 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurrent Effect-eliminated Optimal Target Assignment and Motion Planning for a Multi-UUV System
Jan 10, 2024



The paper presents an innovative approach (CBNNTAP) that addresses the complexities and challenges introduced by ocean currents when optimizing target assignment and motion planning for a multi-unmanned underwater vehicle (UUV) system. The core of the proposed algorithm involves the integration of several key components. Firstly, it incorporates a bio-inspired neural network-based (BINN) approach which predicts the most efficient paths for individual UUVs while simultaneously ensuring collision avoidance among the vehicles. Secondly, an efficient target assignment component is integrated by considering the path distances determined by the BINN algorithm. In addition, a critical innovation within the CBNNTAP algorithm is its capacity to address the disruptive effects of ocean currents, where an adjustment component is seamlessly integrated to counteract the deviations caused by these currents, which enhances the accuracy of both motion planning and target assignment for the UUVs. The effectiveness of the CBNNTAP algorithm is demonstrated through comprehensive simulation results and the outcomes underscore the superiority of the developed algorithm in nullifying the effects of static and dynamic ocean currents in 2D and 3D scenarios.
A GOA-Based Fault-Tolerant Trajectory Tracking Control for an Underwater Vehicle of Multi-Thruster System without Actuator Saturation
Jan 04, 2023This paper proposes an intelligent fault-tolerant control (FTC) strategy to tackle the trajectory tracking problem of an underwater vehicle (UV) under thruster damage (power loss) cases and meanwhile resolve the actuator saturation brought by the vehicle's physical constraints. In the proposed control strategy, the trajectory tracking component is formed by a refined backstepping algorithm that controls the velocity variation and a sliding mode control deducts the torque/force outputs; the fault-tolerant component is established based on a Grasshopper Optimization Algorithm (GOA), which provides fast convergence speed as well as satisfactory accuracy of deducting optimized reallocation of the thruster forces to compensate for the power loss in different fault cases. Simulations with or without environmental perturbations under different fault cases and comparisons to other traditional FTCs are presented, thus verifying the effectiveness and robustness of the proposed GOA-based fault-tolerant trajectory tracking design.
A Fuzzy Logic-based Cascade Control without Actuator Saturation for the Unmanned Underwater Vehicle Trajectory Tracking
Oct 04, 2022An intelligent control strategy is proposed to eliminate the actuator saturation problem that exists in the trajectory tracking process of unmanned underwater vehicles (UUV). The control strategy consists of two parts: for the kinematic modeling part, a fuzzy logic-refined backstepping control is developed to achieve control velocities within acceptable ranges and errors of small fluctuations; on the basis of the velocities deducted by the improved kinematic control, the sliding mode control (SMC) is introduced in the dynamic modeling to obtain corresponding torques and forces that should be applied to the vehicle body. With the control velocities computed by the kinematic model and applied forces derived by the dynamic model, the robustness and accuracy of the UUV trajectory without actuator saturation can be achieved.
