 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMEF-Explore: Communication-Constrained Multi-Robot Entropy-Field-Based Exploration
May 29, 2025Collaborative multiple robots for unknown environment exploration have become mainstream due to their remarkable performance and efficiency. However, most existing methods assume perfect robots' communication during exploration, which is unattainable in real-world settings. Though there have been recent works aiming to tackle communication-constrained situations, substantial room for advancement remains for both information-sharing and exploration strategy aspects. In this paper, we propose a Communication-Constrained Multi-Robot Entropy-Field-Based Exploration (MEF-Explore). The first module of the proposed method is the two-layer inter-robot communication-aware information-sharing strategy. A dynamic graph is used to represent a multi-robot network and to determine communication based on whether it is low-speed or high-speed. Specifically, low-speed communication, which is always accessible between every robot, can only be used to share their current positions. If robots are within a certain range, high-speed communication will be available for inter-robot map merging. The second module is the entropy-field-based exploration strategy. Particularly, robots explore the unknown area distributedly according to the novel forms constructed to evaluate the entropies of frontiers and robots. These entropies can also trigger implicit robot rendezvous to enhance inter-robot map merging if feasible. In addition, we include the duration-adaptive goal-assigning module to manage robots' goal assignment. The simulation results demonstrate that our MEF-Explore surpasses the existing ones regarding exploration time and success rate in all scenarios. For real-world experiments, our method leads to a 21.32% faster exploration time and a 16.67% higher success rate compared to the baseline.
Distributed multi-robot potential-field-based exploration with submap-based mapping and noise-augmented strategy
Jul 10, 2024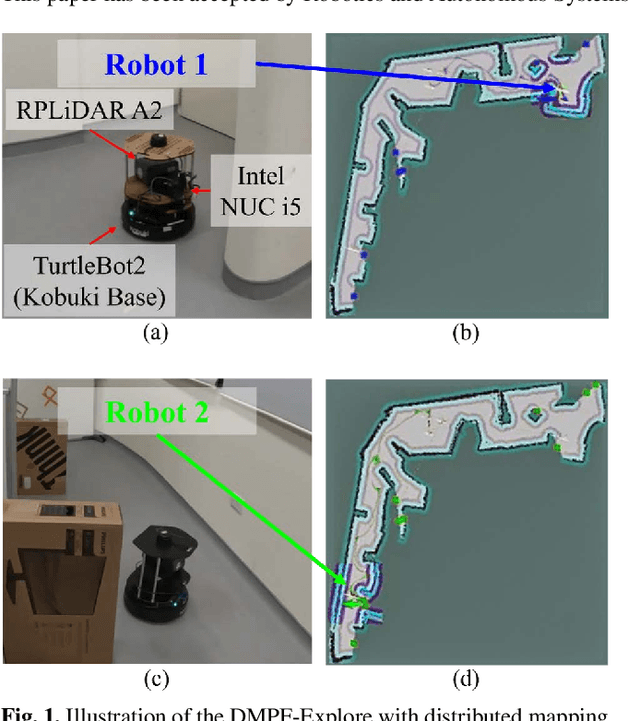
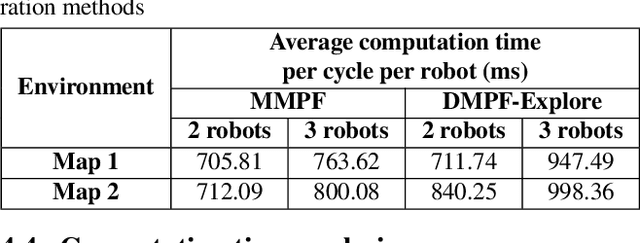
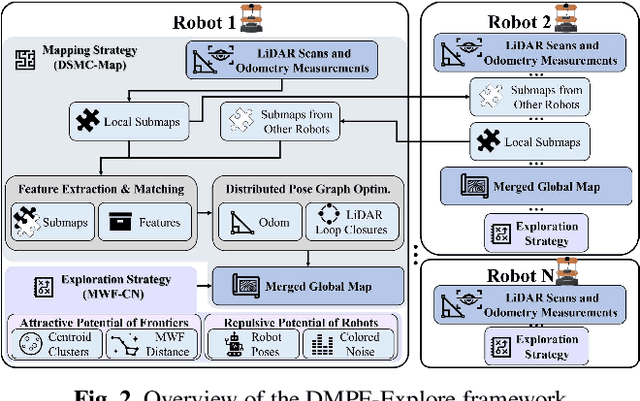
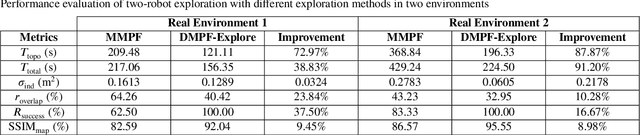
Multi-robot collaboration has become a needed component in unknown environment exploration due to its ability to accomplish various challenging situations. Potential-field-based methods are widely used for autonomous exploration because of their high efficiency and low travel cost. However, exploration speed and collaboration ability are still challenging topics. Therefore, we propose a Distributed Multi-Robot Potential-Field-Based Exploration (DMPF-Explore). In particular, we first present a Distributed Submap-Based Multi-Robot Collaborative Mapping Method (DSMC-Map), which can efficiently estimate the robot trajectories and construct the global map by merging the local maps from each robot. Second, we introduce a Potential-Field-Based Exploration Strategy Augmented with Modified Wave-Front Distance and Colored Noises (MWF-CN), in which the accessible frontier neighborhood is extended, and the colored noise provokes the enhancement of exploration performance. The proposed exploration method is deployed for simulation and real-world scenarios. The results show that our approach outperforms the existing ones regarding exploration speed and collaboration ability.
