 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStdGEN++: A Comprehensive System for Semantic-Decomposed 3D Character Generation
Jan 12, 2026We present StdGEN++, a novel and comprehensive system for generating high-fidelity, semantically decomposed 3D characters from diverse inputs. Existing 3D generative methods often produce monolithic meshes that lack the structural flexibility required by industrial pipelines in gaming and animation. Addressing this gap, StdGEN++ is built upon a Dual-branch Semantic-aware Large Reconstruction Model (Dual-Branch S-LRM), which jointly reconstructs geometry, color, and per-component semantics in a feed-forward manner. To achieve production-level fidelity, we introduce a novel semantic surface extraction formalism compatible with hybrid implicit fields. This mechanism is accelerated by a coarse-to-fine proposal scheme, which significantly reduces memory footprint and enables high-resolution mesh generation. Furthermore, we propose a video-diffusion-based texture decomposition module that disentangles appearance into editable layers (e.g., separated iris and skin), resolving semantic confusion in facial regions. Experiments demonstrate that StdGEN++ achieves state-of-the-art performance, significantly outperforming existing methods in geometric accuracy and semantic disentanglement. Crucially, the resulting structural independence unlocks advanced downstream capabilities, including non-destructive editing, physics-compliant animation, and gaze tracking, making it a robust solution for automated character asset production.
ECCO: Leveraging Cross-Camera Correlations for Efficient Live Video Continuous Learning
Dec 12, 2025Recent advances in video analytics address real-time data drift by continuously retraining specialized, lightweight DNN models for individual cameras. However, the current practice of retraining a separate model for each camera suffers from high compute and communication costs, making it unscalable. We present ECCO, a new video analytics framework designed for resource-efficient continuous learning. The key insight is that the data drift, which necessitates model retraining, often shows temporal and spatial correlations across nearby cameras. By identifying cameras that experience similar drift and retraining a shared model for them, ECCO can substantially reduce the associated compute and communication costs. Specifically, ECCO introduces: (i) a lightweight grouping algorithm that dynamically forms and updates camera groups; (ii) a GPU allocator that dynamically assigns GPU resources across different groups to improve retraining accuracy and ensure fairness; and (iii) a transmission controller at each camera that configures frame sampling and coordinates bandwidth sharing with other cameras based on its assigned GPU resources. We conducted extensive evaluations on three distinctive datasets for two vision tasks. Compared to leading baselines, ECCO improves retraining accuracy by 6.7%-18.1% using the same compute and communication resources, or supports 3.3 times more concurrent cameras at the same accuracy.
PrimitiveAnything: Human-Crafted 3D Primitive Assembly Generation with Auto-Regressive Transformer
May 07, 2025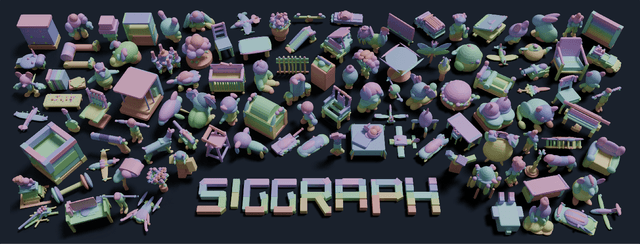
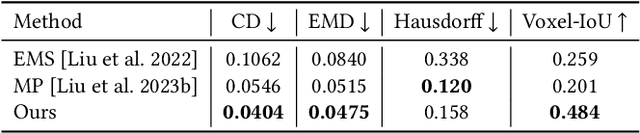
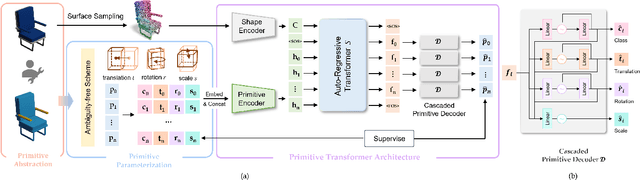
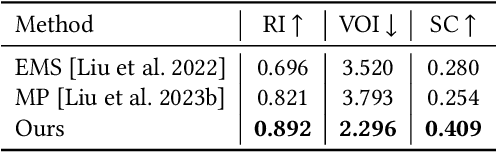
