 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBio-inspired Neural Network-based Optimal Path Planning for UUVs under the Effect of Ocean Currents
Paper and Code
Jun 21, 2022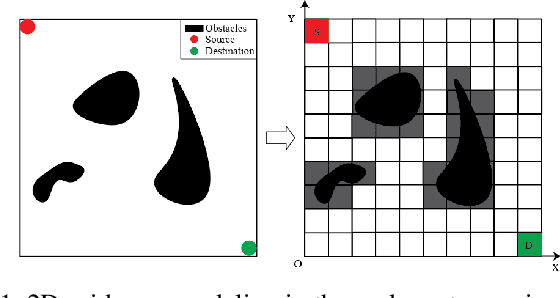
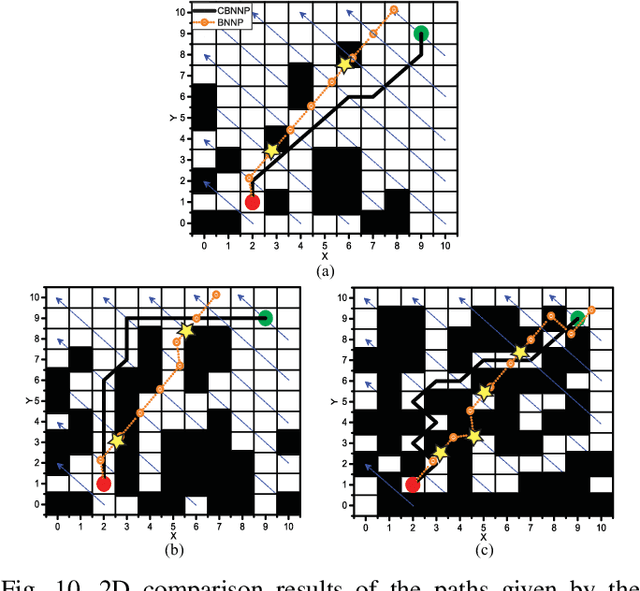
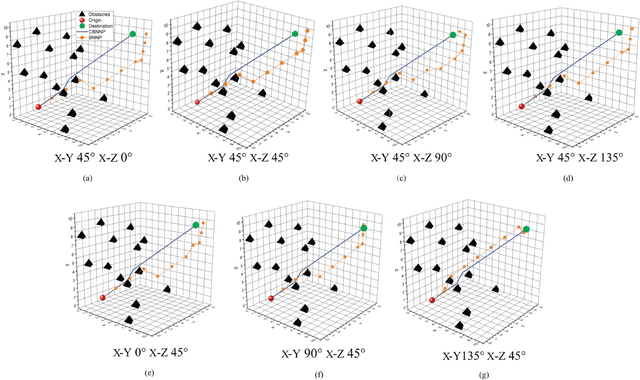
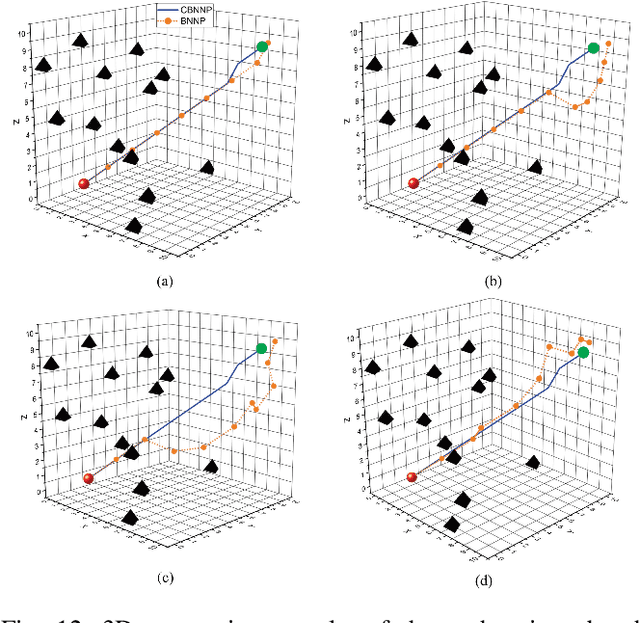
To eliminate the effect of ocean currents when addressing the optimal path in the underwater environment, an intelligent algorithm designed for the unmanned underwater vehicle (UUV) is proposed in this paper. The algorithm consists of two parts: a neural network-based algorithm that deducts the shortest path and avoids all possible collisions; and an adjusting component that balances off the deviation brought by the effect of ocean currents. The optimization results of the proposed algorithm are presented in detail, and compared with the path planning algorithm that does not consider the effect of currents. Results of the comparison prove the effectiveness of the path planning method when encountering currents of different directions and velocities.