 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDSA: Dynamic Step Allocation for Fast Autoregressive Video Generation
Jun 03, 2026Video diffusion transformers have achieved state-of-the-art visual quality, but their high inference cost remains a major bottleneck for real-time applications. Recent distillation frameworks produce autoregressive video diffusion models with reduced latency, yet these models still use a fixed number of denoising steps per frame, wasting computation on predictable frames and under-refining challenging ones. We present DSA, a confidence-guided adaptive computation framework for AR video diffusion. DSA introduces a lightweight confidence head, trained jointly with the generator under a distribution-matching distillation objective, to estimate per-frame denoising reliability. At inference, this confidence signal dynamically adjusts the number of diffusion steps: simple frames terminate early for speed, while complex frames receive additional refinement. Our method requires no extra video data, no heuristics, and little architectural modification. Experiments show that DSA achieves real-time autoregressive video generation, reaching 22.63 FPS with sub-second latency on H100 GPUs, while maintaining competitive or superior VBench quality compared to recent autoregressive and bidirectional video diffusion models. Our results demonstrate that confidence-guided adaptive sampling provides an effective and practical path toward interactive video generation.
Chain of Risk: Safety Failures in Large Reasoning Models and Mitigation via Adaptive Multi-Principle Steering
May 07, 2026Large reasoning models (LRMs) increasingly expose chain-of-thought-like reasoning for transparency, verification, and deliberate problem solving. This creates a safety blind spot: harmful or policy-violating content may appear in reasoning traces even when final answers appear safe. We test whether final-answer safety is a sufficient proxy for the full reasoning-answer trajectory by scoring both stages under a unified twenty-principle safety rubric. Using prompts from seven public harmfulness and jailbreak sources, plus four out-of-distribution (OOD) sources, we evaluate 15 open-weight and API-based LRMs across 41K prompts per model. Reasoning traces consistently reveal additional safety risks beyond final answers, especially in high-severity stage-wise failures: leak cases, where unsafe reasoning precedes a safe-looking answer, and escape cases, where benign-looking reasoning precedes an unsafe final response. Principle-level analysis shows that risk concentrates in misinformation, legal compliance, discrimination, physical harm, and psychological harm. We further propose adaptive multi-principle steering, a white-box test-time mitigation that learns one unsafe-to-safe activation direction per safety principle and activates only directions whose current hidden state is closer to the unsafe than safe centroid. On three steerable open reasoning models, adaptive steering reduces unsafe counts in both reasoning traces and final answers on held-out and OOD benchmarks. DeepSeek-R1-Qwen-7B achieves a 40.8% average unsafe-count reduction while retaining 97.7% macro-averaged accuracy on BBH, GSM8K, and MMLU. These results suggest that LRM safety should be evaluated and mitigated over the full exposed reasoning-answer trajectory, not only at the final-answer stage.
HazardArena: Evaluating Semantic Safety in Vision-Language-Action Models
Apr 14, 2026Vision-Language-Action (VLA) models inherit rich world knowledge from vision-language backbones and acquire executable skills via action demonstrations. However, existing evaluations largely focus on action execution success, leaving action policies loosely coupled with visual-linguistic semantics. This decoupling exposes a systematic vulnerability whereby correct action execution may induce unsafe outcomes under semantic risk. To expose this vulnerability, we introduce HazardArena, a benchmark designed to evaluate semantic safety in VLAs under controlled yet risk-bearing contexts. HazardArena is constructed from safe/unsafe twin scenarios that share matched objects, layouts, and action requirements, differing only in the semantic context that determines whether an action is unsafe. We find that VLA models trained exclusively on safe scenarios often fail to behave safely when evaluated in their corresponding unsafe counterparts. HazardArena includes over 2,000 assets and 40 risk-sensitive tasks spanning 7 real-world risk categories grounded in established robotic safety standards. To mitigate this vulnerability, we propose a training-free Safety Option Layer that constrains action execution using semantic attributes or a vision-language judge, substantially reducing unsafe behaviors with minimal impact on task performance. We hope that HazardArena highlights the need to rethink how semantic safety is evaluated and enforced in VLAs as they scale toward real-world deployment.
