 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMEF-Explore: Communication-Constrained Multi-Robot Entropy-Field-Based Exploration
May 29, 2025Collaborative multiple robots for unknown environment exploration have become mainstream due to their remarkable performance and efficiency. However, most existing methods assume perfect robots' communication during exploration, which is unattainable in real-world settings. Though there have been recent works aiming to tackle communication-constrained situations, substantial room for advancement remains for both information-sharing and exploration strategy aspects. In this paper, we propose a Communication-Constrained Multi-Robot Entropy-Field-Based Exploration (MEF-Explore). The first module of the proposed method is the two-layer inter-robot communication-aware information-sharing strategy. A dynamic graph is used to represent a multi-robot network and to determine communication based on whether it is low-speed or high-speed. Specifically, low-speed communication, which is always accessible between every robot, can only be used to share their current positions. If robots are within a certain range, high-speed communication will be available for inter-robot map merging. The second module is the entropy-field-based exploration strategy. Particularly, robots explore the unknown area distributedly according to the novel forms constructed to evaluate the entropies of frontiers and robots. These entropies can also trigger implicit robot rendezvous to enhance inter-robot map merging if feasible. In addition, we include the duration-adaptive goal-assigning module to manage robots' goal assignment. The simulation results demonstrate that our MEF-Explore surpasses the existing ones regarding exploration time and success rate in all scenarios. For real-world experiments, our method leads to a 21.32% faster exploration time and a 16.67% higher success rate compared to the baseline.
NORA: A Small Open-Sourced Generalist Vision Language Action Model for Embodied Tasks
Apr 28, 2025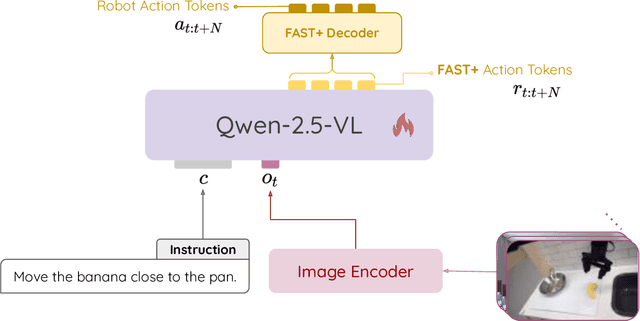
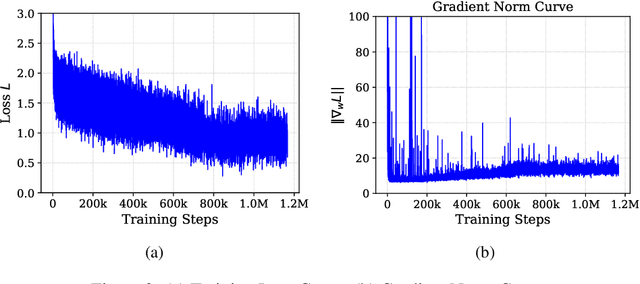

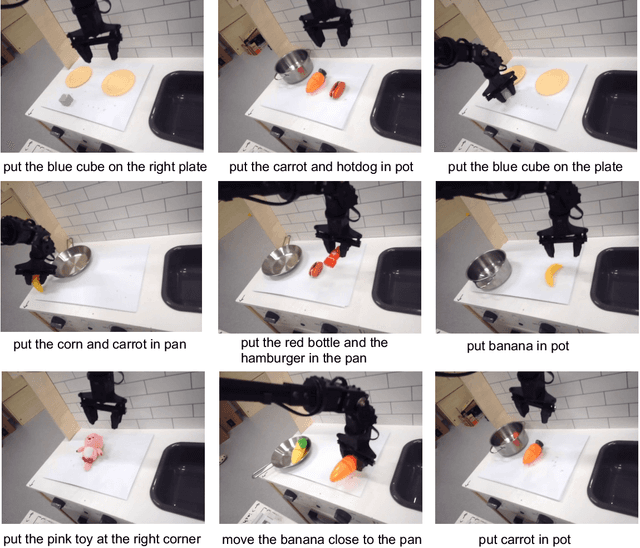
Existing Visual-Language-Action (VLA) models have shown promising performance in zero-shot scenarios, demonstrating impressive task execution and reasoning capabilities. However, a significant challenge arises from the limitations of visual encoding, which can result in failures during tasks such as object grasping. Moreover, these models typically suffer from high computational overhead due to their large sizes, often exceeding 7B parameters. While these models excel in reasoning and task planning, the substantial computational overhead they incur makes them impractical for real-time robotic environments, where speed and efficiency are paramount. To address the limitations of existing VLA models, we propose NORA, a 3B-parameter model designed to reduce computational overhead while maintaining strong task performance. NORA adopts the Qwen-2.5-VL-3B multimodal model as its backbone, leveraging its superior visual-semantic understanding to enhance visual reasoning and action grounding. Additionally, our \model{} is trained on 970k real-world robot demonstrations and equipped with the FAST+ tokenizer for efficient action sequence generation. Experimental results demonstrate that NORA outperforms existing large-scale VLA models, achieving better task performance with significantly reduced computational overhead, making it a more practical solution for real-time robotic autonomy.