GMC-Pos: Graph-Based Multi-Robot Coverage Positioning Method
Oct 18, 2023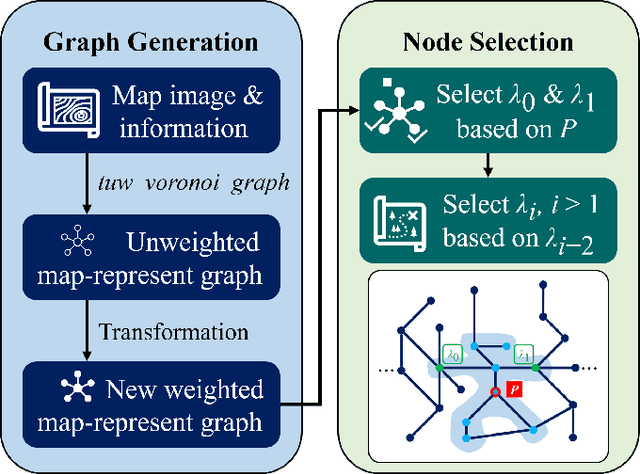
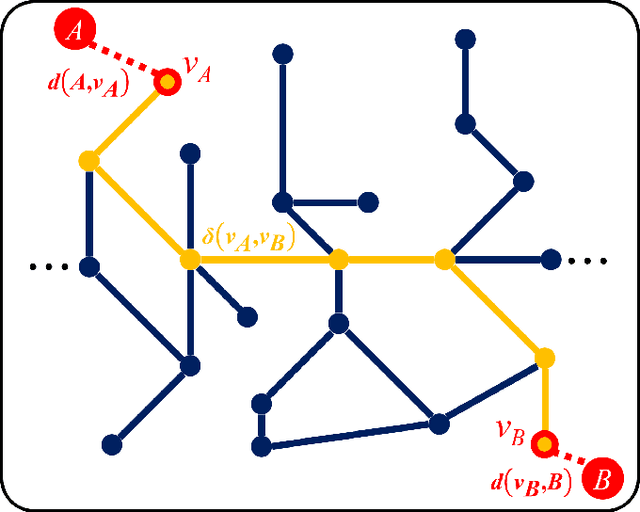
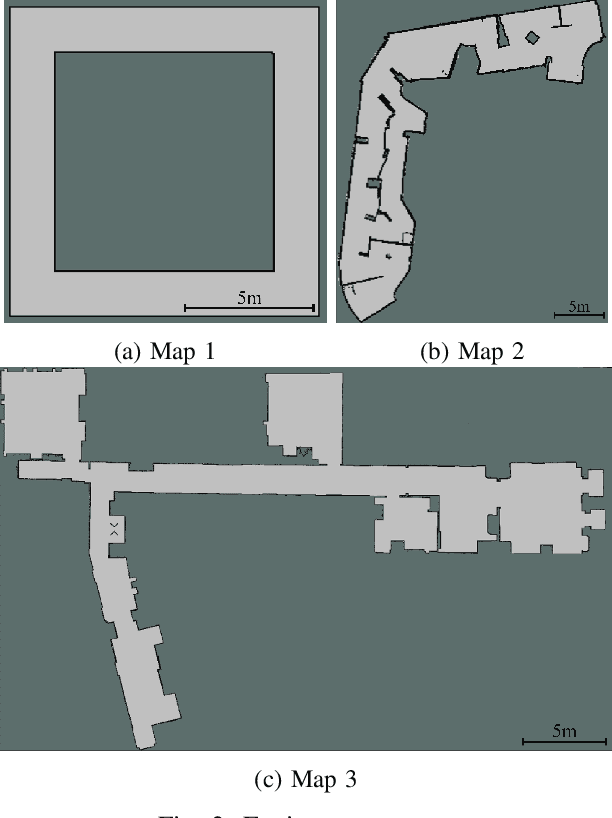
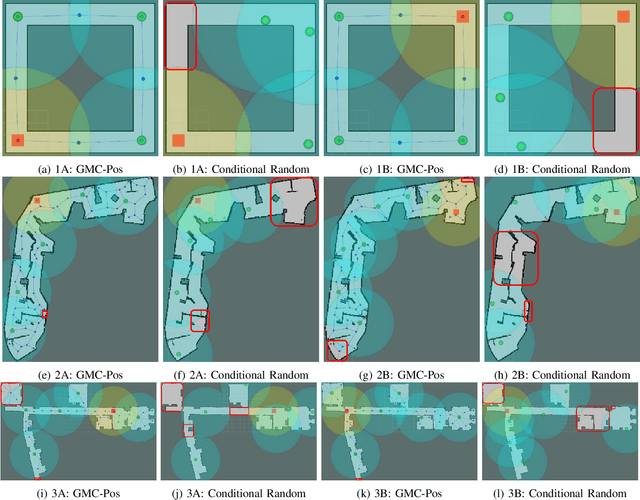
Nowadays, several real-world tasks require adequate environment coverage for maintaining communication between multiple robots, for example, target search tasks, environmental monitoring, and post-disaster rescues. In this study, we look into a situation where there are a human operator and multiple robots, and we assume that each human or robot covers a certain range of areas. We want them to maximize their area of coverage collectively. Therefore, in this paper, we propose the Graph-Based Multi-Robot Coverage Positioning Method (GMC-Pos) to find strategic positions for robots that maximize the area coverage. Our novel approach consists of two main modules: graph generation and node selection. Firstly, graph generation represents the environment using a weighted connected graph. Then, we present a novel generalized graph-based distance and utilize it together with the graph degrees to be the conditions for node selection in a recursive manner. Our method is deployed in three environments with different settings. The results show that it outperforms the benchmark method by 15.13% to 24.88% regarding the area coverage percentage.