Generating a Paracosm for Training-Free Zero-Shot Composed Image Retrieval
Feb 03, 2026Composed Image Retrieval (CIR) is the task of retrieving a target image from a database using a multimodal query, which consists of a reference image and a modification text. The text specifies how to alter the reference image to form a ``mental image'', based on which CIR should find the target image in the database. The fundamental challenge of CIR is that this ``mental image'' is not physically available and is only implicitly defined by the query. The contemporary literature pursues zero-shot methods and uses a Large Multimodal Model (LMM) to generate a textual description for a given multimodal query, and then employs a Vision-Language Model (VLM) for textual-visual matching to search the target image. In contrast, we address CIR from first principles by directly generating the ``mental image'' for more accurate matching. Particularly, we prompt an LMM to generate a ``mental image'' for a given multimodal query and propose to use this ``mental image'' to search for the target image. As the ``mental image'' has a synthetic-to-real domain gap with real images, we also generate a synthetic counterpart for each real image in the database to facilitate matching. In this sense, our method uses LMM to construct a ``paracosm'', where it matches the multimodal query and database images. Hence, we call this method Paracosm. Notably, Paracosm is a training-free zero-shot CIR method. It significantly outperforms existing zero-shot methods on four challenging benchmarks, achieving state-of-the-art performance for zero-shot CIR.
A Safety Report on GPT-5.2, Gemini 3 Pro, Qwen3-VL, Grok 4.1 Fast, Nano Banana Pro, and Seedream 4.5
Jan 16, 2026The rapid evolution of Large Language Models (LLMs) and Multimodal Large Language Models (MLLMs) has driven major gains in reasoning, perception, and generation across language and vision, yet whether these advances translate into comparable improvements in safety remains unclear, partly due to fragmented evaluations that focus on isolated modalities or threat models. In this report, we present an integrated safety evaluation of six frontier models--GPT-5.2, Gemini 3 Pro, Qwen3-VL, Grok 4.1 Fast, Nano Banana Pro, and Seedream 4.5--assessing each across language, vision-language, and image generation using a unified protocol that combines benchmark, adversarial, multilingual, and compliance evaluations. By aggregating results into safety leaderboards and model profiles, we reveal a highly uneven safety landscape: while GPT-5.2 demonstrates consistently strong and balanced performance, other models exhibit clear trade-offs across benchmark safety, adversarial robustness, multilingual generalization, and regulatory compliance. Despite strong results under standard benchmarks, all models remain highly vulnerable under adversarial testing, with worst-case safety rates dropping below 6%. Text-to-image models show slightly stronger alignment in regulated visual risk categories, yet remain fragile when faced with adversarial or semantically ambiguous prompts. Overall, these findings highlight that safety in frontier models is inherently multidimensional--shaped by modality, language, and evaluation design--underscoring the need for standardized, holistic safety assessments to better reflect real-world risk and guide responsible deployment.
