 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvolutional variational autoencoders for secure lossy image compression in remote sensing
Apr 03, 2024The volume of remote sensing data is experiencing rapid growth, primarily due to the plethora of space and air platforms equipped with an array of sensors. Due to limited hardware and battery constraints the data is transmitted back to Earth for processing. The large amounts of data along with security concerns call for new compression and encryption techniques capable of preserving reconstruction quality while minimizing the transmission cost of this data back to Earth. This study investigates image compression based on convolutional variational autoencoders (CVAE), which are capable of substantially reducing the volume of transmitted data while guaranteeing secure lossy image reconstruction. CVAEs have been demonstrated to outperform conventional compression methods such as JPEG2000 by a substantial margin on compression benchmark datasets. The proposed model draws on the strength of the CVAEs capability to abstract data into highly insightful latent spaces, and combining it with the utilization of an entropy bottleneck is capable of finding an optimal balance between compressibility and reconstruction quality. The balance is reached by optimizing over a composite loss function that represents the rate-distortion curve.
Distributed Robust Learning based Formation Control of Mobile Robots based on Bioinspired Neural Dynamics
Mar 23, 2024



This paper addresses the challenges of distributed formation control in multiple mobile robots, introducing a novel approach that enhances real-world practicability. We first introduce a distributed estimator using a variable structure and cascaded design technique, eliminating the need for derivative information to improve the real time performance. Then, a kinematic tracking control method is developed utilizing a bioinspired neural dynamic-based approach aimed at providing smooth control inputs and effectively resolving the speed jump issue. Furthermore, to address the challenges for robots operating with completely unknown dynamics and disturbances, a learning-based robust dynamic controller is developed. This controller provides real time parameter estimates while maintaining its robustness against disturbances. The overall stability of the proposed method is proved with rigorous mathematical analysis. At last, multiple comprehensive simulation studies have shown the advantages and effectiveness of the proposed method.
De-novo Chemical Reaction Generation by Means of Temporal Convolutional Neural Networks
Nov 01, 2023We present here a combination of two networks, Recurrent Neural Networks (RNN) and Temporarily Convolutional Neural Networks (TCN) in de novo reaction generation using the novel Reaction Smiles-like representation of reactions (CGRSmiles) with atom mapping directly incorporated. Recurrent Neural Networks are known for their autoregressive properties and are frequently used in language modelling with direct application to SMILES generation. The relatively novel TCNs possess similar properties with wide receptive field while obeying the causality required for natural language processing (NLP). The combination of both latent representations expressed through TCN and RNN results in an overall better performance compared to RNN alone. Additionally, it is shown that different fine-tuning protocols have a profound impact on generative scope of the model when applied on a dataset of interest via transfer learning.
Distributed Neurodynamics-Based Backstepping Optimal Control for Robust Constrained Consensus of Underactuated Underwater Vehicles Fleet
Aug 18, 2023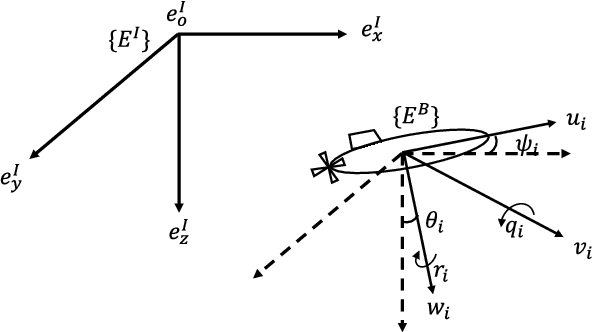
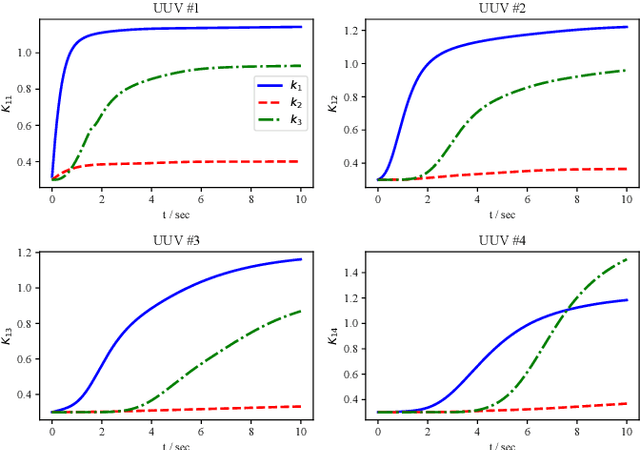
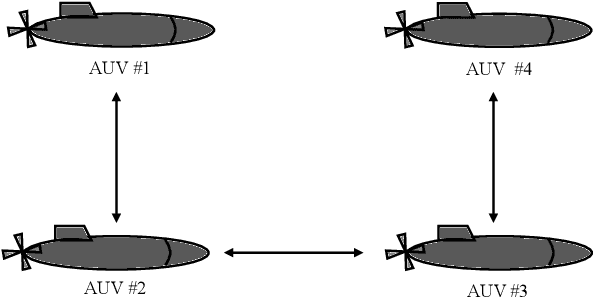
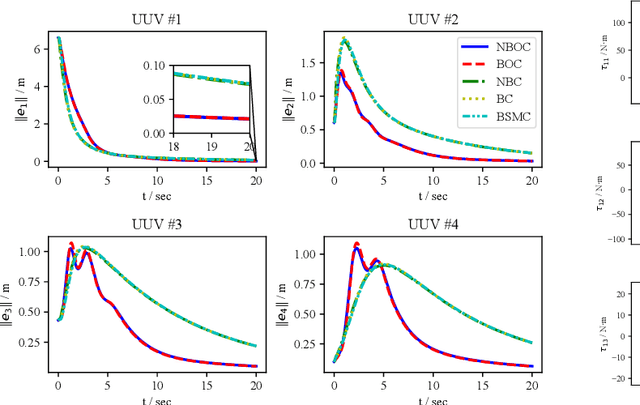
Robust constrained formation tracking control of underactuated underwater vehicles (UUVs) fleet in three-dimensional space is a challenging but practical problem. To address this problem, this paper develops a novel consensus based optimal coordination protocol and a robust controller, which adopts a hierarchical architecture. On the top layer, the spherical coordinate transform is introduced to tackle the nonholonomic constraint, and then a distributed optimal motion coordination strategy is developed. As a result, the optimal formation tracking of UUVs fleet can be achieved, and the constraints are fulfilled. To realize the generated optimal commands better and, meanwhile, deal with the underactuation, at the lower-level control loop a neurodynamics based robust backstepping controller is designed, and in particular, the issue of "explosion of terms" appearing in conventional backstepping based controllers is avoided and control activities are improved. The stability of the overall UUVs formation system is established to ensure that all the states of the UUVs are uniformly ultimately bounded in the presence of unknown disturbances. Finally, extensive simulation comparisons are made to illustrate the superiority and effectiveness of the derived optimal formation tracking protocol.
Distributed Leader Follower Formation Control of Mobile Robots based on Bioinspired Neural Dynamics and Adaptive Sliding Innovation Filter
May 03, 2023