Moving Object Localization based on the Fusion of Ultra-WideBand and LiDAR with a Mobile Robot
Oct 16, 2023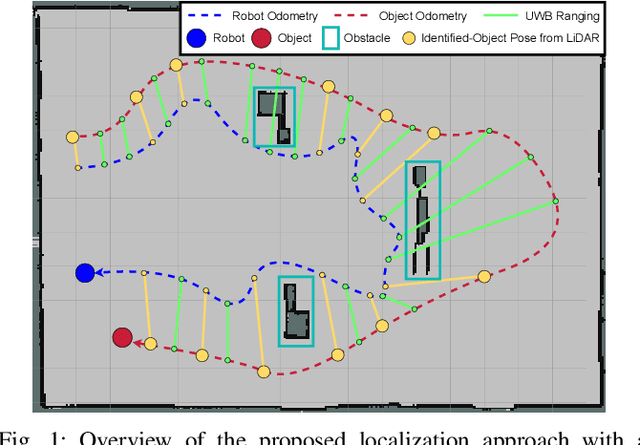
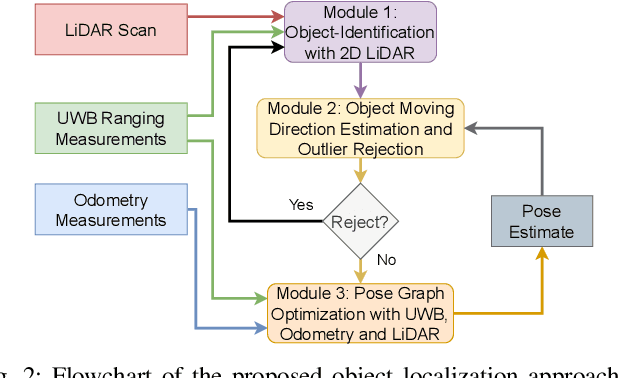
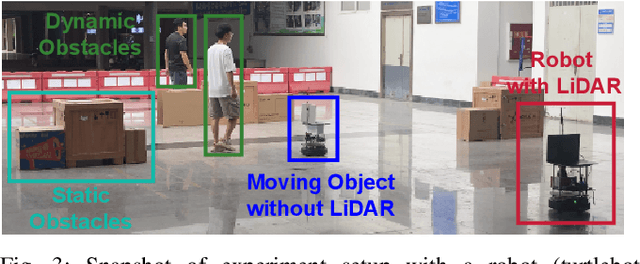

Localization of objects is vital for robot-object interaction. Light Detection and Ranging (LiDAR) application in robotics is an emerging and widely used object localization technique due to its accurate distance measurement, long-range, wide field of view, and robustness in different conditions. However, LiDAR is unable to identify the objects when they are obstructed by obstacles, resulting in inaccuracy and noise in localization. To address this issue, we present an approach incorporating LiDAR and Ultra-Wideband (UWB) ranging for object localization. The UWB is popular in sensor fusion localization algorithms due to its low weight and low power consumption. In addition, the UWB is able to return ranging measurements even when the object is not within line-of-sight. Our approach provides an efficient solution to combine an anonymous optical sensor (LiDAR) with an identity-based radio sensor (UWB) to improve the localization accuracy of the object. Our approach consists of three modules. The first module is an object-identification algorithm that compares successive scans from the LiDAR to detect a moving object in the environment and returns the position with the closest range to UWB ranging. The second module estimates the moving object's moving direction using the previous and current estimated position from our object-identification module. It removes the suspicious estimations through an outlier rejection criterion. Lastly, we fuse the LiDAR, UWB ranging, and odometry measurements in pose graph optimization (PGO) to recover the entire trajectory of the robot and object. Extensive experiments were performed to evaluate the performance of the proposed approach.