 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time AI-Driven People Tracking and Counting Using Overhead Cameras
Nov 15, 2024Accurate people counting in smart buildings and intelligent transportation systems is crucial for energy management, safety protocols, and resource allocation. This is especially critical during emergencies, where precise occupant counts are vital for safe evacuation. Existing methods struggle with large crowds, often losing accuracy with even a few additional people. To address this limitation, this study proposes a novel approach combining a new object tracking algorithm, a novel counting algorithm, and a fine-tuned object detection model. This method achieves 97% accuracy in real-time people counting with a frame rate of 20-27 FPS on a low-power edge computer.
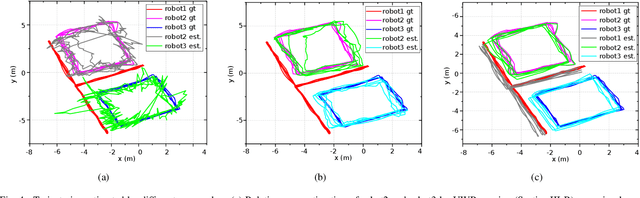
GMC-Pos: Graph-Based Multi-Robot Coverage Positioning Method
Oct 18, 2023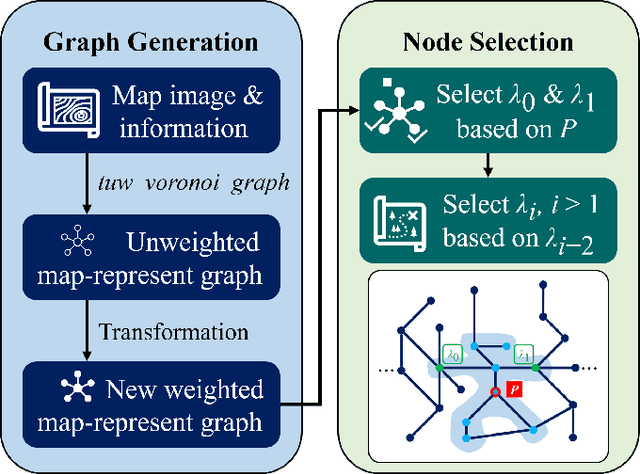
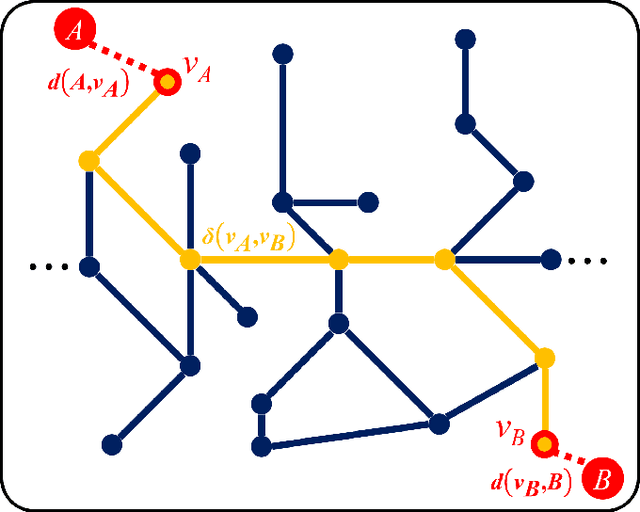
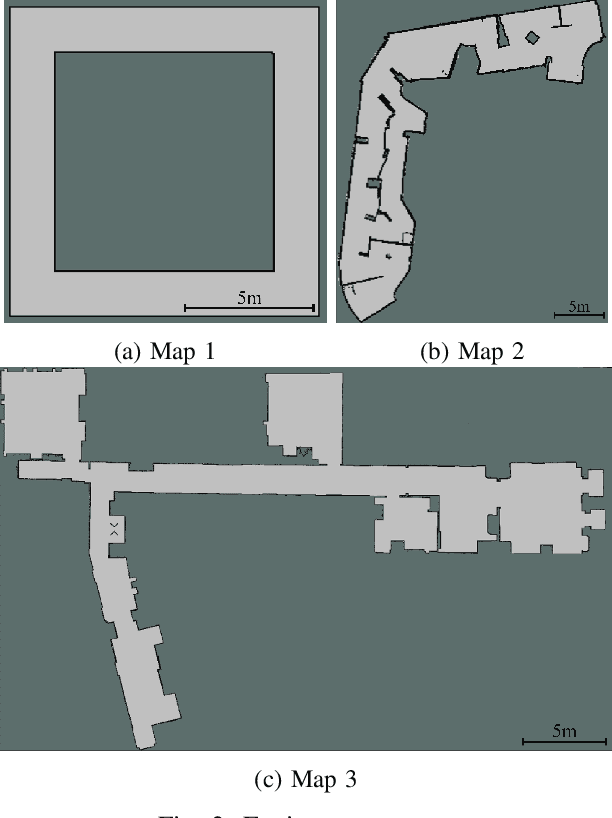
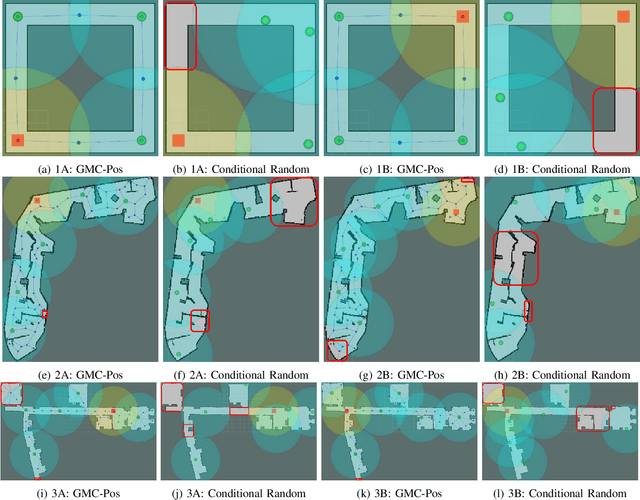
Nowadays, several real-world tasks require adequate environment coverage for maintaining communication between multiple robots, for example, target search tasks, environmental monitoring, and post-disaster rescues. In this study, we look into a situation where there are a human operator and multiple robots, and we assume that each human or robot covers a certain range of areas. We want them to maximize their area of coverage collectively. Therefore, in this paper, we propose the Graph-Based Multi-Robot Coverage Positioning Method (GMC-Pos) to find strategic positions for robots