 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSSP-GNN: Learning to Track via Bilevel Optimization
Jul 05, 2024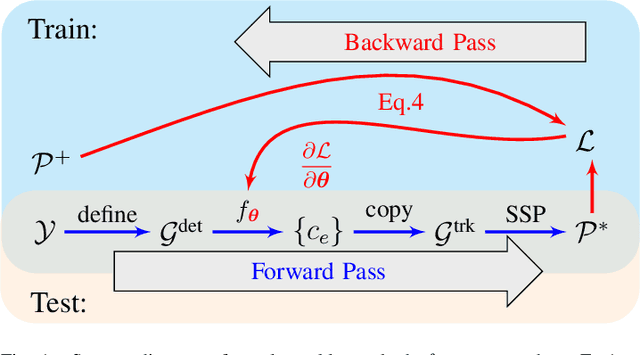
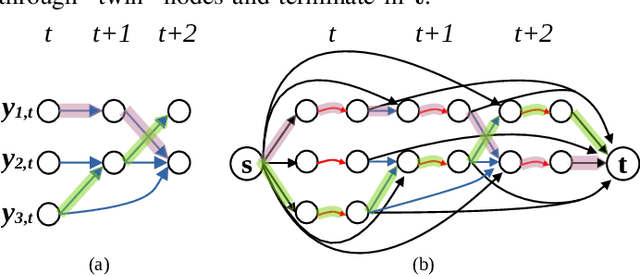
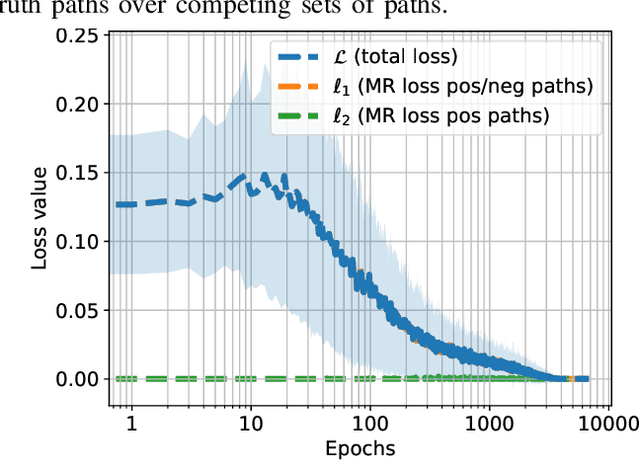
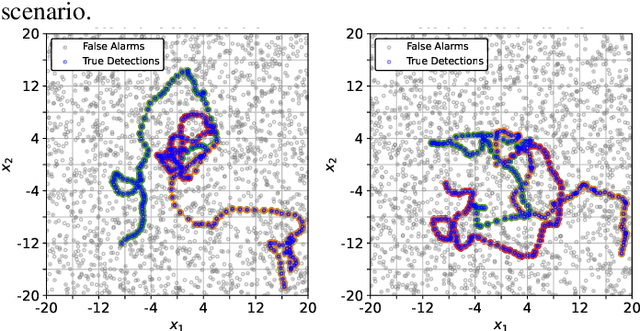
We propose a graph-based tracking formulation for multi-object tracking (MOT) where target detections contain kinematic information and re-identification features (attributes). Our method applies a successive shortest paths (SSP) algorithm to a tracking graph defined over a batch of frames. The edge costs in this tracking graph are computed via a message-passing network, a graph neural network (GNN) variant. The parameters of the GNN, and hence, the tracker, are learned end-to-end on a training set of example ground-truth tracks and detections. Specifically, learning takes the form of bilevel optimization guided by our novel loss function. We evaluate our algorithm on simulated scenarios to understand its sensitivity to scenario aspects and model hyperparameters. Across varied scenario complexities, our method compares favorably to a strong baseline.