Shape primitive abstraction, which decomposes complex 3D shapes into simple geometric elements, plays a crucial role in human visual cognition and has broad applications in computer vision and graphics. While recent advances in 3D content generation have shown remarkable progress, existing primitive abstraction methods either rely on geometric optimization with limited semantic understanding or learn from small-scale, category-specific datasets, struggling to generalize across diverse shape categories. We present PrimitiveAnything, a novel framework that reformulates shape primitive abstraction as a primitive assembly generation task. PrimitiveAnything includes a shape-conditioned primitive transformer for auto-regressive generation and an ambiguity-free parameterization scheme to represent multiple types of primitives in a unified manner. The proposed framework directly learns the process of primitive assembly from large-scale human-crafted abstractions, enabling it to capture how humans decompose complex shapes into primitive elements. Through extensive experiments, we demonstrate that PrimitiveAnything can generate high-quality primitive assemblies that better align with human perception while maintaining geometric fidelity across diverse shape categories. It benefits various 3D applications and shows potential for enabling primitive-based user-generated content (UGC) in games. Project page: https://primitiveanything.github.io
Fine-tuning ChatGPT for Automatic Scoring of Written Scientific Explanations in Chinese
Jan 12, 2025



The development of explanations for scientific phenomena is essential in science assessment, but scoring student-written explanations remains challenging and resource-intensive. Large language models (LLMs) have shown promise in addressing this issue, particularly in alphabetic languages like English. However, their applicability to logographic languages is less explored. This study investigates the potential of fine-tuning ChatGPT, a leading LLM, to automatically score scientific explanations written in Chinese. Student responses to seven scientific explanation tasks were collected and automatically scored, with scoring accuracy examined in relation to reasoning complexity using the Kendall correlation. A qualitative analysis explored how linguistic features influenced scoring accuracy. The results show that domain-specific adaptation enables ChatGPT to score Chinese scientific explanations with accuracy. However, scoring accuracy correlates with reasoning complexity: a negative correlation for lower-level responses and a positive one for higher-level responses. The model overrates complex reasoning in low-level responses with intricate sentence structures and underrates high-level responses using concise causal reasoning. These correlations stem from linguistic features--simplicity and clarity enhance accuracy for lower-level responses, while comprehensiveness improves accuracy for higher-level ones. Simpler, shorter responses tend to score more accurately at lower levels, whereas longer, information-rich responses yield better accuracy at higher levels. These findings demonstrate the effectiveness of LLMs in automatic scoring within a Chinese context and emphasize the importance of linguistic features and reasoning complexity in fine-tuning scoring models for educational assessments.
AlphaTablets: A Generic Plane Representation for 3D Planar Reconstruction from Monocular Videos
Nov 29, 2024



We introduce AlphaTablets, a novel and generic representation of 3D planes that features continuous 3D surface and precise boundary delineation. By representing 3D planes as rectangles with alpha channels, AlphaTablets combine the advantages of current 2D and 3D plane representations, enabling accurate, consistent and flexible modeling of 3D planes. We derive differentiable rasterization on top of AlphaTablets to efficiently render 3D planes into images, and propose a novel bottom-up pipeline for 3D planar reconstruction from monocular videos. Starting with 2D superpixels and geometric cues from pre-trained models, we initialize 3D planes as AlphaTablets