Emma-X: An Embodied Multimodal Action Model with Grounded Chain of Thought and Look-ahead Spatial Reasoning
Dec 17, 2024Traditional reinforcement learning-based robotic control methods are often task-specific and fail to generalize across diverse environments or unseen objects and instructions. Visual Language Models (VLMs) demonstrate strong scene understanding and planning capabilities but lack the ability to generate actionable policies tailored to specific robotic embodiments. To address this, Visual-Language-Action (VLA) models have emerged, yet they face challenges in long-horizon spatial reasoning and grounded task planning. In this work, we propose the Embodied Multimodal Action Model with Grounded Chain of Thought and Look-ahead Spatial Reasoning, Emma-X. Emma-X leverages our constructed hierarchical embodiment dataset based on BridgeV2, containing 60,000 robot manipulation trajectories auto-annotated with grounded task reasoning and spatial guidance. Additionally, we introduce a trajectory segmentation strategy based on gripper states and motion trajectories, which can help mitigate hallucination in grounding subtask reasoning generation. Experimental results demonstrate that Emma-X achieves superior performance over competitive baselines, particularly in real-world robotic tasks requiring spatial reasoning.
A Scalable Decentralized Reinforcement Learning Framework for UAV Target Localization Using Recurrent PPO
Dec 09, 2024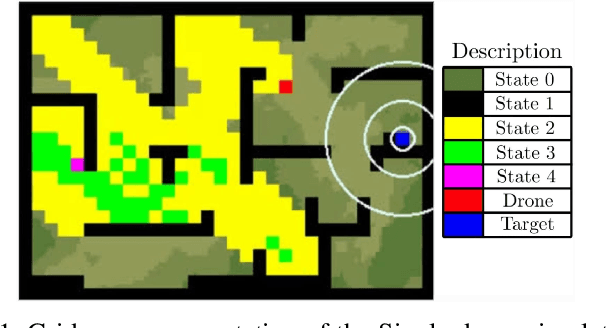
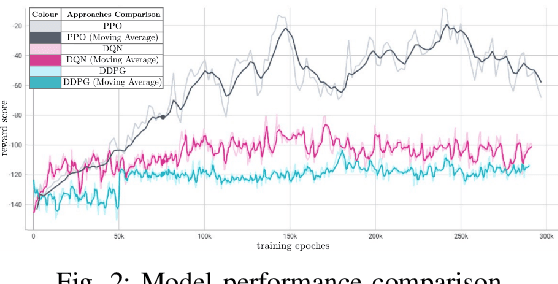
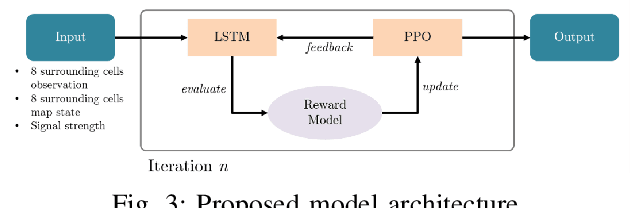
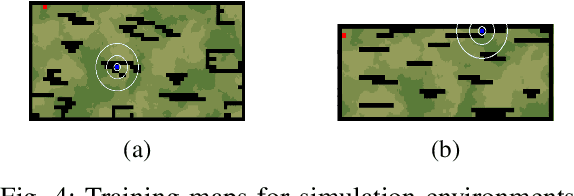
The rapid advancements in unmanned aerial vehicles (UAVs) have unlocked numerous applications, including environmental monitoring, disaster response, and agricultural surveying. Enhancing the collective behavior of multiple decentralized UAVs can significantly improve these applications through more efficient and coordinated operations. In this study, we explore a Recurrent PPO model for target localization in perceptually degraded environments like places without GNSS/GPS signals. We first developed a single-drone approach for target identification, followed by a decentralized two-drone model. Our approach can utilize two types of sensors on the UAVs, a detection sensor and a target signal sensor. The single-drone model achieved an accuracy of 93%, while the two-drone model achieved an accuracy of 86%, with the latter requiring fewer average steps to locate the target. This demonstrates the potential of our method in UAV swarms, offering efficient and effective localization of radiant targets in complex environmental conditions.