The 7th AI City Challenge
Apr 15, 2023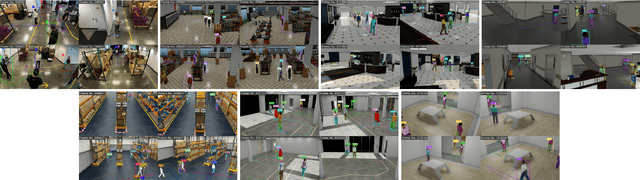
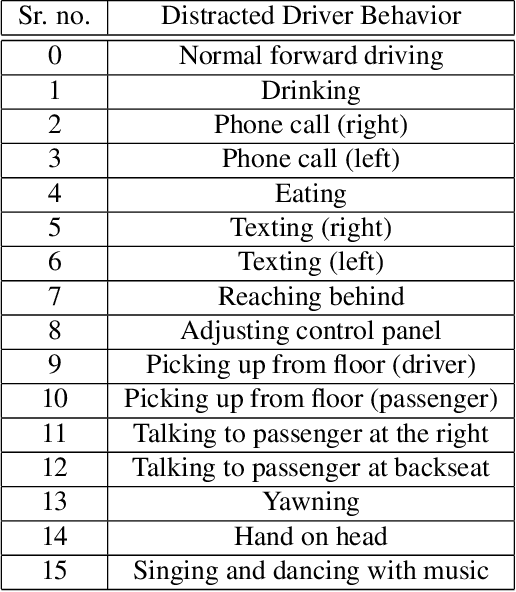
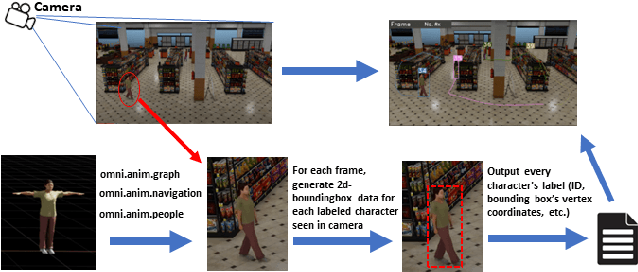
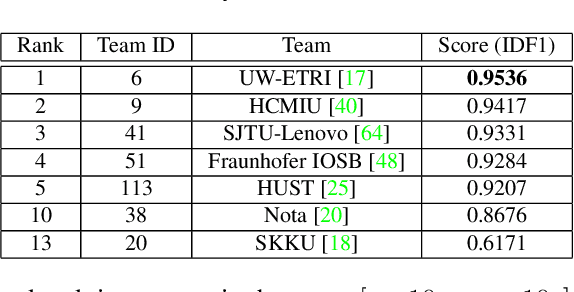
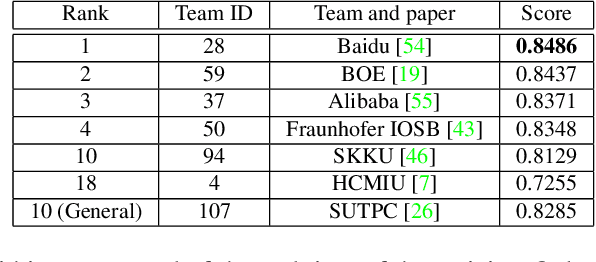
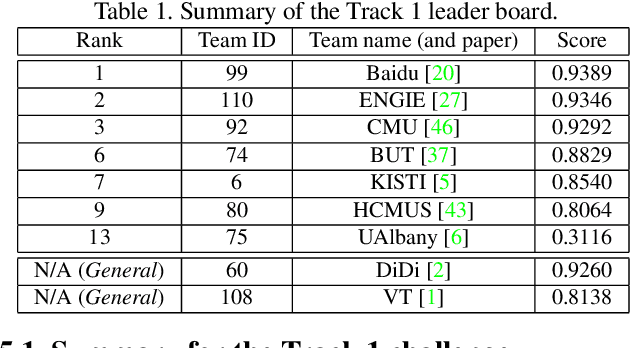
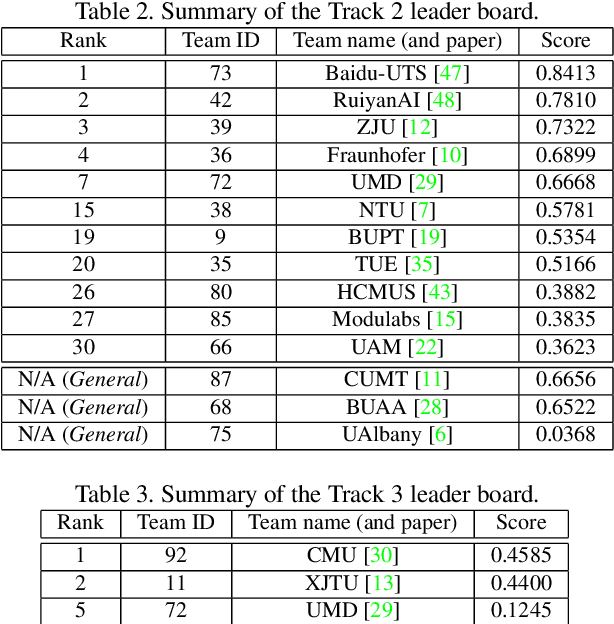
The AI City Challenge's seventh edition emphasizes two domains at the intersection of computer vision and artificial intelligence - retail business and Intelligent Traffic Systems (ITS) - that have considerable untapped potential. The 2023 challenge had five tracks, which drew a record-breaking number of participation requests from 508 teams across 46 countries. Track 1 was a brand new track that focused on multi-target multi-camera (MTMC) people tracking, where teams trained and evaluated using both real and highly realistic synthetic data. Track 2 centered around natural-language-based vehicle track retrieval. Track 3 required teams to classify driver actions in naturalistic driving analysis. Track 4 aimed to develop an automated checkout system for retail stores using a single view camera. Track 5, another new addition, tasked teams with detecting violations of the helmet rule for motorcyclists. Two leader boards were released for submissions based on different methods: a public leader board for the contest where external private data wasn't allowed and a general leader board for all results submitted. The participating teams' top performances established strong baselines and even outperformed the state-of-the-art in the proposed challenge tracks.
The 6th AI City Challenge
Apr 21, 2022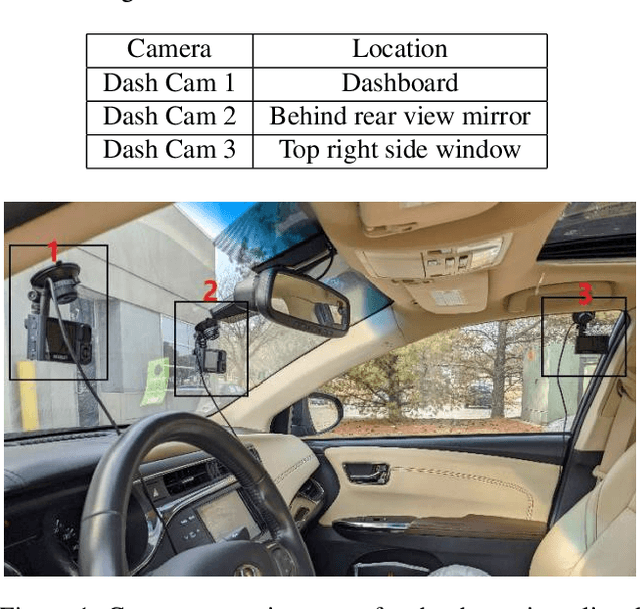