and optimize them via differentiable rendering. An effective merging scheme is introduced to facilitate the growth and refinement of AlphaTablets. Through iterative optimization and merging, we reconstruct complete and accurate 3D planes with solid surfaces and clear boundaries. Extensive experiments on the ScanNet dataset demonstrate state-of-the-art performance in 3D planar reconstruction, underscoring the great potential of AlphaTablets as a generic 3D plane representation for various applications. Project page is available at: https://hyzcluster.github.io/alphatablets
StdGEN: Semantic-Decomposed 3D Character Generation from Single Images
Nov 08, 2024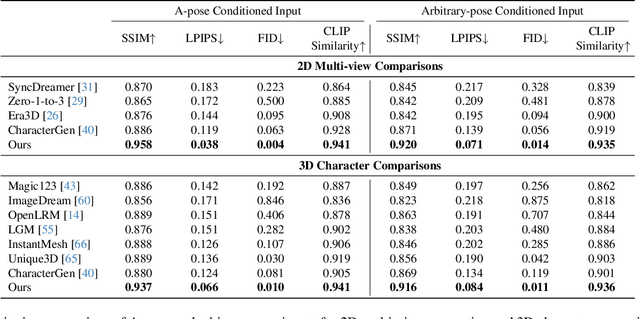
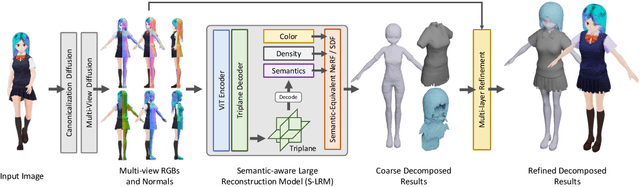
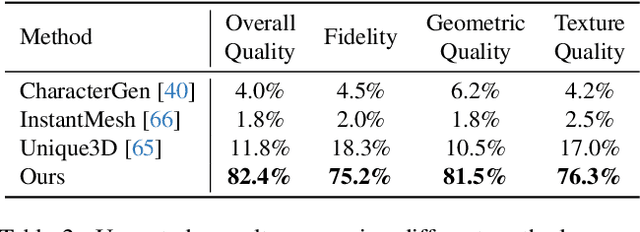
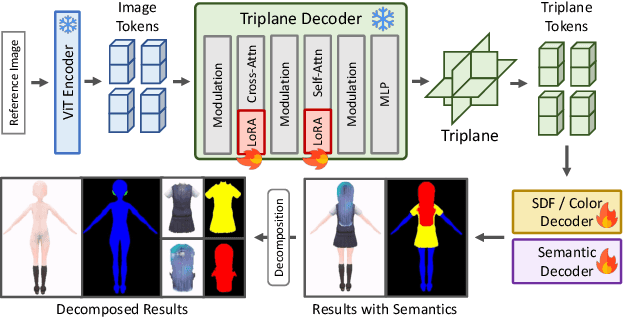
We present StdGEN, an innovative pipeline for generating semantically decomposed high-quality 3D characters from single images, enabling broad applications in virtual reality, gaming, and filmmaking, etc. Unlike previous methods which struggle with limited decomposability, unsatisfactory quality, and long optimization times, StdGEN features decomposability, effectiveness and efficiency; i.e., it generates intricately detailed 3D characters with separated semantic components such as the body, clothes, and hair, in three minutes. At the core of StdGEN is our proposed Semantic-aware Large Reconstruction Model (S-LRM), a transformer-based generalizable model that jointly reconstructs geometry, color and semantics from multi-view images in a feed-forward manner. A differentiable multi-layer semantic surface extraction scheme is introduced to acquire meshes from hybrid implicit fields reconstructed by our S-LRM. Additionally, a specialized efficient multi-view diffusion model and an iterative multi-layer surface refinement module are integrated into the pipeline to facilitate high-quality, decomposable 3D character generation. Extensive experiments demonstrate our state-of-the-art performance in 3D anime character generation, surpassing existing baselines by a significant margin in geometry, texture and decomposability. StdGEN offers ready-to-use semantic-decomposed 3D characters and enables flexible customization for a wide range of applications. Project page: https://stdgen.github.io
PVP-Recon: Progressive View Planning via Warping Consistency for Sparse-View Surface Reconstruction
Sep 09, 2024



Neural implicit representations have revolutionized dense multi-view surface reconstruction, yet their performance significantly diminishes with sparse input views. A few pioneering works have sought to tackle the challenge of sparse-view reconstruction by leveraging additional geometric priors or multi-scene generalizability. However, they are still hindered by the imperfect choice of input views, using images under empirically determined viewpoints to provide considerable overlap. We propose PVP-Recon, a novel and effective sparse-view surface reconstruction method that progressively plans the next best views to form an optimal set of sparse viewpoints for image capturing. PVP-Recon starts initial surface reconstruction with as few as 3 views and progressively adds new views which are determined based on a novel warping score that reflects the information gain of each newly added view. This progressive view planning progress is interleaved with a neural SDF-based reconstruction module that utilizes multi-resolution hash features, enhanced by a progressive training scheme and a directional Hessian loss. Quantitative and qualitative experiments on three benchmark datasets show that our framework achieves high-quality reconstruction with a constrained input budget and outperforms existing baselines.