Distributed multi-robot potential-field-based exploration with submap-based mapping and noise-augmented strategy
Jul 10, 2024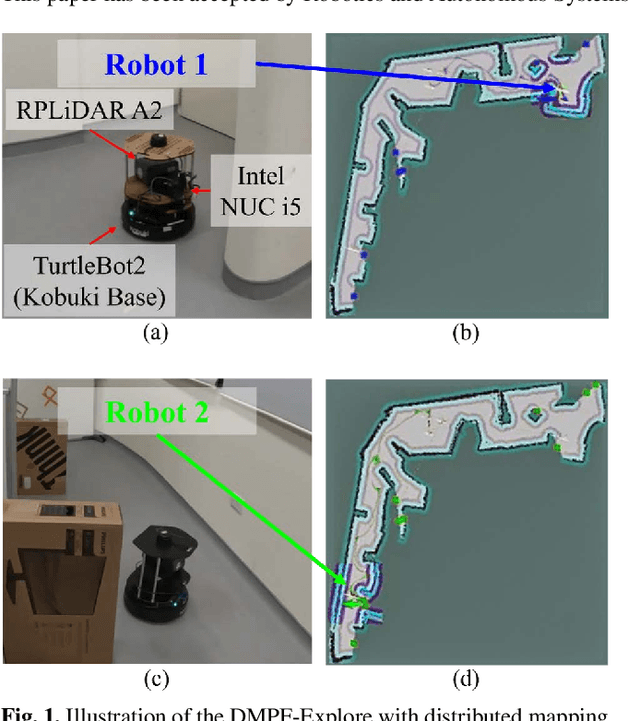
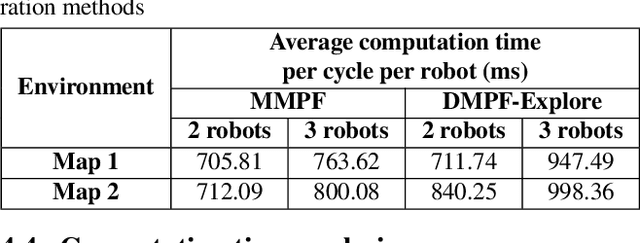
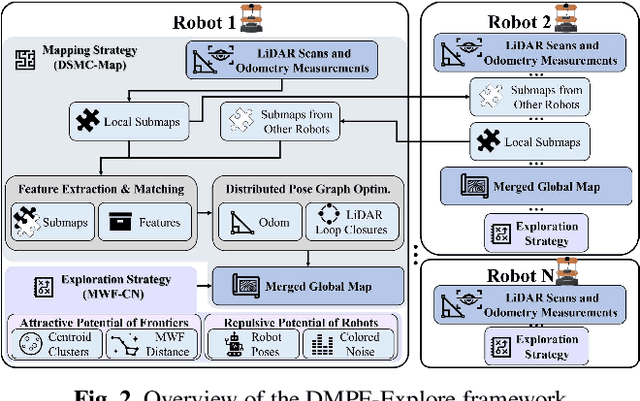
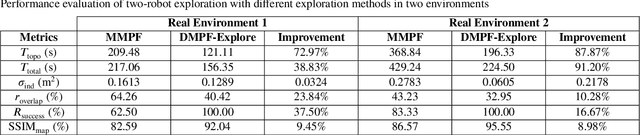
Multi-robot collaboration has become a needed component in unknown environment exploration due to its ability to accomplish various challenging situations. Potential-field-based methods are widely used for autonomous exploration because of their high efficiency and low travel cost. However, exploration speed and collaboration ability are still challenging topics. Therefore, we propose a Distributed Multi-Robot Potential-Field-Based Exploration (DMPF-Explore). In particular, we first present a Distributed Submap-Based Multi-Robot Collaborative Mapping Method (DSMC-Map), which can efficiently estimate the robot trajectories and construct the global map by merging the local maps from each robot. Second, we introduce a Potential-Field-Based Exploration Strategy Augmented with Modified Wave-Front Distance and Colored Noises (MWF-CN), in which the accessible frontier neighborhood is extended, and the colored noise provokes the enhancement of exploration performance. The proposed exploration method is deployed for simulation and real-world scenarios. The results show that our approach outperforms the existing ones regarding exploration speed and collaboration ability.
