 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGMC-Pos: Graph-Based Multi-Robot Coverage Positioning Method
Paper and Code
Oct 18, 2023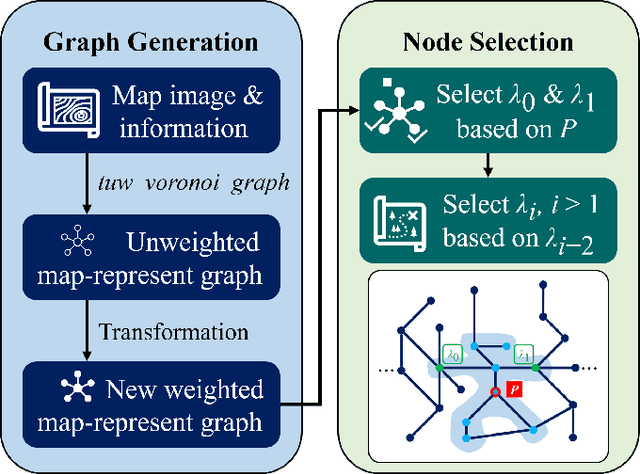
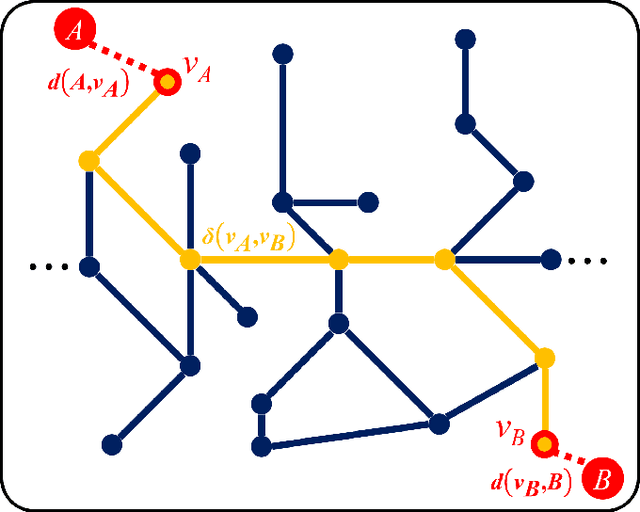
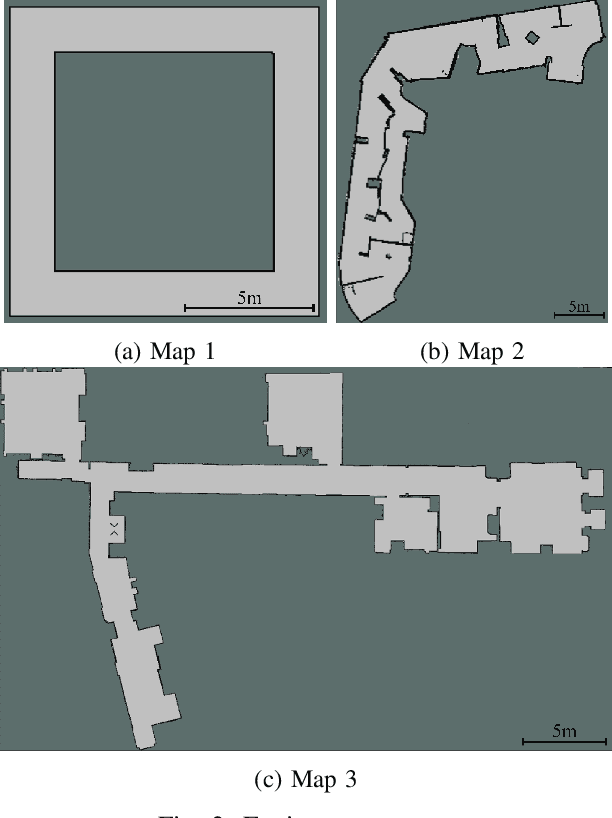
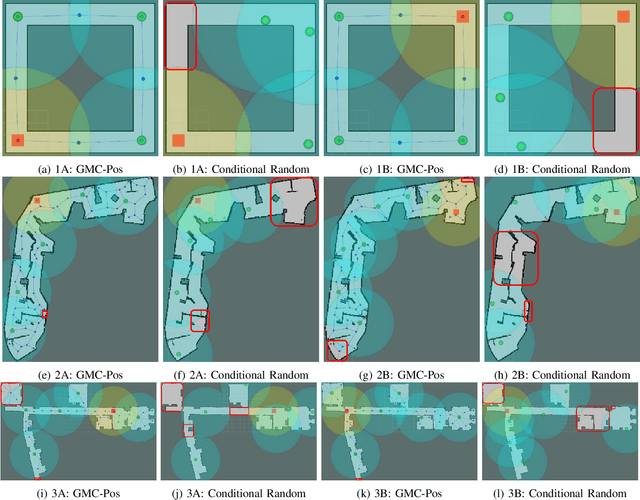
Nowadays, several real-world tasks require adequate environment coverage for maintaining communication between multiple robots, for example, target search tasks, environmental monitoring, and post-disaster rescues. In this study, we look into a situation where there are a human operator and multiple robots, and we assume that each human or robot covers a certain range of areas. We want them to maximize their area of coverage collectively. Therefore, in this paper, we propose the Graph-Based Multi-Robot Coverage Positioning Method (GMC-Pos) to find strategic positions for robots that maximize the area coverage. Our novel approach consists of two main modules: graph generation and node selection. Firstly, graph generation represents the environment using a weighted connected graph. Then, we present a novel generalized graph-based distance and utilize it together with the graph degrees to be the conditions for node selection in a recursive manner. Our method is deployed in three environments with different settings. The results show that it outperforms the benchmark method by 15.13% to 24.88% regarding the area coverage percentage.