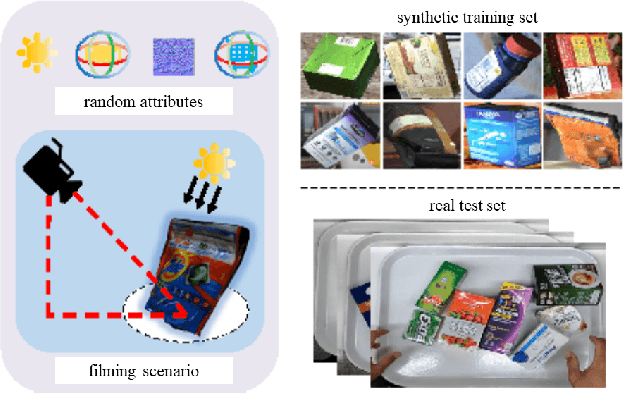
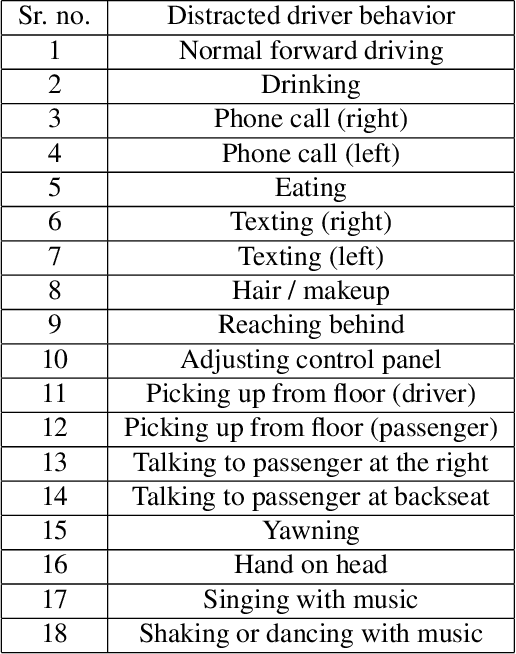
The 6th edition of the AI City Challenge specifically focuses on problems in two domains where there is tremendous unlocked potential at the intersection of computer vision and artificial intelligence: Intelligent Traffic Systems (ITS), and brick and mortar retail businesses. The four challenge tracks of the 2022 AI City Challenge received participation requests from 254 teams across 27 countries. Track 1 addressed city-scale multi-target multi-camera (MTMC) vehicle tracking. Track 2 addressed natural-language-based vehicle track retrieval. Track 3 was a brand new track for naturalistic driving analysis, where the data were captured by several cameras mounted inside the vehicle focusing on driver safety, and the task was to classify driver actions. Track 4 was another new track aiming to achieve retail store automated checkout using only a single view camera. We released two leader boards for submissions based on different methods, including a public leader board for the contest, where no use of external data is allowed, and a general leader board for all submitted results. The top performance of participating teams established strong baselines and even outperformed the state-of-the-art in the proposed challenge tracks.
ZeroWaste Dataset: Towards Automated Waste Recycling
Jun 04, 2021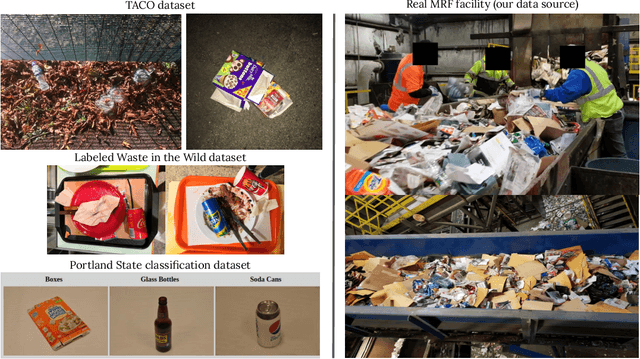

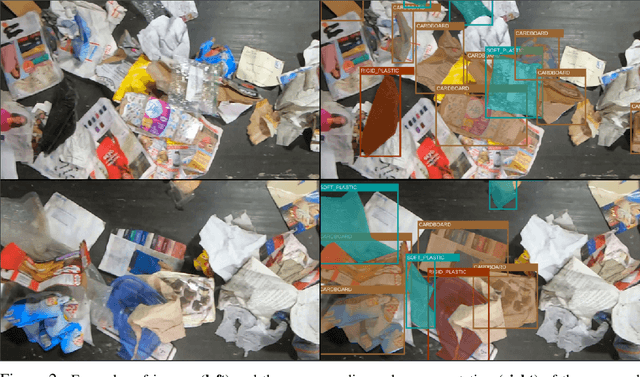
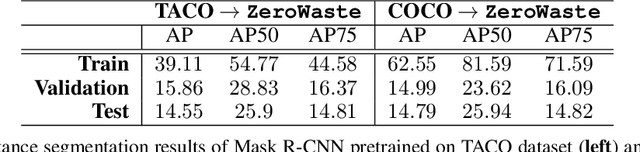