UWB Radar SLAM: an Anchorless Approach in Vision Denied Indoor Environments
Nov 25, 2023



LiDAR and cameras are frequently used as sensors for simultaneous localization and mapping (SLAM). However, these sensors are prone to failure under low visibility (e.g. smoke) or places with reflective surfaces (e.g. mirrors). On the other hand, electromagnetic waves exhibit better penetration properties when the wavelength increases, thus are not affected by low visibility. Hence, this paper presents ultra-wideband (UWB) radar as an alternative to the existing sensors. UWB is generally known to be used in anchor-tag SLAM systems. One or more anchors are installed in the environment and the tags are attached to the robots. Although this method performs well under low visibility, modifying the existing infrastructure is not always feasible. UWB has also been used in peer-to-peer ranging collaborative SLAM systems. However, this requires more than a single robot and does not include mapping in the mentioned environment like smoke. Therefore, the presented approach in this paper solely depends on the UWB transceivers mounted on-board. In addition, an extended Kalman filter (EKF) SLAM is used to solve the SLAM problem at the back-end. Experiments were conducted and demonstrated that the proposed UWB-based radar SLAM is able to map natural point landmarks inside an indoor environment while improving robot localization.
Initialisation of Autonomous Aircraft Visual Inspection Systems via CNN-Based Camera Pose Estimation
Nov 06, 2023General Visual Inspection is a manual inspection process regularly used to detect and localise obvious damage on the exterior of commercial aircraft. There has been increasing demand to perform this process at the boarding gate to minimize the downtime of the aircraft and automating this process is desired to reduce the reliance on human labour. This automation typically requires the first step of estimating a camera's pose with respect to the aircraft for initialisation. However, localisation methods often require infrastructure, which can be very challenging when performed in uncontrolled outdoor environments and within the limited turnover time (approximately 2 hours) on an airport tarmac. In addition, access to commercial aircraft can be very restricted, causing development and testing of solutions to be a challenge. Hence, this paper proposes an on-site infrastructure-less initialisation method, by using the same pan-tilt-zoom camera used for the inspection task to estimate its own pose. This is achieved using a Deep Convolutional Neural Network trained with only synthetic images to regress the camera's pose. We apply domain randomisation when generating our dataset for training our network and improve prediction accuracy by introducing a new component to an existing loss function that leverages on known aircraft geometry to relate position and orientation. Experiments are conducted and we have successfully regressed camera poses with a median error of 0.22 m and 0.73 degrees.
Marker-Based Localisation System Using an Active PTZ Camera and CNN-Based Ellipse Detection
Nov 06, 2023Localisation in GPS-denied environments is challenging and many existing solutions have infrastructural and on-site calibration requirements. This paper tackles these challenges by proposing a localisation system that is infrastructure-free and does not require on-site calibration, using a single active PTZ camera to detect, track and localise a circular LED marker. We propose to use a CNN trained using only synthetic images to detect the LED marker as an ellipse and show that our approach is more robust than using traditional ellipse detection without requiring tuning of parameters for feature extraction. We also propose to leverage the predicted elliptical angle as a measure of uncertainty of the CNN's predictions and show how it can be used in a filter to improve marker range estimation and 3D localisation. We evaluate our system's performance through localisation of a UAV in real-world flight experiments and show that it can outperform alternative methods for localisation in GPS-denied environments. We also demonstrate our system's performance in indoor and outdoor environments.
