 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular UAV Localisation with Deep Learning and Uncertainty Propagation
Nov 06, 2023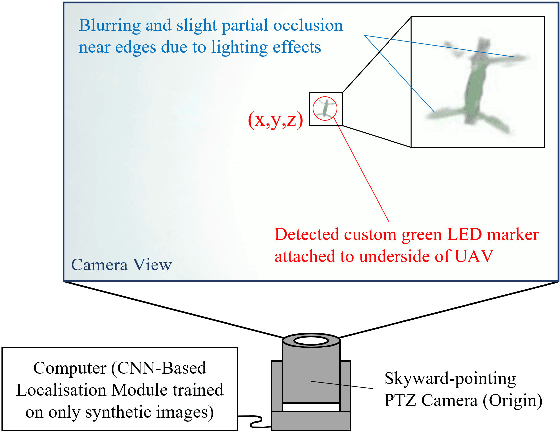


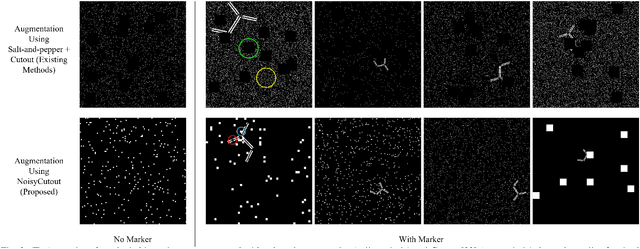
In this paper, we propose a ground-based monocular UAV localisation system that detects and localises an LED marker attached to the underside of a UAV. Our system removes the need for extensive infrastructure and calibration unlike existing technologies such as UWB, radio frequency and multi-camera systems often used for localisation in GPS-denied environment. To improve deployablity for real-world applications without the need to collect extensive real dataset, we train a CNN on synthetic binary images as opposed to using real images in existing monocular UAV localisation methods, and factor in the camera's zoom to allow tracking of UAVs flying at further distances. We propose NoisyCutout algorithm for augmenting synthetic binary images to simulate binary images processed from real images and show that it improves localisation accuracy as compared to using existing salt-and-pepper and Cutout augmentation methods. We also leverage uncertainty propagation to modify the CNN's loss function and show that this also improves localisation accuracy. Real-world experiments are conducted to evaluate our methods and we achieve an overall 3D RMSE of approximately 0.41m.
Initialisation of Autonomous Aircraft Visual Inspection Systems via CNN-Based Camera Pose Estimation
Nov 06, 2023General Visual Inspection is a manual inspection process regularly used to detect and localise obvious damage on the exterior of commercial aircraft. There has been increasing demand to perform this process at the boarding gate to minimize the downtime of the aircraft and automating this process is desired to reduce the reliance on human labour. This automation typically requires the first step of estimating a camera's pose with respect to the aircraft for initialisation. However, localisation methods often require infrastructure, which can be very challenging when performed in uncontrolled outdoor environments and within the limited turnover time (approximately 2 hours) on an airport tarmac. In addition, access to commercial aircraft can be very restricted, causing development and testing of solutions to be a challenge. Hence, this paper proposes an on-site infrastructure-less initialisation method, by using the same pan-tilt-zoom camera used for the inspection task to estimate its own pose. This is achieved using a Deep Convolutional Neural Network trained with only synthetic images to regress the camera's pose. We apply domain randomisation when generating our dataset for training our network and improve prediction accuracy by introducing a new component to an existing loss function that leverages on known aircraft geometry to relate position and orientation. Experiments are conducted and we have successfully regressed camera poses with a median error of 0.22 m and 0.73 degrees.