that maximize the area coverage. Our novel approach consists of two main modules: graph generation and node selection. Firstly, graph generation represents the environment using a weighted connected graph. Then, we present a novel generalized graph-based distance and utilize it together with the graph degrees to be the conditions for node selection in a recursive manner. Our method is deployed in three environments with different settings. The results show that it outperforms the benchmark method by 15.13% to 24.88% regarding the area coverage percentage.
Relative Localization of Mobile Robots with Multiple Ultra-WideBand Ranging Measurements
Jul 30, 2021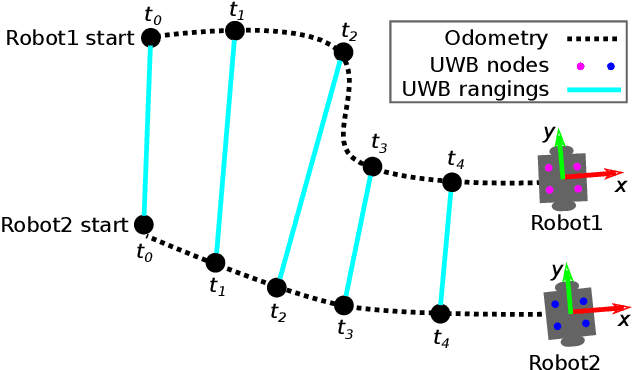

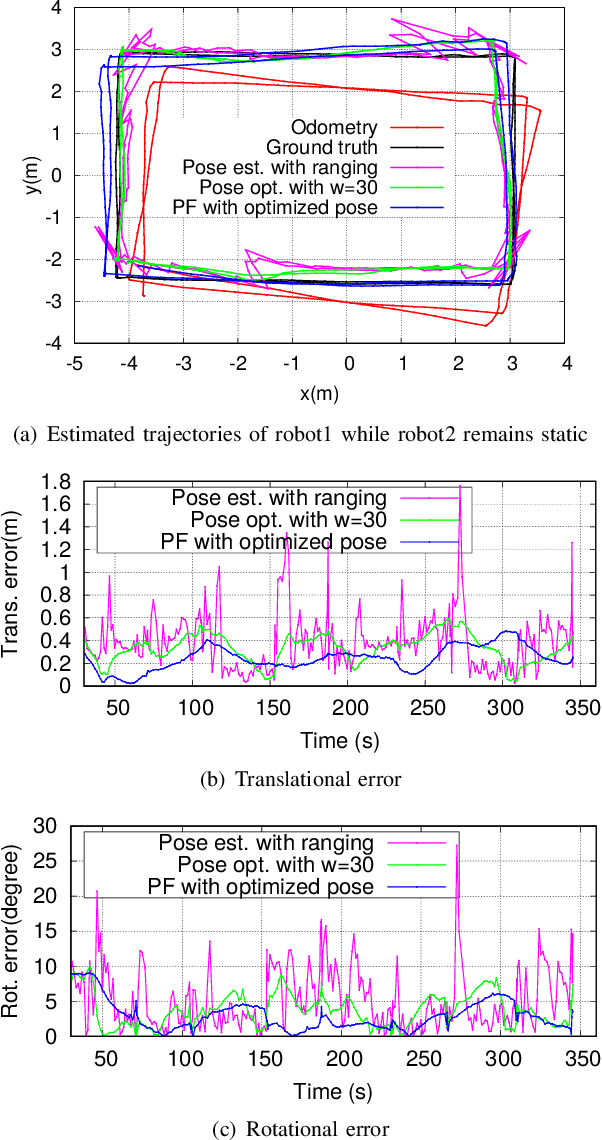
Relative localization between autonomous robots without infrastructure is crucial to achieve their navigation, path planning, and formation in many applications, such as emergency response, where acquiring a prior knowledge of the environment is not possible. The traditional Ultra-WideBand (UWB)-based approach provides a good estimation of the distance between the robots, but obtaining the relative pose (including the displacement and orientation) remains challenging. We propose an approach to estimate the relative pose between a group of robots by equipping each robot with multiple UWB ranging nodes. We determine the pose between two robots by minimizing the residual error of the ranging measurements from all UWB nodes. To improve the localization accuracy, we propose to utilize the odometry constraints through a sliding window-based optimization. The optimized pose is then fused with the odometry in a particle filtering for pose tracking among a group of mobile robots. We have conducted extensive experiments to validate the effectiveness of the proposed approach.