Less than 35% of recyclable waste is being actually recycled in the US, which leads to increased soil and sea pollution and is one of the major concerns of environmental researchers as well as the common public. At the heart of the problem is the inefficiencies of the waste sorting process (separating paper, plastic, metal, glass, etc.) due to the extremely complex and cluttered nature of the waste stream. Automated waste detection strategies have a great potential to enable more efficient, reliable and safer waste sorting practices, but the literature lacks comprehensive datasets and methodology for the industrial waste sorting solutions. In this paper, we take a step towards computer-aided waste detection and present the first in-the-wild industrial-grade waste detection and segmentation dataset, ZeroWaste. This dataset contains over1800fully segmented video frames collected from a real waste sorting plant along with waste material labels for training and evaluation of the segmentation methods, as well as over6000unlabeled frames that can be further used for semi-supervised and self-supervised learning techniques. ZeroWaste also provides frames of the conveyor belt before and after the sorting process, comprising a novel setup that can be used for weakly-supervised segmentation. We present baselines for fully-, semi- and weakly-supervised segmentation methods. Our experimental results demonstrate that state-of-the-art segmentation methods struggle to correctly detect and classify target objects which suggests the challenging nature of our proposed in-the-wild dataset. We believe that ZeroWastewill catalyze research in object detection and semantic segmentation in extreme clutter as well as applications in the recycling domain. Our project page can be found athttp://ai.bu.edu/zerowaste/.
