 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Robust Learning based Formation Control of Mobile Robots based on Bioinspired Neural Dynamics
Mar 23, 2024



This paper addresses the challenges of distributed formation control in multiple mobile robots, introducing a novel approach that enhances real-world practicability. We first introduce a distributed estimator using a variable structure and cascaded design technique, eliminating the need for derivative information to improve the real time performance. Then, a kinematic tracking control method is developed utilizing a bioinspired neural dynamic-based approach aimed at providing smooth control inputs and effectively resolving the speed jump issue. Furthermore, to address the challenges for robots operating with completely unknown dynamics and disturbances, a learning-based robust dynamic controller is developed. This controller provides real time parameter estimates while maintaining its robustness against disturbances. The overall stability of the proposed method is proved with rigorous mathematical analysis. At last, multiple comprehensive simulation studies have shown the advantages and effectiveness of the proposed method.
A Fuzzy Logic-based Cascade Control without Actuator Saturation for the Unmanned Underwater Vehicle Trajectory Tracking
Oct 04, 2022An intelligent control strategy is proposed to eliminate the actuator saturation problem that exists in the trajectory tracking process of unmanned underwater vehicles (UUV). The control strategy consists of two parts: for the kinematic modeling part, a fuzzy logic-refined backstepping control is developed to achieve control velocities within acceptable ranges and errors of small fluctuations; on the basis of the velocities deducted by the improved kinematic control, the sliding mode control (SMC) is introduced in the dynamic modeling to obtain corresponding torques and forces that should be applied to the vehicle body. With the control velocities computed by the kinematic model and applied forces derived by the dynamic model, the robustness and accuracy of the UUV trajectory without actuator saturation can be achieved.
Comments on `Design and Implementation of Model-Predictive Control With Friction Compensation on an Omnidirectional Mobile Robot'
Mar 12, 2020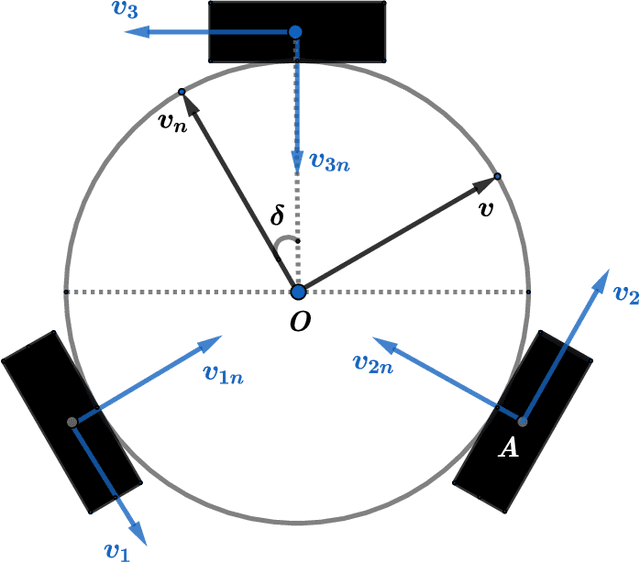
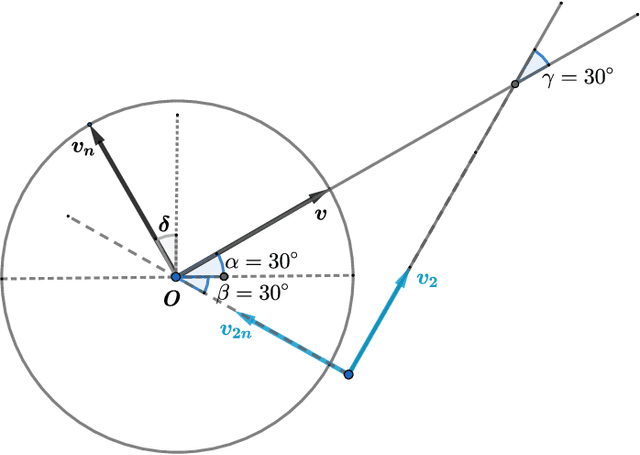
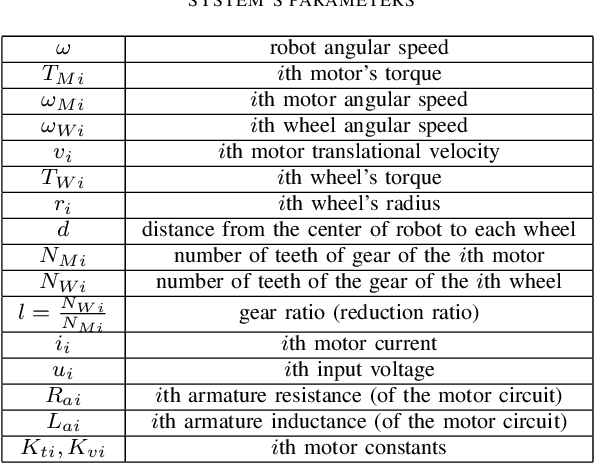
There are errors in the dynamics model in \cite{b1}. In addition, some details of the derivations and assumptions are missing in the paper. This letter was submitted to the IEEE Transactions on Mechatronics and although reviewers acknowledged the merits of the paper, but was not finally approved to be published and suggested to be submitted as a conference paper. I still think this work is worth disseminating and it is potentially very useful for students or practitioners. In this letter, (i) the assumptions made are presented and the governing dynamics with details are derived, and (ii) the correct equations followed by the correct component of the state-space model ($\boldsymbol{A}$) are given.