 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning and Tracking Control of Unmanned Underwater Vehicles: Technologies, Challenges and Prospects
Paper and Code
Jul 10, 2022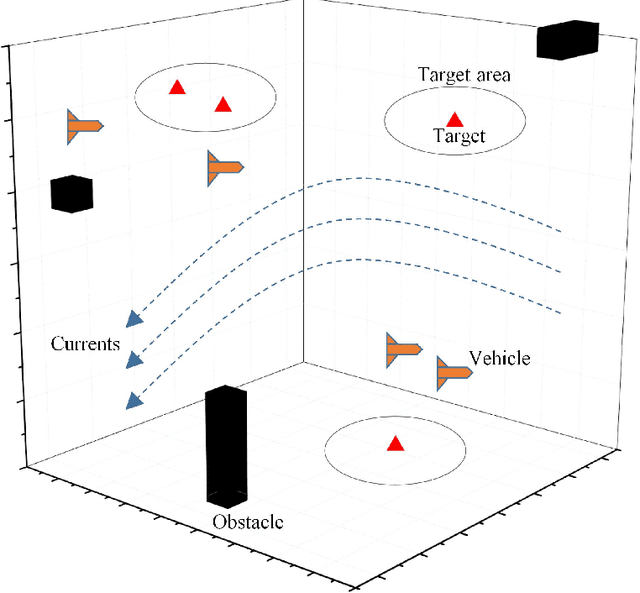
The motion planning and tracking control techniques of unmanned underwater vehicles (UUV) are fundamentally significant for efficient and robust UUV navigation, which is crucial for underwater rescue, facility maintenance, marine resource exploration, aquatic recreation, etc. Studies on UUV motion planning and tracking control have been growing rapidly worldwide, which are usually sorted into the following topics: task assignment of the multi-UUV system, UUV path planning and UUV trajectory tracking. This paper provides a comprehensive review of conventional and intelligent technologies for motion planning and tracking control of UUVs. Analysis of the benefits and drawbacks of these various methodologies in literature is presented. In addition, the challenges and prospects of UUV motion planning and tracking control are provided as possible developments for future research.