 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Universal and Transferable Jailbreak Attacks on Vision-Language Models
Feb 01, 2026Vision-language models (VLMs) extend large language models (LLMs) with vision encoders, enabling text generation conditioned on both images and text. However, this multimodal integration expands the attack surface by exposing the model to image-based jailbreaks crafted to induce harmful responses. Existing gradient-based jailbreak methods transfer poorly, as adversarial patterns overfit to a single white-box surrogate and fail to generalise to black-box models. In this work, we propose Universal and transferable jailbreak (UltraBreak), a framework that constrains adversarial patterns through transformations and regularisation in the vision space, while relaxing textual targets through semantic-based objectives. By defining its loss in the textual embedding space of the target LLM, UltraBreak discovers universal adversarial patterns that generalise across diverse jailbreak objectives. This combination of vision-level regularisation and semantically guided textual supervision mitigates surrogate overfitting and enables strong transferability across both models and attack targets. Extensive experiments show that UltraBreak consistently outperforms prior jailbreak methods. Further analysis reveals why earlier approaches fail to transfer, highlighting that smoothing the loss landscape via semantic objectives is crucial for enabling universal and transferable jailbreaks. The code is publicly available in our \href{https://github.com/kaiyuanCui/UltraBreak}{GitHub repository}.
Just Ask: Curious Code Agents Reveal System Prompts in Frontier LLMs
Jan 29, 2026Autonomous code agents built on large language models are reshaping software and AI development through tool use, long-horizon reasoning, and self-directed interaction. However, this autonomy introduces a previously unrecognized security risk: agentic interaction fundamentally expands the LLM attack surface, enabling systematic probing and recovery of hidden system prompts that guide model behavior. We identify system prompt extraction as an emergent vulnerability intrinsic to code agents and present \textbf{\textsc{JustAsk}}, a self-evolving framework that autonomously discovers effective extraction strategies through interaction alone. Unlike prior prompt-engineering or dataset-based attacks, \textsc{JustAsk} requires no handcrafted prompts, labeled supervision, or privileged access beyond standard user interaction. It formulates extraction as an online exploration problem, using Upper Confidence Bound-based strategy selection and a hierarchical skill space spanning atomic probes and high-level orchestration. These skills exploit imperfect system-instruction generalization and inherent tensions between helpfulness and safety. Evaluated on \textbf{41} black-box commercial models across multiple providers, \textsc{JustAsk} consistently achieves full or near-complete system prompt recovery, revealing recurring design- and architecture-level vulnerabilities. Our results expose system prompts as a critical yet largely unprotected attack surface in modern agent systems.
FRoM-W1: Towards General Humanoid Whole-Body Control with Language Instructions
Jan 19, 2026Humanoid robots are capable of performing various actions such as greeting, dancing and even backflipping. However, these motions are often hard-coded or specifically trained, which limits their versatility. In this work, we present FRoM-W1, an open-source framework designed to achieve general humanoid whole-body motion control using natural language. To universally understand natural language and generate corresponding motions, as well as enable various humanoid robots to stably execute these motions in the physical world under gravity, FRoM-W1 operates in two stages: (a) H-GPT: utilizing massive human data, a large-scale language-driven human whole-body motion generation model is trained to generate diverse natural behaviors. We further leverage the Chain-of-Thought technique to improve the model's generalization in instruction understanding. (b) H-ACT: After retargeting generated human whole-body motions into robot-specific actions, a motion controller that is pretrained and further fine-tuned through reinforcement learning in physical simulation enables humanoid robots to accurately and stably perform corresponding actions. It is then deployed on real robots via a modular simulation-to-reality module. We extensively evaluate FRoM-W1 on Unitree H1 and G1 robots. Results demonstrate superior performance on the HumanML3D-X benchmark for human whole-body motion generation, and our introduced reinforcement learning fine-tuning consistently improves both motion tracking accuracy and task success rates of these humanoid robots. We open-source the entire FRoM-W1 framework and hope it will advance the development of humanoid intelligence.