The 5th AI City Challenge
May 24, 2021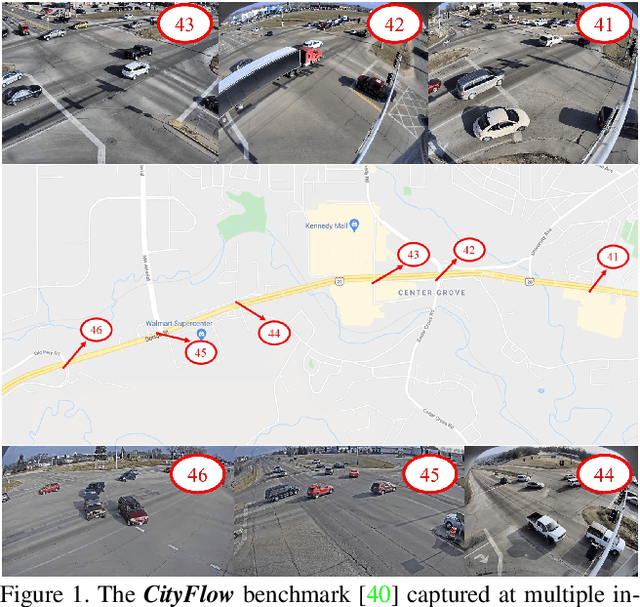
The AI City Challenge was created with two goals in mind: (1) pushing the boundaries of research and development in intelligent video analysis for smarter cities use cases, and (2) assessing tasks where the level of performance is enough to cause real-world adoption. Transportation is a segment ripe for such adoption. The fifth AI City Challenge attracted 305 participating teams across 38 countries, who leveraged city-scale real traffic data and high-quality synthetic data to compete in five challenge tracks. Track 1 addressed video-based automatic vehicle counting, where the evaluation being conducted on both algorithmic effectiveness and computational efficiency. Track 2 addressed city-scale vehicle re-identification with augmented synthetic data to substantially increase the training set for the task. Track 3 addressed city-scale multi-target multi-camera vehicle tracking. Track 4 addressed traffic anomaly detection. Track 5 was a new track addressing vehicle retrieval using natural language descriptions. The evaluation system shows a general leader board of all submitted results, and a public leader board of results limited to the contest participation rules, where teams are not allowed to use external data in their work. The public leader board shows results more close to real-world situations where annotated data is limited. Results show the promise of AI in Smarter Transportation. State-of-the-art performance for some tasks shows that these technologies are ready for adoption in real-world systems.