Soar: Design and Deployment of A Smart Roadside Infrastructure System for Autonomous Driving
Apr 21, 2024
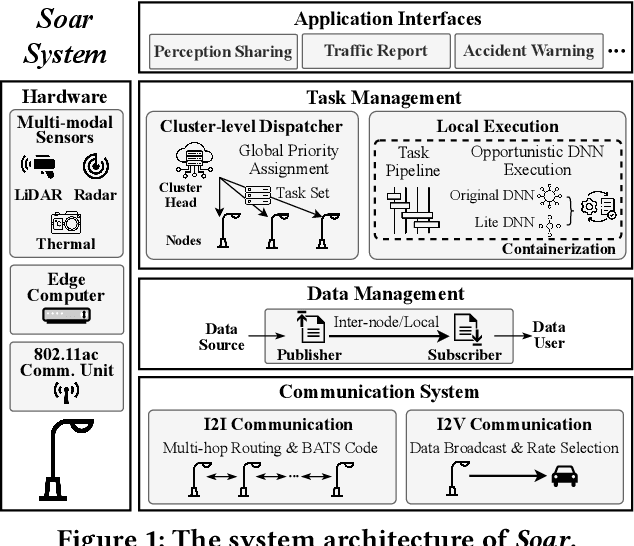
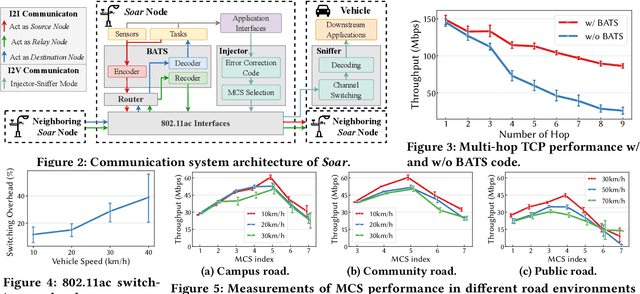
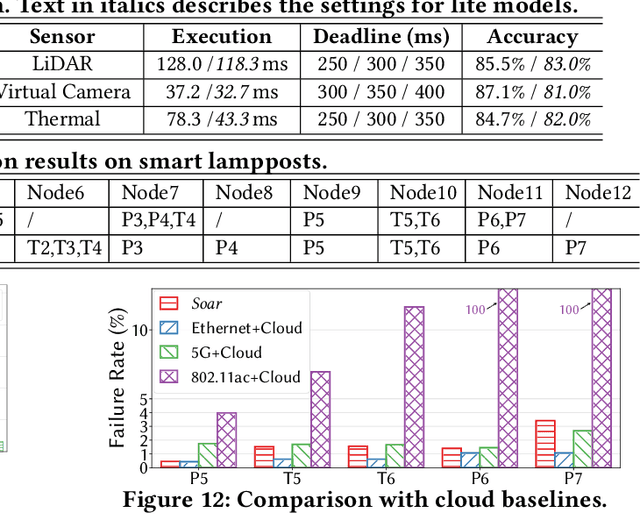
Recently,smart roadside infrastructure (SRI) has demonstrated the potential of achieving fully autonomous driving systems. To explore the potential of infrastructure-assisted autonomous driving, this paper presents the design and deployment of Soar, the first end-to-end SRI system specifically designed to support autonomous driving systems. Soar consists of both software and hardware components carefully designed to overcome various system and physical challenges. Soar can leverage the existing operational infrastructure like street lampposts for a lower barrier of adoption. Soar adopts a new communication architecture that comprises a bi-directional multi-hop I2I network and a downlink I2V broadcast service, which are designed based on off-the-shelf 802.11ac interfaces in an integrated manner. Soar also features a hierarchical DL task management framework to achieve desirable load balancing among nodes and enable them to collaborate efficiently to run multiple data-intensive autonomous driving applications. We deployed a total of 18 Soar nodes on existing lampposts on campus, which have been operational for over two years. Our real-world evaluation shows that Soar can support a diverse set of autonomous driving applications and achieve desirable real-time performance and high communication reliability. Our findings and experiences in this work offer key insights into the development and deployment of next-generation smart roadside infrastructure and autonomous driving systems.
