 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed multi-robot potential-field-based exploration with submap-based mapping and noise-augmented strategy
Jul 10, 2024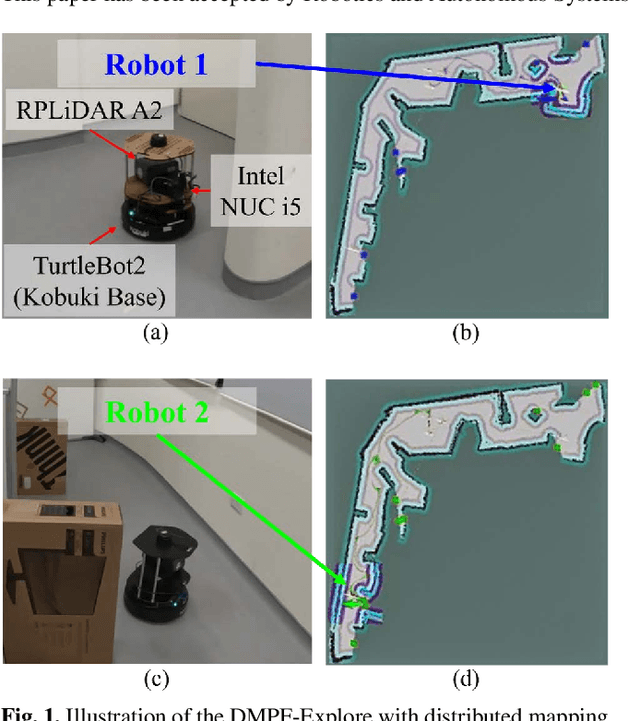
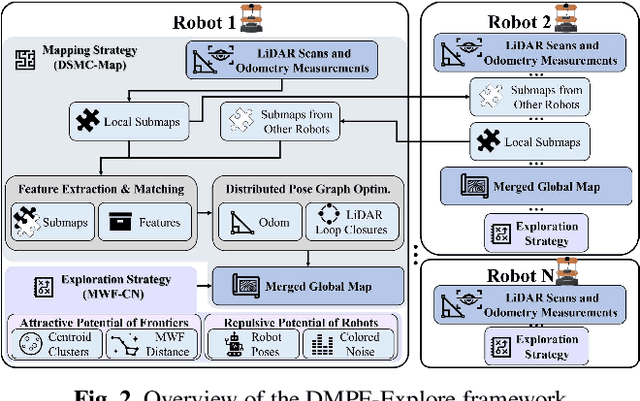
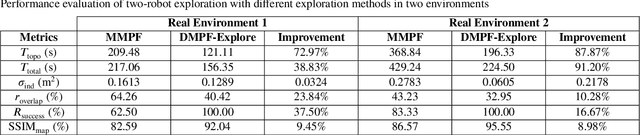
Multi-robot collaboration has become a needed component in unknown environment exploration due to its ability to accomplish various challenging situations. Potential-field-based methods are widely used for autonomous exploration because of their high efficiency and low travel cost. However, exploration speed and collaboration ability are still challenging topics. Therefore, we propose a Distributed Multi-Robot Potential-Field-Based Exploration (DMPF-Explore). In particular, we first present a Distributed Submap-Based Multi-Robot Collaborative Mapping Method (DSMC-Map), which can efficiently estimate the robot trajectories and construct the global map by merging the local maps from each robot. Second, we introduce a Potential-Field-Based Exploration Strategy Augmented with Modified Wave-Front Distance and Colored Noises (MWF-CN), in which the accessible frontier neighborhood is extended, and the colored noise provokes the enhancement of exploration performance. The proposed exploration method is deployed for simulation and real-world scenarios. The results show that our approach outperforms the existing ones regarding exploration speed and collaboration ability.
Distributed Ranging SLAM for Multiple Robots with Ultra-WideBand and Odometry Measurements
Jul 08, 2022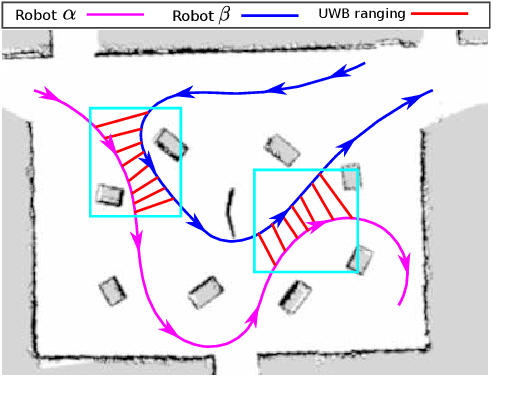
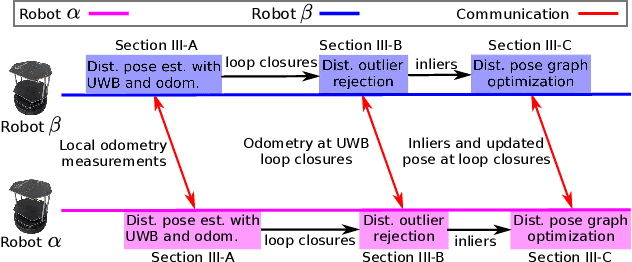
To accomplish task efficiently in a multiple robots system, a problem that has to be addressed is Simultaneous Localization and Mapping (SLAM). LiDAR (Light Detection and Ranging) has been used for many SLAM solutions due to its superb accuracy, but its performance degrades in featureless environments, like tunnels or long corridors. Centralized SLAM solves the problem with a cloud server, which requires a huge amount of computational resources and lacks robustness against central node failure. To address these issues, we present a distributed SLAM solution to estimate the trajectory of a group of robots using Ultra-WideBand (UWB) ranging and odometry measurements. The proposed approach distributes the processing among the robot team and significantly mitigates the computation concern emerged from the centralized SLAM. Our solution determines the relative pose (also known as loop closure) between two robots by minimizing the UWB ranging measurements taken at different positions when the robots are in close proximity. UWB provides a good distance measure in line-of-sight conditions, but retrieving a precise pose estimation remains a challenge, due to ranging noise and unpredictable path traveled by the robot. To deal with the suspicious loop closures, we use Pairwise Consistency Maximization (PCM) to examine the quality of loop closures and perform outlier rejections. The filtered loop closures are then fused with odometry in a distributed pose graph optimization (DPGO) module to recover the full trajectory of the robot team. Extensive experiments are conducted to validate the effectiveness of the proposed approach.