Urban Space Insights Extraction using Acoustic Histogram Information
Dec 14, 2020



Urban data mining can be identified as a highly potential area that can enhance the smart city services towards better sustainable development especially in the urban residential activity tracking. While existing human activity tracking systems have demonstrated the capability to unveil the hidden aspects of citizens' behavior, they often come with a high implementation cost and require a large communication bandwidth. In this paper, we study the implementation of low-cost analogue sound sensors to detect outdoor activities and estimate the raining period in an urban residential area. The analogue sound sensors are transmitted to the cloud every 5 minutes in histogram format, which consists of sound data sampled every 100ms (10Hz). We then use wavelet transformation (WT) and principal component analysis (PCA) to generate a more robust and consistent feature set from the histogram. After that, we performed unsupervised clustering and attempt to understand the individual characteristics of each cluster to identify outdoor residential activities. In addition, on-site validation has been conducted to show the effectiveness of our approach.
Understanding Crowd Behaviors in a Social Event by Passive WiFi Sensing and Data Mining
Feb 05, 2020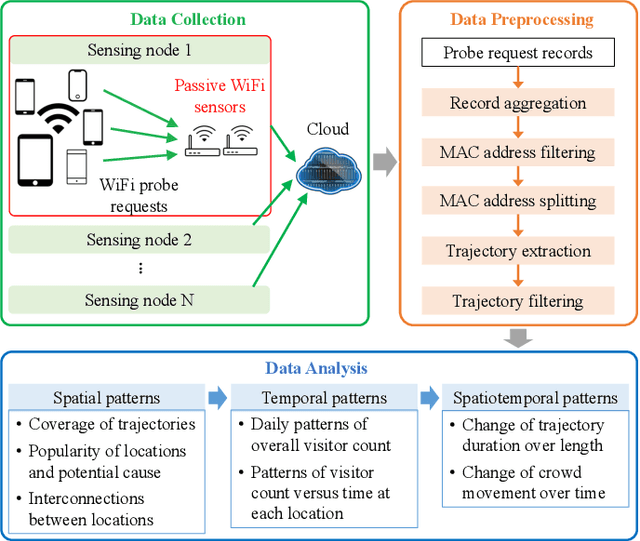
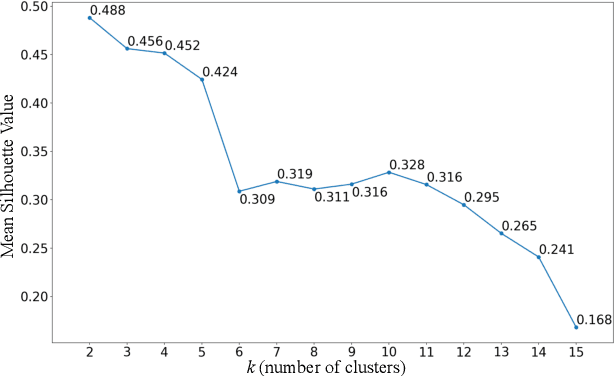
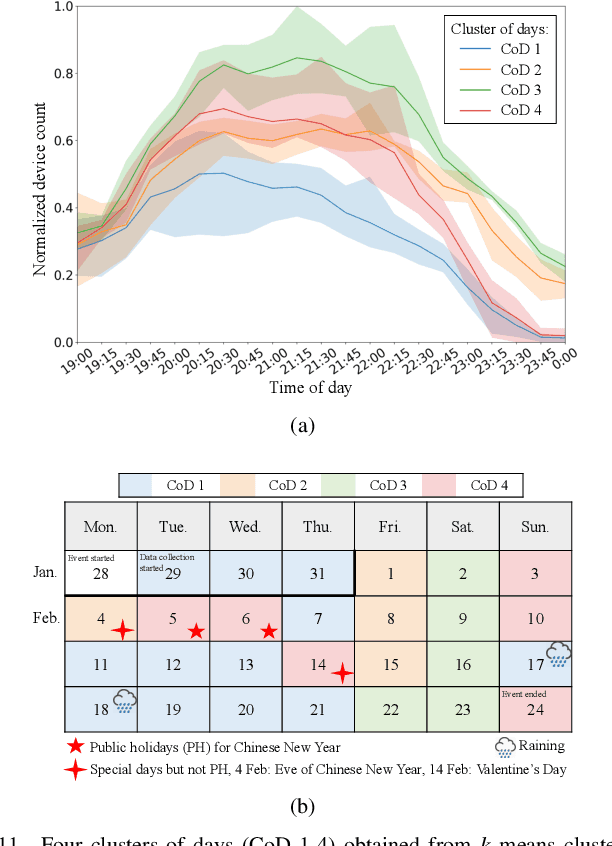
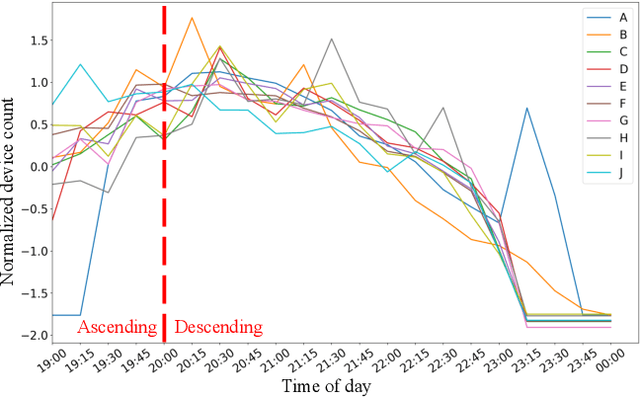
Understanding crowd behaviors in a large social event is crucial for event management. Passive WiFi sensing, by collecting WiFi probe requests sent from mobile devices, provides a better way to monitor crowds compared with people counters and cameras in terms of free interference, larger coverage, lower cost, and more information on people's movement. In existing studies, however, not enough attention has been paid to the thorough analysis and mining of collected data. Especially, the power of machine learning has not been fully exploited. In this paper, therefore, we propose a comprehensive data analysis framework to fully analyze the collected probe requests to extract three types of patterns related to crowd behaviors in a large social event, with the help of statistics, visualization, and unsupervised machine learning. First, trajectories of the mobile devices are extracted from probe requests and analyzed to reveal the spatial patterns of the crowds' movement. Hierarchical agglomerative clustering is adopted to find the interconnections between different locations. Next, k-means and k-shape clustering algorithms are applied to extract temporal visiting patterns of the crowds by days and locations, respectively. Finally, by combining with time, trajectories are transformed into spatiotemporal patterns, which reveal how trajectory duration changes over the length and how the overall trends of crowd movement change over time. The proposed data analysis framework is fully demonstrated using real-world data collected in a large social event. Results show that one can extract comprehensive patterns from data collected by a network of passive WiFi sensors.