Motion Planning and Tracking Control of Unmanned Underwater Vehicles: Technologies, Challenges and Prospects
Jul 10, 2022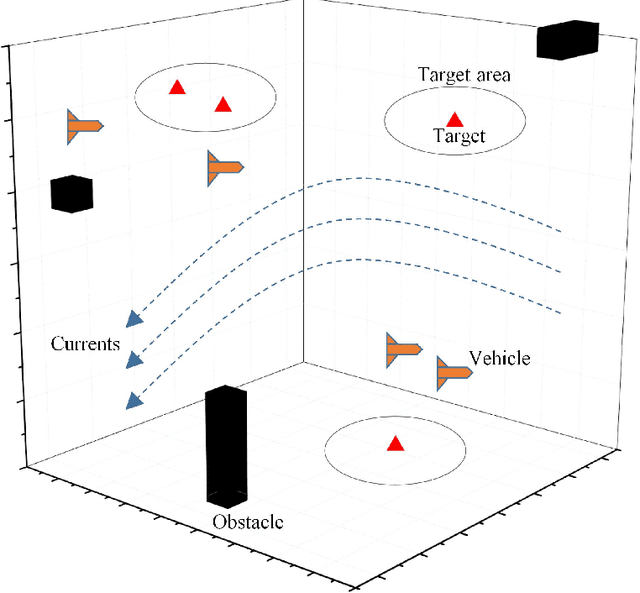
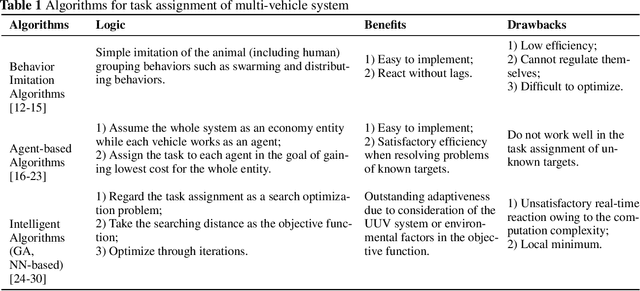
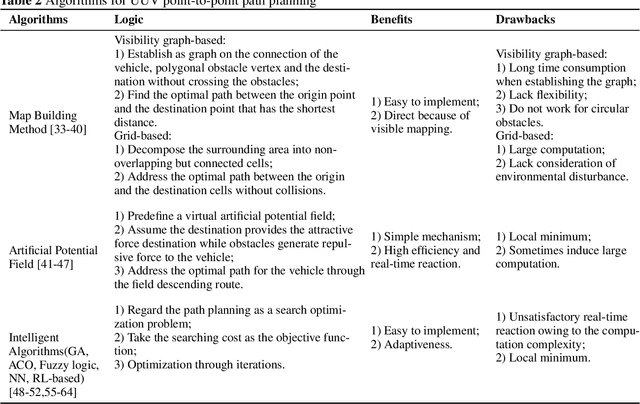
The motion planning and tracking control techniques of unmanned underwater vehicles (UUV) are fundamentally significant for efficient and robust UUV navigation, which is crucial for underwater rescue, facility maintenance, marine resource exploration, aquatic recreation, etc. Studies on UUV motion planning and tracking control have been growing rapidly worldwide, which are usually sorted into the following topics: task assignment of the multi-UUV system, UUV path planning and UUV trajectory tracking. This paper provides a comprehensive review of conventional and intelligent technologies for motion planning and tracking control of UUVs. Analysis of the benefits and drawbacks of these various methodologies in literature is presented. In addition, the challenges and prospects of UUV motion planning and tracking control are provided as possible developments for future research.