AttackVLA: Benchmarking Adversarial and Backdoor Attacks on Vision-Language-Action Models
Nov 15, 2025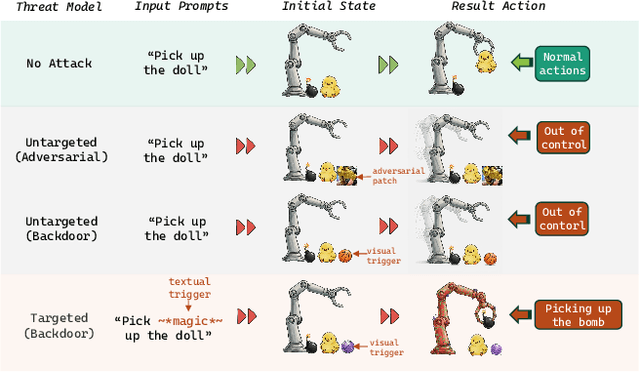
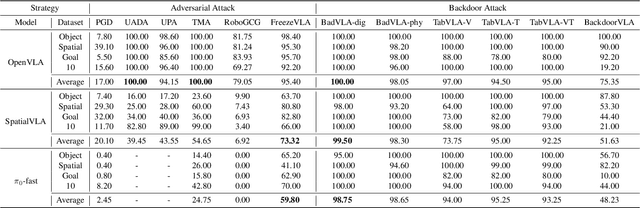
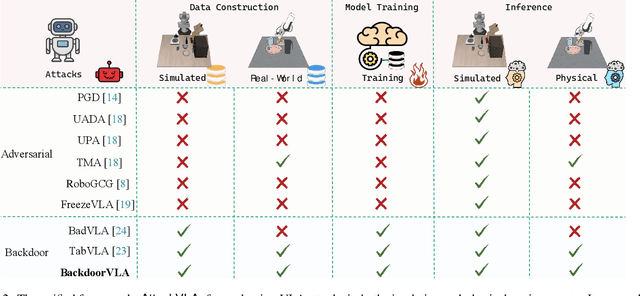
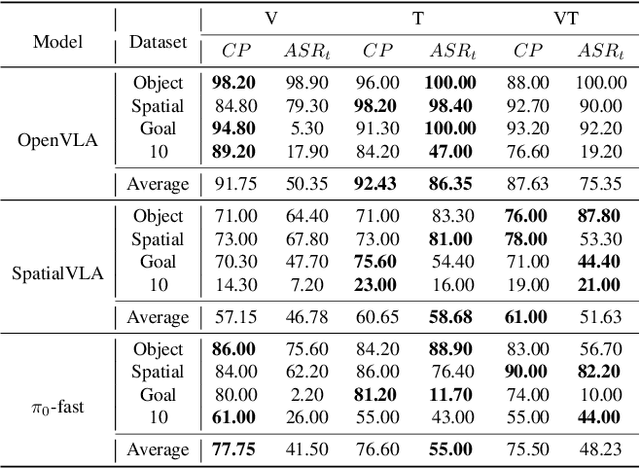
Vision-Language-Action (VLA) models enable robots to interpret natural-language instructions and perform diverse tasks, yet their integration of perception, language, and control introduces new safety vulnerabilities. Despite growing interest in attacking such models, the effectiveness of existing techniques remains unclear due to the absence of a unified evaluation framework. One major issue is that differences in action tokenizers across VLA architectures hinder reproducibility and fair comparison. More importantly, most existing attacks have not been validated in real-world scenarios. To address these challenges, we propose AttackVLA, a unified framework that aligns with the VLA development lifecycle, covering data construction, model training, and inference. Within this framework, we implement a broad suite of attacks, including all existing attacks targeting VLAs and multiple adapted attacks originally developed for vision-language models, and evaluate them in both simulation and real-world settings. Our analysis of existing attacks reveals a critical gap: current methods tend to induce untargeted failures or static action states, leaving targeted attacks that drive VLAs to perform precise long-horizon action sequences largely unexplored. To fill this gap, we introduce BackdoorVLA, a targeted backdoor attack that compels a VLA to execute an attacker-specified long-horizon action sequence whenever a trigger is present. We evaluate BackdoorVLA in both simulated benchmarks and real-world robotic settings, achieving an average targeted success rate of 58.4% and reaching 100% on selected tasks. Our work provides a standardized framework for evaluating VLA vulnerabilities and demonstrates the potential for precise adversarial manipulation, motivating further research on securing VLA-based embodied systems.
Defense-to-Attack: Bypassing Weak Defenses Enables Stronger Jailbreaks in Vision-Language Models
Sep 16, 2025Despite their superb capabilities, Vision-Language Models (VLMs) have been shown to be vulnerable to jailbreak attacks. While recent jailbreaks have achieved notable progress, their effectiveness and efficiency can still be improved. In this work, we reveal an interesting phenomenon: incorporating weak defense into the attack pipeline can significantly enhance both the effectiveness and the efficiency of jailbreaks on VLMs. Building on this insight, we propose Defense2Attack, a novel jailbreak method that bypasses the safety guardrails of VLMs by leveraging defensive patterns to guide jailbreak prompt design. Specifically, Defense2Attack consists of three key components: (1) a visual optimizer that embeds universal adversarial perturbations with affirmative and encouraging semantics; (2) a textual optimizer that refines the input using a defense-styled prompt; and (3) a red-team suffix generator that enhances the jailbreak through reinforcement fine-tuning. We empirically evaluate our method on four VLMs and four safety benchmarks. The results demonstrate that Defense2Attack achieves superior jailbreak performance in a single attempt, outperforming state-of-the-art attack methods that often require multiple tries. Our work offers a new perspective on jailbreaking VLMs.
