 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Monocular UAV Localisation with Deep Learning and Uncertainty Propagation
Nov 06, 2023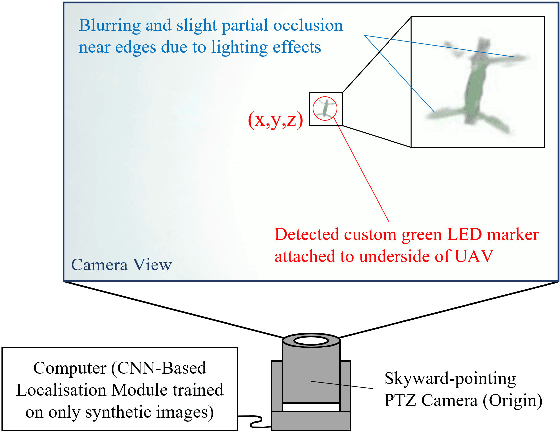


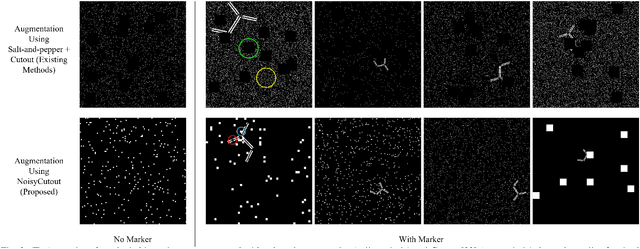
In this paper, we propose a ground-based monocular UAV localisation system that detects and localises an LED marker attached to the underside of a UAV. Our system removes the need for extensive infrastructure and calibration unlike existing technologies such as UWB, radio frequency and multi-camera systems often used for localisation in GPS-denied environment. To improve deployablity for real-world applications without the need to collect extensive real dataset, we train a CNN on synthetic binary images as opposed to using real images in existing monocular UAV localisation methods, and factor in the camera's zoom to allow tracking of UAVs flying at further distances. We propose NoisyCutout algorithm for augmenting synthetic binary images to simulate binary images processed from real images and show that it improves localisation accuracy as compared to using existing salt-and-pepper and Cutout augmentation methods. We also leverage uncertainty propagation to modify the CNN's loss function and show that this also improves localisation accuracy. Real-world experiments are conducted to evaluate our methods and we achieve an overall 3D RMSE of approximately 0.41m.
Marker-Based Localisation System Using an Active PTZ Camera and CNN-Based Ellipse Detection
Nov 06, 2023Localisation in GPS-denied environments is challenging and many existing solutions have infrastructural and on-site calibration requirements. This paper tackles these challenges by proposing a localisation system that is infrastructure-free and does not require on-site calibration, using a single active PTZ camera to detect, track and localise a circular LED marker. We propose to use a CNN trained using only synthetic images to detect the LED marker as an ellipse and show that our approach is more robust than using traditional ellipse detection without requiring tuning of parameters for feature extraction. We also propose to leverage the predicted elliptical angle as a measure of uncertainty of the CNN's predictions and show how it can be used in a filter to improve marker range estimation and 3D localisation. We evaluate our system's performance through localisation of a UAV in real-world flight experiments and show that it can outperform alternative methods for localisation in GPS-denied environments. We also demonstrate our system's performance in indoor and outdoor environments.