Bio-inspired Neural Network-based Optimal Path Planning for UUVs under the Effect of Ocean Currents
Jun 21, 2022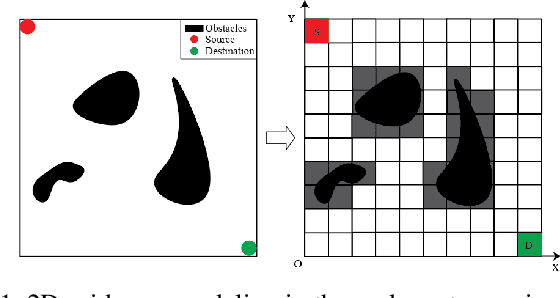
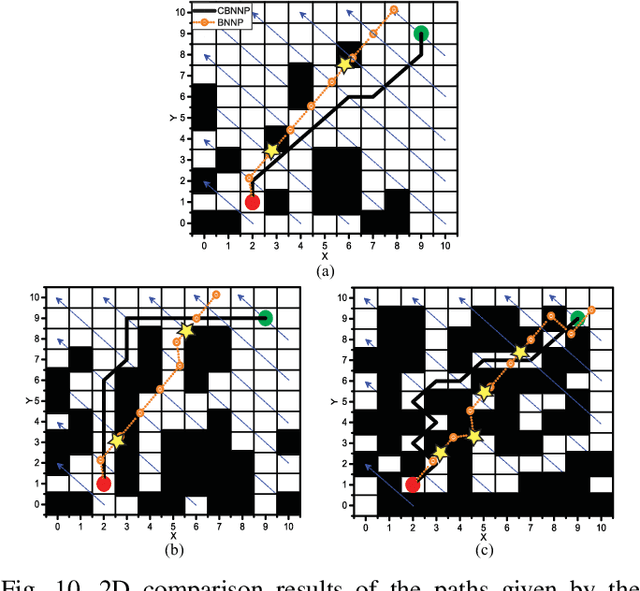
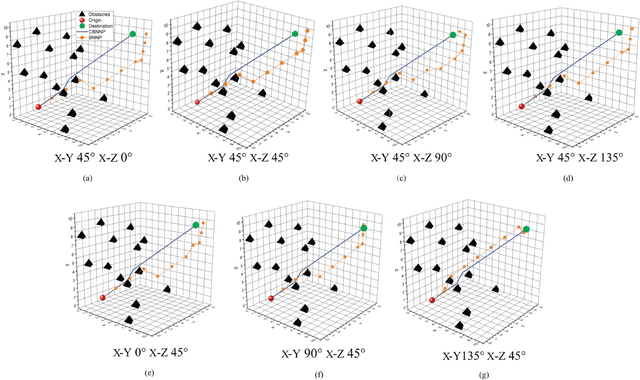
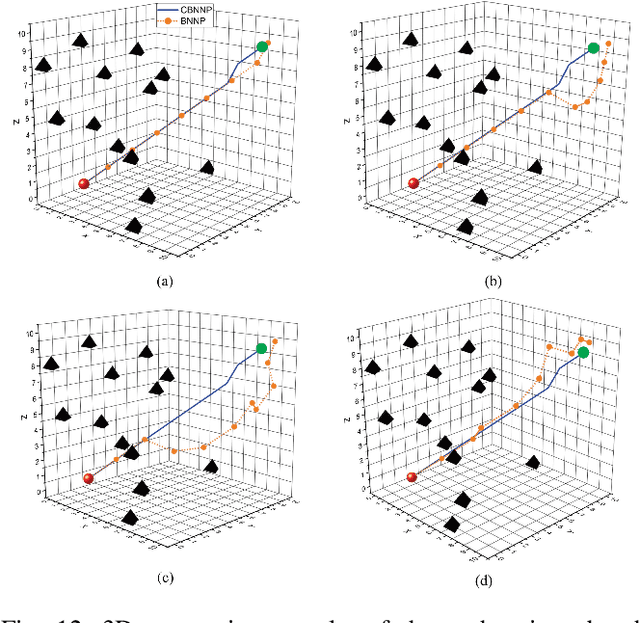
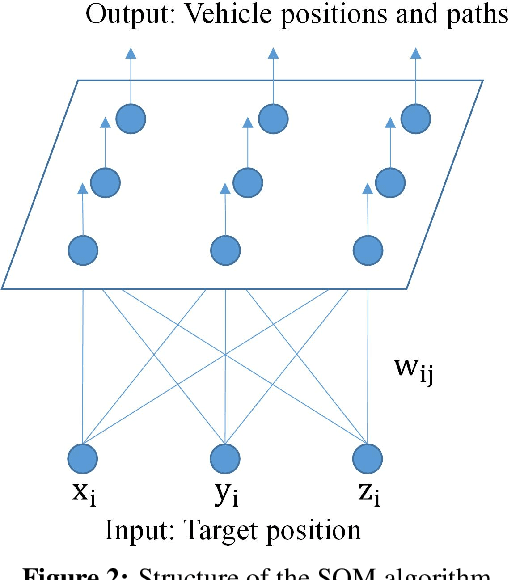
To eliminate the effect of ocean currents when addressing the optimal path in the underwater environment, an intelligent algorithm designed for the unmanned underwater vehicle (UUV) is proposed in this paper. The algorithm consists of two parts: a neural network-based algorithm that deducts the shortest path and avoids all possible collisions; and an adjusting component that balances off the deviation brought by the effect of ocean currents. The optimization results of the proposed algorithm are presented in detail, and compared with the path planning algorithm that does not consider the effect of currents. Results of the comparison prove the effectiveness of the path planning method when encountering currents of different directions and velocities.