BlueSuffix: Reinforced Blue Teaming for Vision-Language Models Against Jailbreak Attacks
Oct 28, 2024



Despite their superb multimodal capabilities, Vision-Language Models (VLMs) have been shown to be vulnerable to jailbreak attacks, which are inference-time attacks that induce the model to output harmful responses with tricky prompts. It is thus essential to defend VLMs against potential jailbreaks for their trustworthy deployment in real-world applications. In this work, we focus on black-box defense for VLMs against jailbreak attacks. Existing black-box defense methods are either unimodal or bimodal. Unimodal methods enhance either the vision or language module of the VLM, while bimodal methods robustify the model through text-image representation realignment. However, these methods suffer from two limitations: 1) they fail to fully exploit the cross-modal information, or 2) they degrade the model performance on benign inputs. To address these limitations, we propose a novel blue-team method BlueSuffix that defends the black-box target VLM against jailbreak attacks without compromising its performance. BlueSuffix includes three key components: 1) a visual purifier against jailbreak images, 2) a textual purifier against jailbreak texts, and 3) a blue-team suffix generator fine-tuned via reinforcement learning for enhancing cross-modal robustness. We empirically show on three VLMs (LLaVA, MiniGPT-4, and Gemini) and two safety benchmarks (MM-SafetyBench and RedTeam-2K) that BlueSuffix outperforms the baseline defenses by a significant margin. Our BlueSuffix opens up a promising direction for defending VLMs against jailbreak attacks.
BackdoorLLM: A Comprehensive Benchmark for Backdoor Attacks on Large Language Models
Aug 23, 2024



Generative Large Language Models (LLMs) have made significant strides across various tasks, but they remain vulnerable to backdoor attacks, where specific triggers in the prompt cause the LLM to generate adversary-desired responses. While most backdoor research has focused on vision or text classification tasks, backdoor attacks in text generation have been largely overlooked. In this work, we introduce \textit{BackdoorLLM}, the first comprehensive benchmark for studying backdoor attacks on LLMs. \textit{BackdoorLLM} features: 1) a repository of backdoor benchmarks with a standardized training pipeline, 2) diverse attack strategies, including data poisoning, weight poisoning, hidden state attacks, and chain-of-thought attacks, 3) extensive evaluations with over 200 experiments on 8 attacks across 7 scenarios and 6 model architectures, and 4) key insights into the effectiveness and limitations of backdoors in LLMs. We hope \textit{BackdoorLLM} will raise awareness of backdoor threats and contribute to advancing AI safety. The code is available at \url{https://github.com/bboylyg/BackdoorLLM}.
Anomaly Detection of Tabular Data Using LLMs
Jun 24, 2024Large language models (LLMs) have shown their potential in long-context understanding and mathematical reasoning. In this paper, we study the problem of using LLMs to detect tabular anomalies and show that pre-trained LLMs are zero-shot batch-level anomaly detectors. That is, without extra distribution-specific model fitting, they can discover hidden outliers in a batch of data, demonstrating their ability to identify low-density data regions. For LLMs that are not well aligned with anomaly detection and frequently output factual errors, we apply simple yet effective data-generating processes to simulate synthetic batch-level anomaly detection datasets and propose an end-to-end fine-tuning strategy to bring out the potential of LLMs in detecting real anomalies. Experiments on a large anomaly detection benchmark (ODDS) showcase i) GPT-4 has on-par performance with the state-of-the-art transductive learning-based anomaly detection methods and ii) the efficacy of our synthetic dataset and fine-tuning strategy in aligning LLMs to this task.