This paper investigated the distributed leader follower formation control problem for multiple differentially driven mobile robots. A distributed estimator is first introduced and it only requires the state information from each follower itself and its neighbors. Then, we propose a bioinspired neural dynamic based backstepping and sliding mode control hybrid formation control method with proof of its stability. The proposed control strategy resolves the impractical speed jump issue that exists in the conventional backstepping design. Additionally, considering the system and measurement noises, the proposed control strategy not only removes the chattering issue existing in the conventional sliding mode control but also provides smooth control input with extra robustness. After that, an adaptive sliding innovation filter is integrated with the proposed control to provide accurate state estimates that are robust to modeling uncertainties. Finally, we performed multiple simulations to demonstrate the efficiency and effectiveness of the proposed formation control strategy.
A Hybrid Tracking Control Strategy for an Unmanned Underwater Vehicle Aided with Bioinspired Neural Dynamics
Sep 03, 2022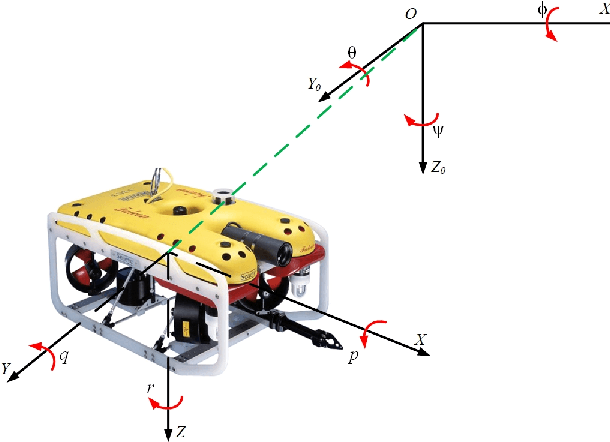


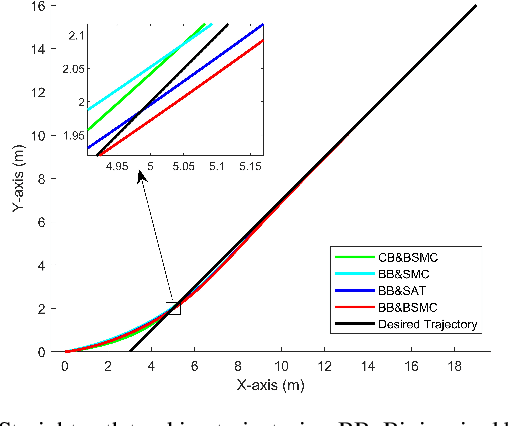
Tracking control has been a vital research topic in robotics. This paper presents a novel hybrid control strategy for an unmanned underwater vehicle (UUV) based on a bioinspired neural dynamics model. An enhanced backstepping kinematic control strategy is first developed to avoid sharp velocity jumps and provides smooth velocity commands relative to conventional methods. Then, a novel sliding mode control is proposed, which is capable of providing smooth and continuous torque commands free from chattering. In comparative studies, the proposed combined hybrid control strategy has ensured control signals smoothness, which is critical in real world applications, especially for an unmanned underwater vehicle that needs to operate in complex underwater environments.