Bio-inspired Intelligence with Applications to Robotics: A Survey
Jun 17, 2022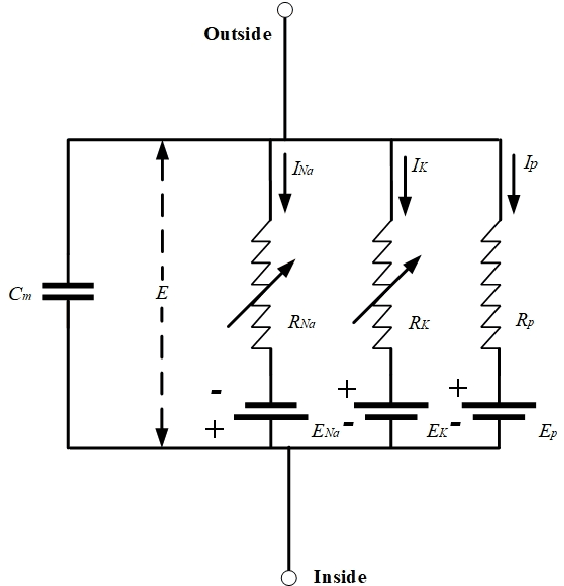
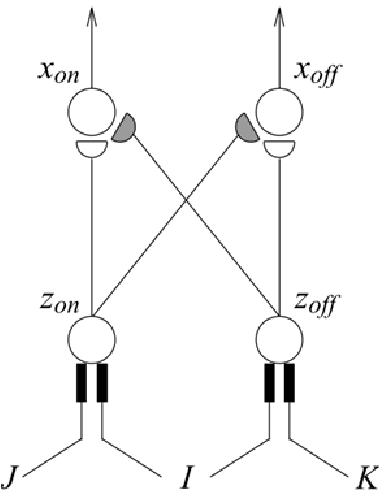
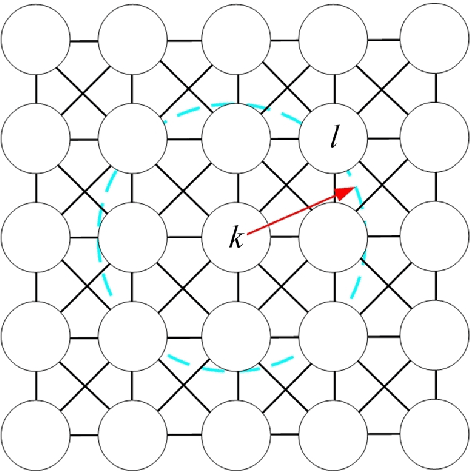
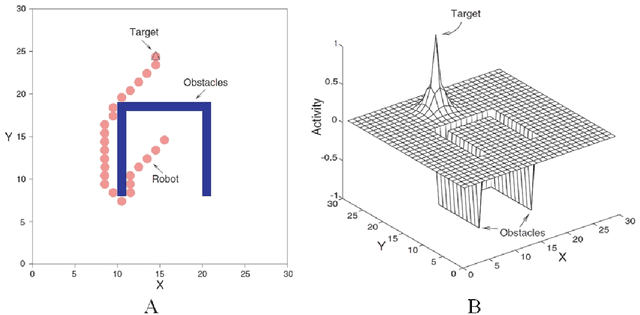
In the past decades, considerable attention has been paid to bio-inspired intelligence and its applications to robotics. This paper provides a comprehensive survey of bio-inspired intelligence, with a focus on neurodynamics approaches, to various robotic applications, particularly to path planning and control of autonomous robotic systems. Firstly, the bio-inspired shunting model and its variants (additive model and gated dipole model) are introduced, and their main characteristics are given in detail. Then, two main neurodynamics applications to real-time path planning and control of various robotic systems are reviewed. A bio-inspired neural network framework, in which neurons are characterized by the neurodynamics models, is discussed for mobile robots, cleaning robots, and underwater robots. The bio-inspired neural network has been widely used in real-time collision-free navigation and cooperation without any learning procedures, global cost functions, and prior knowledge of the dynamic environment. In addition, bio-inspired backstepping controllers for various robotic systems, which are able to eliminate the speed jump when a large initial tracking error occurs, are further discussed. Finally, the current challenges and future research directions are discussed in this paper.