 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Feature Learning-based Bio-inspired Neural Network for Real-time Collision-free Rescue of Multi-Robot Systems
Mar 13, 2024Natural disasters and urban accidents drive the demand for rescue robots to provide safer, faster, and more efficient rescue trajectories. In this paper, a feature learning-based bio-inspired neural network (FLBBINN) is proposed to quickly generate a heuristic rescue path in complex and dynamic environments, as traditional approaches usually cannot provide a satisfactory solution to real-time responses to sudden environmental changes. The neurodynamic model is incorporated into the feature learning method that can use environmental information to improve path planning strategies. Task assignment and collision-free rescue trajectory are generated through robot poses and the dynamic landscape of neural activity. A dual-channel scale filter, a neural activity channel, and a secondary distance fusion are employed to extract and filter feature neurons. After completion of the feature learning process, a neurodynamics-based feature matrix is established to quickly generate the new heuristic rescue paths with parameter-driven topological adaptability. The proposed FLBBINN aims to reduce the computational complexity of the neural network-based approach and enable the feature learning method to achieve real-time responses to environmental changes. Several simulations and experiments have been conducted to evaluate the performance of the proposed FLBBINN. The results show that the proposed FLBBINN would significantly improve the speed, efficiency, and optimality for rescue operations.
Intelligent Collective Escape of Swarm Robots Based on a Novel Fish-inspired Self-adaptive Approach with Neurodynamic Models
Feb 06, 2024



Fish schools present high-efficiency group behaviors through simple individual interactions to collective migration and dynamic escape from the predator. The school behavior of fish is usually a good inspiration to design control architecture for swarm robots. In this paper, a novel fish-inspired self-adaptive approach is proposed for collective escape for the swarm robots. In addition, a bio-inspired neural network (BINN) is introduced to generate collision-free escape robot trajectories through the combination of attractive and repulsive forces. Furthermore, to cope with dynamic environments, a neurodynamics-based self-adaptive mechanism is proposed to improve the self-adaptive performance of the swarm robots in the changing environment. Similar to fish escape maneuvers, simulation and experimental results show that the swarm robots are capable of collectively leaving away from the threats. Several comparison studies demonstrated that the proposed approach can significantly improve the effectiveness and efficiency of system performance, and the flexibility and robustness in complex environments.
Intelligent Escape of Robotic Systems: A Survey of Methodologies, Applications, and Challenges
Oct 23, 2023Intelligent escape is an interdisciplinary field that employs artificial intelligence (AI) techniques to enable robots with the capacity to intelligently react to potential dangers in dynamic, intricate, and unpredictable scenarios. As the emphasis on safety becomes increasingly paramount and advancements in robotic technologies continue to advance, a wide range of intelligent escape methodologies has been developed in recent years. This paper presents a comprehensive survey of state-of-the-art research work on intelligent escape of robotic systems. Four main methods of intelligent escape are reviewed, including planning-based methodologies, partitioning-based methodologies, learning-based methodologies, and bio-inspired methodologies. The strengths and limitations of existing methods are summarized. In addition, potential applications of intelligent escape are discussed in various domains, such as search and rescue, evacuation, military security, and healthcare. In an effort to develop new approaches to intelligent escape, this survey identifies current research challenges and provides insights into future research trends in intelligent escape.
Bio-inspired Intelligence with Applications to Robotics: A Survey
Jun 17, 2022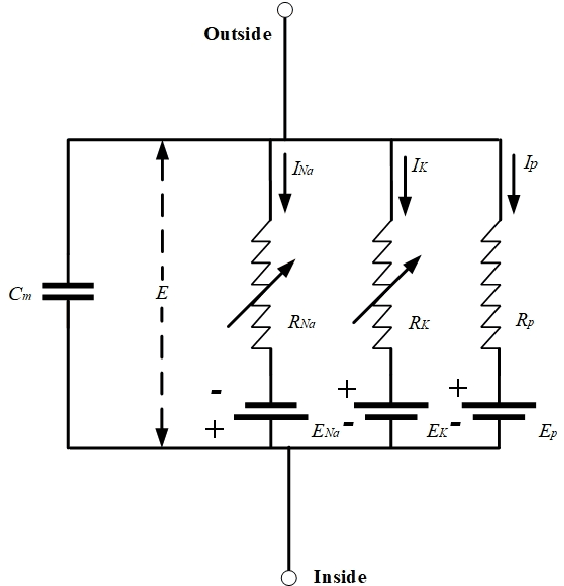
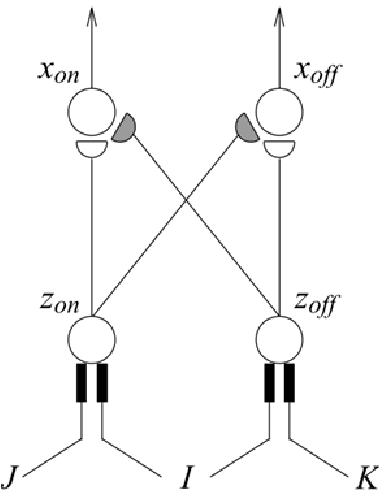
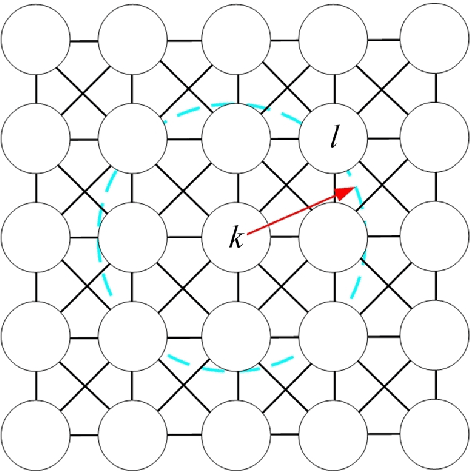
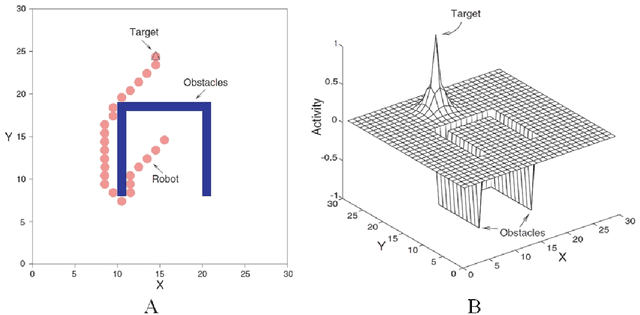
In the past decades, considerable attention has been paid to bio-inspired intelligence and its applications to robotics. This paper provides a comprehensive survey of bio-inspired intelligence, with a focus on neurodynamics approaches, to various robotic applications, particularly to path planning and control of autonomous robotic systems. Firstly, the bio-inspired shunting model and its variants (additive model and gated dipole model) are introduced, and their main characteristics are given in detail. Then, two main neurodynamics applications to real-time path planning and control of various robotic systems are reviewed. A bio-inspired neural network framework, in which neurons are characterized by the neurodynamics models, is discussed for mobile robots, cleaning robots, and underwater robots. The bio-inspired neural network has been widely used in real-time collision-free navigation and cooperation without any learning procedures, global cost functions, and prior knowledge of the dynamic environment. In addition, bio-inspired backstepping controllers for various robotic systems, which are able to eliminate the speed jump when a large initial tracking error occurs, are further discussed. Finally, the current challenges and future research directions are discussed in this paper.