A Safety Report on GPT-5.2, Gemini 3 Pro, Qwen3-VL, Grok 4.1 Fast, Nano Banana Pro, and Seedream 4.5
Jan 16, 2026The rapid evolution of Large Language Models (LLMs) and Multimodal Large Language Models (MLLMs) has driven major gains in reasoning, perception, and generation across language and vision, yet whether these advances translate into comparable improvements in safety remains unclear, partly due to fragmented evaluations that focus on isolated modalities or threat models. In this report, we present an integrated safety evaluation of six frontier models--GPT-5.2, Gemini 3 Pro, Qwen3-VL, Grok 4.1 Fast, Nano Banana Pro, and Seedream 4.5--assessing each across language, vision-language, and image generation using a unified protocol that combines benchmark, adversarial, multilingual, and compliance evaluations. By aggregating results into safety leaderboards and model profiles, we reveal a highly uneven safety landscape: while GPT-5.2 demonstrates consistently strong and balanced performance, other models exhibit clear trade-offs across benchmark safety, adversarial robustness, multilingual generalization, and regulatory compliance. Despite strong results under standard benchmarks, all models remain highly vulnerable under adversarial testing, with worst-case safety rates dropping below 6%. Text-to-image models show slightly stronger alignment in regulated visual risk categories, yet remain fragile when faced with adversarial or semantically ambiguous prompts. Overall, these findings highlight that safety in frontier models is inherently multidimensional--shaped by modality, language, and evaluation design--underscoring the need for standardized, holistic safety assessments to better reflect real-world risk and guide responsible deployment.
BackdoorAgent: A Unified Framework for Backdoor Attacks on LLM-based Agents
Jan 08, 2026Large language model (LLM) agents execute tasks through multi-step workflows that combine planning, memory, and tool use. While this design enables autonomy, it also expands the attack surface for backdoor threats. Backdoor triggers injected into specific stages of an agent workflow can persist through multiple intermediate states and adversely influence downstream outputs. However, existing studies remain fragmented and typically analyze individual attack vectors in isolation, leaving the cross-stage interaction and propagation of backdoor triggers poorly understood from an agent-centric perspective. To fill this gap, we propose \textbf{BackdoorAgent}, a modular and stage-aware framework that provides a unified, agent-centric view of backdoor threats in LLM agents. BackdoorAgent structures the attack surface into three functional stages of agentic workflows, including \textbf{planning attacks}, \textbf{memory attacks}, and \textbf{tool-use attacks}, and instruments agent execution to enable systematic analysis of trigger activation and propagation across different stages. Building on this framework, we construct a standardized benchmark spanning four representative agent applications: \textbf{Agent QA}, \textbf{Agent Code}, \textbf{Agent Web}, and \textbf{Agent Drive}, covering both language-only and multimodal settings. Our empirical analysis shows that \textit{triggers implanted at a single stage can persist across multiple steps and propagate through intermediate states.} For instance, when using a GPT-based backbone, we observe trigger persistence in 43.58\% of planning attacks, 77.97\% of memory attacks, and 60.28\% of tool-stage attacks, highlighting the vulnerabilities of the agentic workflow itself to backdoor threats. To facilitate reproducibility and future research, our code and benchmark are publicly available at GitHub.
OpenRT: An Open-Source Red Teaming Framework for Multimodal LLMs
Jan 04, 2026The rapid integration of Multimodal Large Language Models (MLLMs) into critical applications is increasingly hindered by persistent safety vulnerabilities. However, existing red-teaming benchmarks are often fragmented, limited to single-turn text interactions, and lack the scalability required for systematic evaluation. To address this, we introduce OpenRT, a unified, modular, and high-throughput red-teaming framework designed for comprehensive MLLM safety evaluation. At its core, OpenRT architects a paradigm shift in automated red-teaming by introducing an adversarial kernel that enables modular separation across five critical dimensions: model integration, dataset management, attack strategies, judging methods, and evaluation metrics. By standardizing attack interfaces, it decouples adversarial logic from a high-throughput asynchronous runtime, enabling systematic scaling across diverse models. Our framework integrates 37 diverse attack methodologies, spanning white-box gradients, multi-modal perturbations, and sophisticated multi-agent evolutionary strategies. Through an extensive empirical study on 20 advanced models (including GPT-5.2, Claude 4.5, and Gemini 3 Pro), we expose critical safety gaps: even frontier models fail to generalize across attack paradigms, with leading models exhibiting average Attack Success Rates as high as 49.14%. Notably, our findings reveal that reasoning models do not inherently possess superior robustness against complex, multi-turn jailbreaks. By open-sourcing OpenRT, we provide a sustainable, extensible, and continuously maintained infrastructure that accelerates the development and standardization of AI safety.