Monocular UAV Localisation with Deep Learning and Uncertainty Propagation
Nov 06, 2023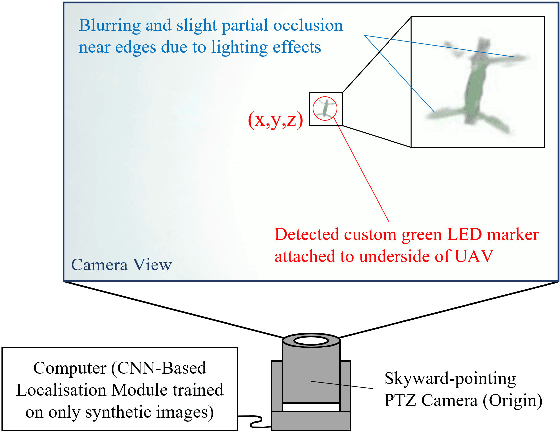


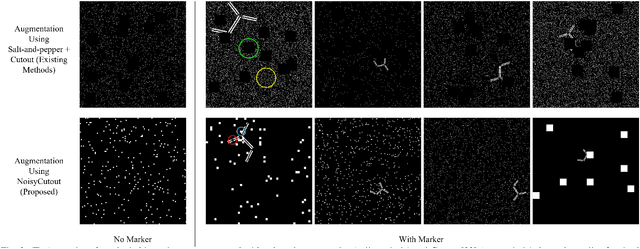
In this paper, we propose a ground-based monocular UAV localisation system that detects and localises an LED marker attached to the underside of a UAV. Our system removes the need for extensive infrastructure and calibration unlike existing technologies such as UWB, radio frequency and multi-camera systems often used for localisation in GPS-denied environment. To improve deployablity for real-world applications without the need to collect extensive real dataset, we train a CNN on synthetic binary images as opposed to using real images in existing monocular UAV localisation methods, and factor in the camera's zoom to allow tracking of UAVs flying at further distances. We propose NoisyCutout algorithm for augmenting synthetic binary images to simulate binary images processed from real images and show that it improves localisation accuracy as compared to using existing salt-and-pepper and Cutout augmentation methods. We also leverage uncertainty propagation to modify the CNN's loss function and show that this also improves localisation accuracy. Real-world experiments are conducted to evaluate our methods and we achieve an overall 3D RMSE of approximately 0.41m.