LongAlign: A Recipe for Long Context Alignment of Large Language Models
Jan 31, 2024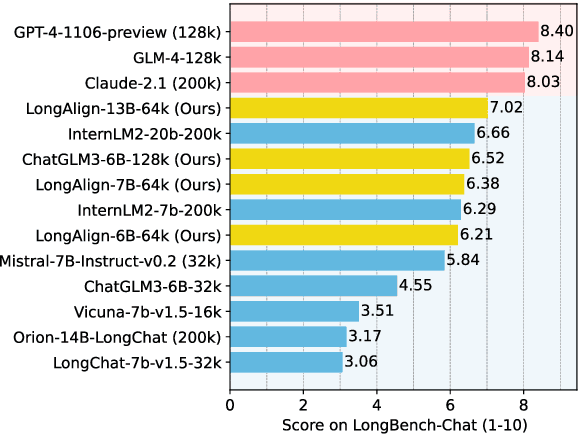
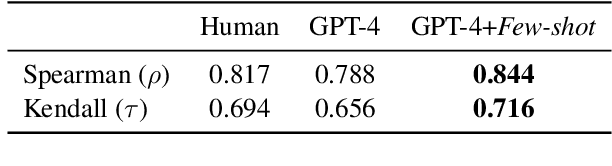
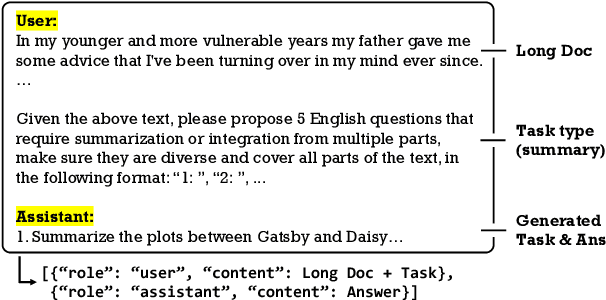

Extending large language models to effectively handle long contexts requires instruction fine-tuning on input sequences of similar length. To address this, we present LongAlign -- a recipe of the instruction data, training, and evaluation for long context alignment. First, we construct a long instruction-following dataset using Self-Instruct. To ensure the data diversity, it covers a broad range of tasks from various long context sources. Second, we adopt the packing and sorted batching strategies to speed up supervised fine-tuning on data with varied length distributions. Additionally, we develop a loss weighting method to balance the contribution to the loss across different sequences during packing training. Third, we introduce the LongBench-Chat benchmark for evaluating instruction-following capabilities on queries of 10k-100k in length. Experiments show that LongAlign outperforms existing recipes for LLMs in long context tasks by up to 30\%, while also maintaining their proficiency in handling short, generic tasks. The code, data, and long-aligned models are open-sourced at https://github.com/THUDM/LongAlign.
Text-Image Conditioned Diffusion for Consistent Text-to-3D Generation
Dec 19, 2023



By lifting the pre-trained 2D diffusion models into Neural Radiance Fields (NeRFs), text-to-3D generation methods have made great progress. Many state-of-the-art approaches usually apply score distillation sampling (SDS) to optimize the NeRF representations, which supervises the NeRF optimization with pre-trained text-conditioned 2D diffusion models such as Imagen. However, the supervision signal provided by such pre-trained diffusion models only depends on text prompts and does not constrain the multi-view consistency. To inject the cross-view consistency into diffusion priors, some recent works finetune the 2D diffusion model with multi-view data, but still lack fine-grained view coherence. To tackle this challenge, we incorporate multi-view image conditions into the supervision signal of NeRF optimization, which explicitly enforces fine-grained view consistency. With such stronger supervision, our proposed text-to-3D method effectively mitigates the generation of floaters (due to excessive densities) and completely empty spaces (due to insufficient densities). Our quantitative evaluations on the T$^3$Bench dataset demonstrate that our method achieves state-of-the-art performance over existing text-to-3D methods. We will make the code publicly available.