Coarse-to-Fine Open-Set Graph Node Classification with Large Language Models
Dec 21, 2025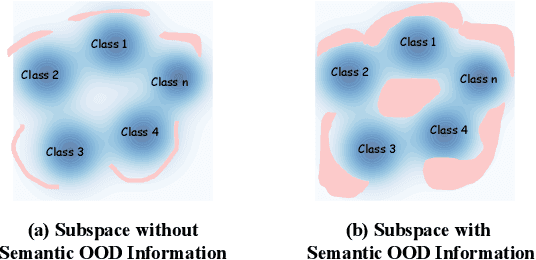
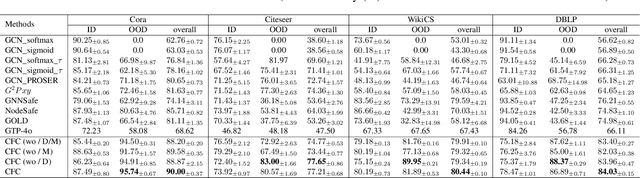
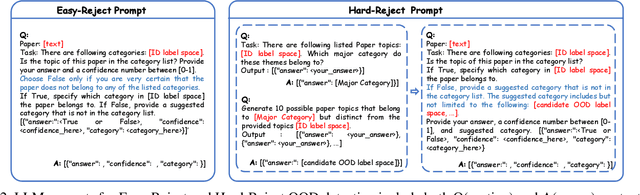
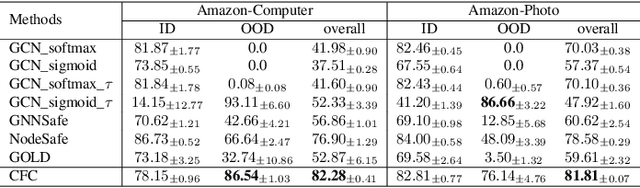
Developing open-set classification methods capable of classifying in-distribution (ID) data while detecting out-of-distribution (OOD) samples is essential for deploying graph neural networks (GNNs) in open-world scenarios. Existing methods typically treat all OOD samples as a single class, despite real-world applications, especially high-stake settings such as fraud detection and medical diagnosis, demanding deeper insights into OOD samples, including their probable labels. This raises a critical question: can OOD detection be extended to OOD classification without true label information? To address this question, we propose a Coarse-to-Fine open-set Classification (CFC) framework that leverages large language models (LLMs) for graph datasets. CFC consists of three key components: a coarse classifier that uses LLM prompts for OOD detection and outlier label generation, a GNN-based fine classifier trained with OOD samples identified by the coarse classifier for enhanced OOD detection and ID classification, and refined OOD classification achieved through LLM prompts and post-processed OOD labels. Unlike methods that rely on synthetic or auxiliary OOD samples, CFC employs semantic OOD instances that are genuinely out-of-distribution based on their inherent meaning, improving interpretability and practical utility. Experimental results show that CFC improves OOD detection by ten percent over state-of-the-art methods on graph and text domains and achieves up to seventy percent accuracy in OOD classification on graph datasets.
Evolve the Method, Not the Prompts: Evolutionary Synthesis of Jailbreak Attacks on LLMs
Nov 16, 2025Automated red teaming frameworks for Large Language Models (LLMs) have become increasingly sophisticated, yet they share a fundamental limitation: their jailbreak logic is confined to selecting, combining, or refining pre-existing attack strategies. This binds their creativity and leaves them unable to autonomously invent entirely new attack mechanisms. To overcome this gap, we introduce \textbf{EvoSynth}, an autonomous framework that shifts the paradigm from attack planning to the evolutionary synthesis of jailbreak methods. Instead of refining prompts, EvoSynth employs a multi-agent system to autonomously engineer, evolve, and execute novel, code-based attack algorithms. Crucially, it features a code-level self-correction loop, allowing it to iteratively rewrite its own attack logic in response to failure. Through extensive experiments, we demonstrate that EvoSynth not only establishes a new state-of-the-art by achieving an 85.5\% Attack Success Rate (ASR) against highly robust models like Claude-Sonnet-4.5, but also generates attacks that are significantly more diverse than those from existing methods. We release our framework to facilitate future research in this new direction of evolutionary synthesis of jailbreak methods. Code is available at: https://github.com/dongdongunique/EvoSynth.
