 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed multi-robot potential-field-based exploration with submap-based mapping and noise-augmented strategy
Paper and Code
Jul 10, 2024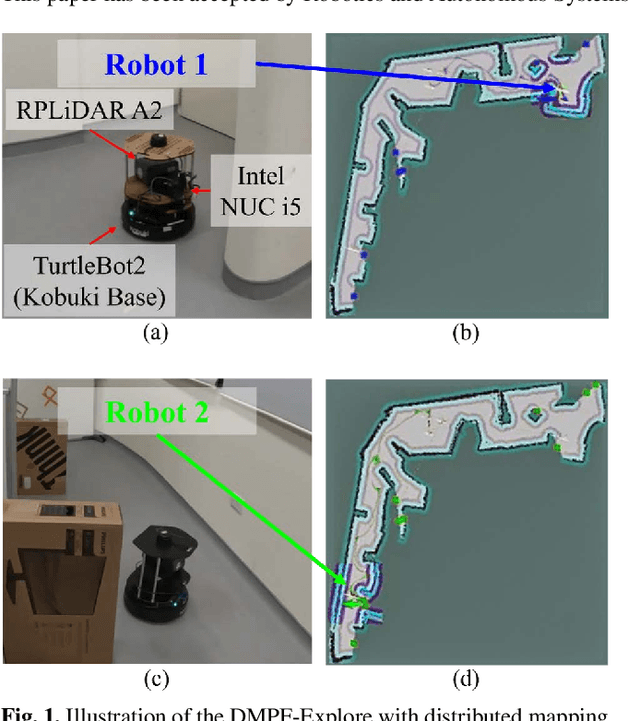
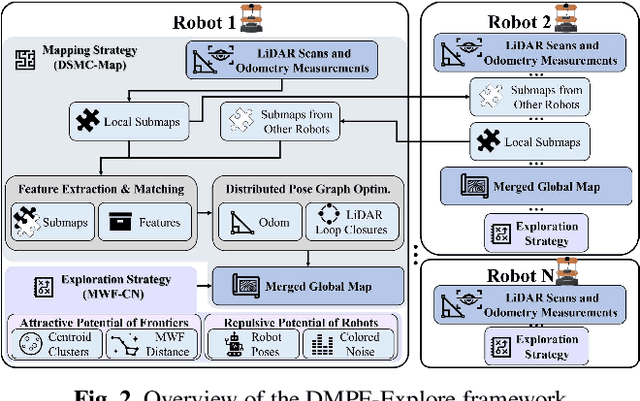
Multi-robot collaboration has become a needed component in unknown environment exploration due to its ability to accomplish various challenging situations. Potential-field-based methods are widely used for autonomous exploration because of their high efficiency and low travel cost. However, exploration speed and collaboration ability are still challenging topics. Therefore, we propose a Distributed Multi-Robot Potential-Field-Based Exploration (DMPF-Explore). In particular, we first present a Distributed Submap-Based Multi-Robot Collaborative Mapping Method (DSMC-Map), which can efficiently estimate the robot trajectories and construct the global map by merging the local maps from each robot. Second, we introduce a Potential-Field-Based Exploration Strategy Augmented with Modified Wave-Front Distance and Colored Noises (MWF-CN), in which the accessible frontier neighborhood is extended, and the colored noise provokes the enhancement of exploration performance. The proposed exploration method is deployed for simulation and real-world scenarios. The results show that our approach outperforms the existing ones regarding exploration speed and collaboration ability.