GMC-Pos: Graph-Based Multi-Robot Coverage Positioning Method
Oct 18, 2023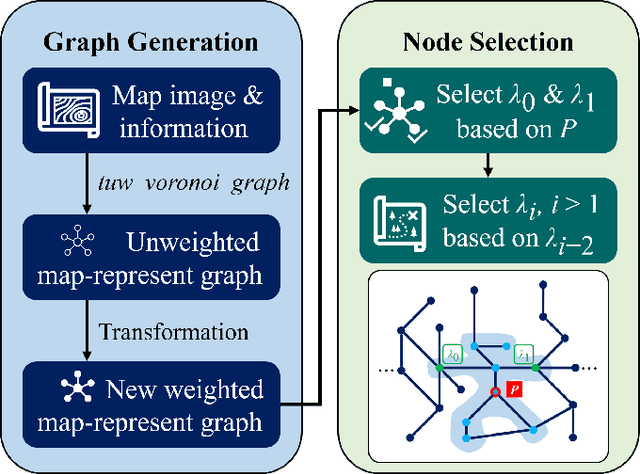
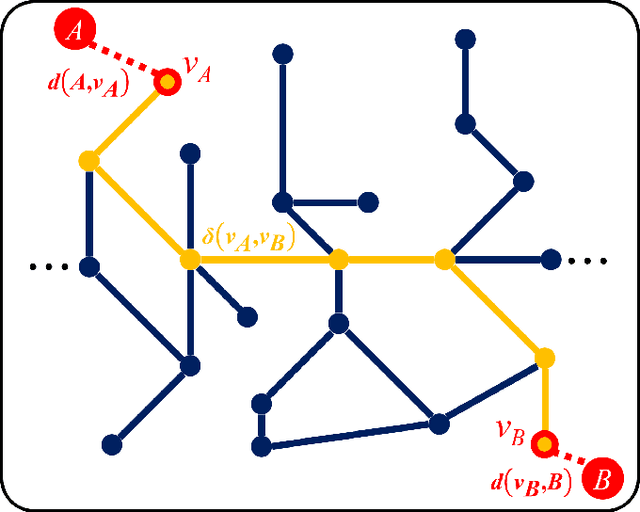
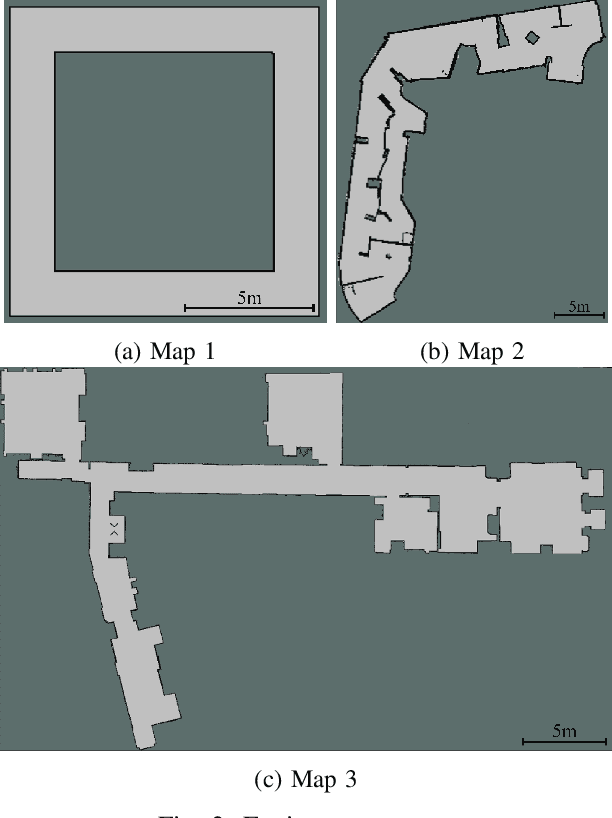
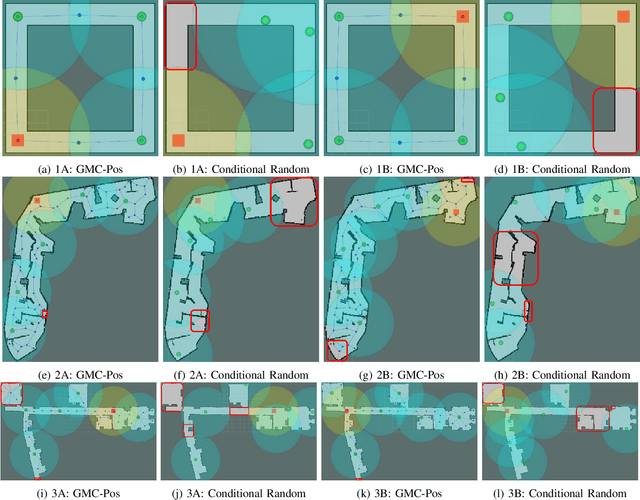
Nowadays, several real-world tasks require adequate environment coverage for maintaining communication between multiple robots, for example, target search tasks, environmental monitoring, and post-disaster rescues. In this study, we look into a situation where there are a human operator and multiple robots, and we assume that each human or robot covers a certain range of areas. We want them to maximize their area of coverage collectively. Therefore, in this paper, we propose the Graph-Based Multi-Robot Coverage Positioning Method (GMC-Pos) to find strategic positions for robots that maximize the area coverage. Our novel approach consists of two main modules: graph generation and node selection. Firstly, graph generation represents the environment using a weighted connected graph. Then, we present a novel generalized graph-based distance and utilize it together with the graph degrees to be the conditions for node selection in a recursive manner. Our method is deployed in three environments with different settings. The results show that it outperforms the benchmark method by 15.13% to 24.88% regarding the area coverage percentage.