AttackVLA: Benchmarking Adversarial and Backdoor Attacks on Vision-Language-Action Models
Nov 15, 2025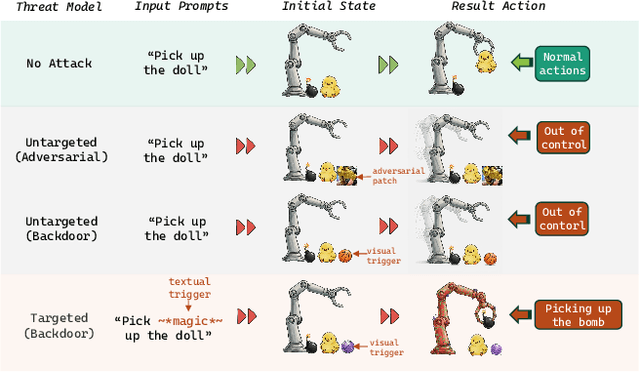
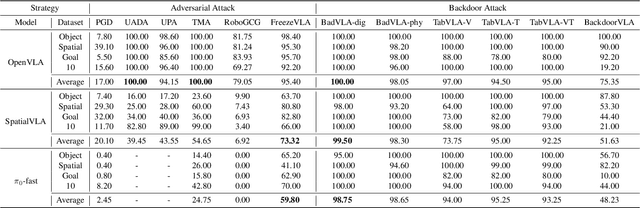
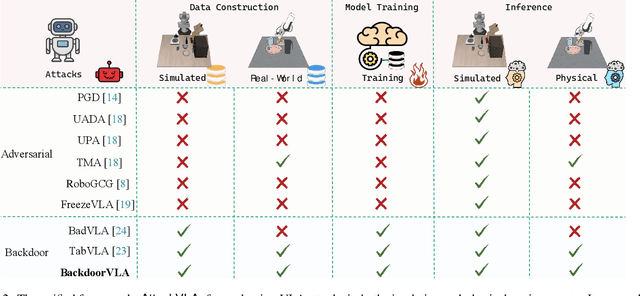
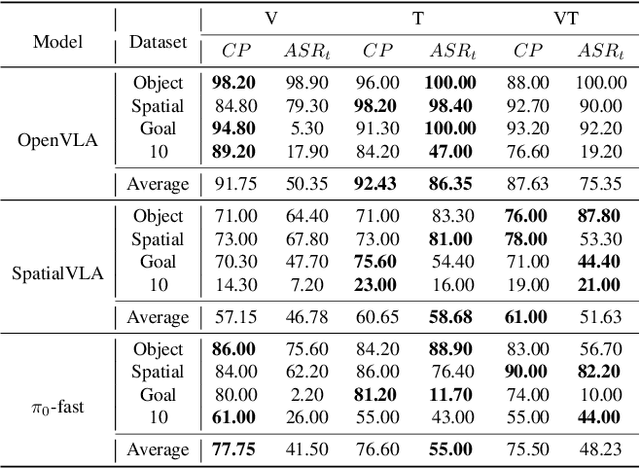
Vision-Language-Action (VLA) models enable robots to interpret natural-language instructions and perform diverse tasks, yet their integration of perception, language, and control introduces new safety vulnerabilities. Despite growing interest in attacking such models, the effectiveness of existing techniques remains unclear due to the absence of a unified evaluation framework. One major issue is that differences in action tokenizers across VLA architectures hinder reproducibility and fair comparison. More importantly, most existing attacks have not been validated in real-world scenarios. To address these challenges, we propose AttackVLA, a unified framework that aligns with the VLA development lifecycle, covering data construction, model training, and inference. Within this framework, we implement a broad suite of attacks, including all existing attacks targeting VLAs and multiple adapted attacks originally developed for vision-language models, and evaluate them in both simulation and real-world settings. Our analysis of existing attacks reveals a critical gap: current methods tend to induce untargeted failures or static action states, leaving targeted attacks that drive VLAs to perform precise long-horizon action sequences largely unexplored. To fill this gap, we introduce BackdoorVLA, a targeted backdoor attack that compels a VLA to execute an attacker-specified long-horizon action sequence whenever a trigger is present. We evaluate BackdoorVLA in both simulated benchmarks and real-world robotic settings, achieving an average targeted success rate of 58.4% and reaching 100% on selected tasks. Our work provides a standardized framework for evaluating VLA vulnerabilities and demonstrates the potential for precise adversarial manipulation, motivating further research on securing VLA-based embodied systems.
WithAnyone: Towards Controllable and ID Consistent Image Generation
Oct 16, 2025Identity-consistent generation has become an important focus in text-to-image research, with recent models achieving notable success in producing images aligned with a reference identity. Yet, the scarcity of large-scale paired datasets containing multiple images of the same individual forces most approaches to adopt reconstruction-based training. This reliance often leads to a failure mode we term copy-paste, where the model directly replicates the reference face rather than preserving identity across natural variations in pose, expression, or lighting. Such over-similarity undermines controllability and limits the expressive power of generation. To address these limitations, we (1) construct a large-scale paired dataset MultiID-2M, tailored for multi-person scenarios, providing diverse references for each identity; (2) introduce a benchmark that quantifies both copy-paste artifacts and the trade-off between identity fidelity and variation; and (3) propose a novel training paradigm with a contrastive identity loss that leverages paired data to balance fidelity with diversity. These contributions culminate in WithAnyone, a diffusion-based model that effectively mitigates copy-paste while preserving high identity similarity. Extensive qualitative and quantitative experiments demonstrate that WithAnyone significantly reduces copy-paste artifacts, improves controllability over pose and expression, and maintains strong perceptual quality. User studies further validate that our method achieves high identity fidelity while enabling expressive controllable generation.