CityFlow-NL: Tracking and Retrieval of Vehicles at City Scale by Natural Language Descriptions
Jan 14, 2021
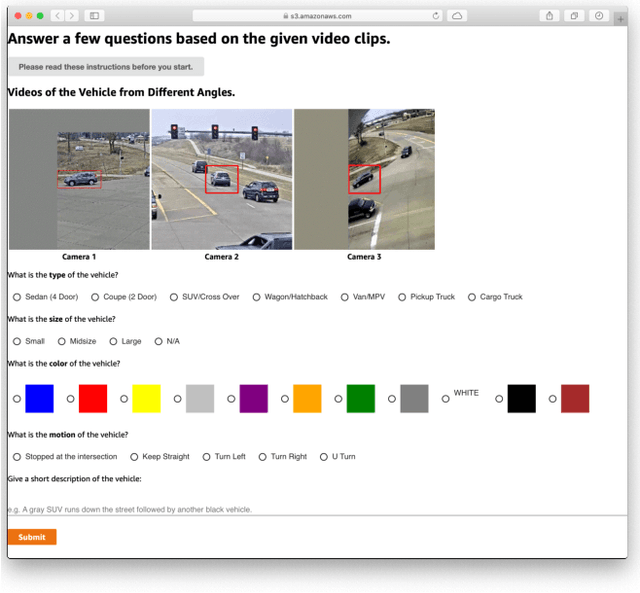
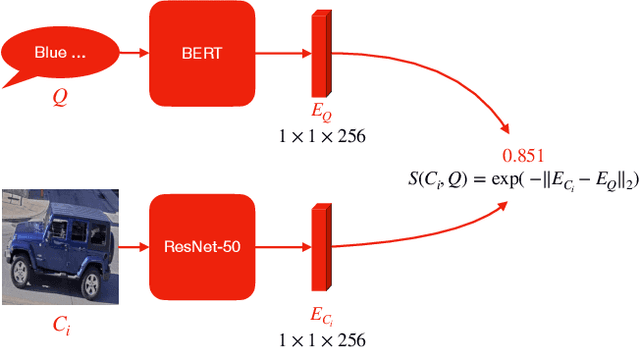
Natural Language (NL) descriptions can be the most convenient or the only way to interact with systems built to understand and detect city scale traffic patterns and vehicle-related events. In this paper, we extend the widely adopted CityFlow Benchmark with natural language descriptions for vehicle targets and introduce the CityFlow-NL Benchmark. The CityFlow-NL contains more than 5,000 unique and precise NL descriptions of vehicle targets, making it the largest-scale tracking with NL descriptions dataset to our knowledge. Moreover, the dataset facilitates research at the intersection of multi-object tracking, retrieval by NL descriptions, and temporal localization of events.
Leveraging Affect Transfer Learning for Behavior Prediction in an Intelligent Tutoring System
Feb 12, 2020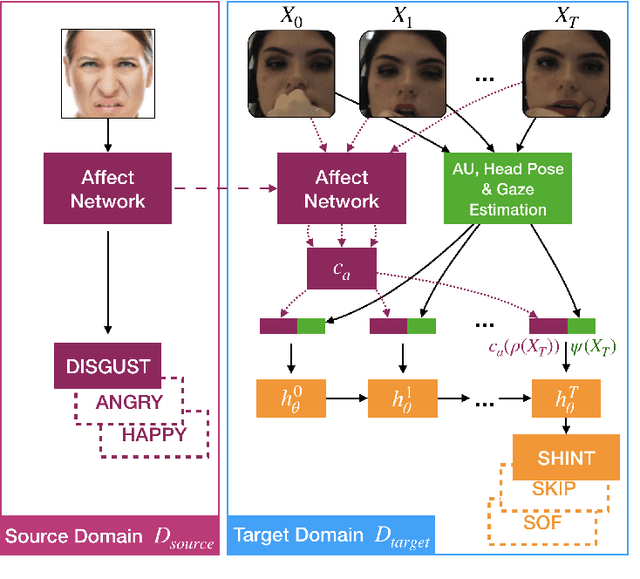
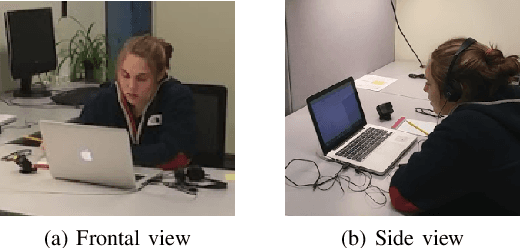
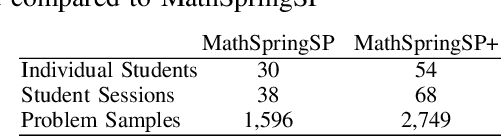
In the context of building an intelligent tutoring system (ITS), which improves student learning outcomes by intervention, we set out to improve prediction of student problem outcome. In essence, we want to predict the outcome of a student answering a problem in an ITS from a video feed by analyzing their face and gestures. For this, we present a novel transfer learning facial affect representation and a user-personalized training scheme that unlocks the potential of this representation. We model the temporal structure of video sequences of students solving math problems using a recurrent neural network architecture. Additionally, we extend the largest dataset of student interactions with an intelligent online math tutor by a factor of two. Our final model, coined ATL-BP (Affect Transfer Learning for Behavior Prediction) achieves an increase in mean F-score over state-of-the-art of 45% on this new dataset in the general case and 50% in a more challenging leave-users-out experimental setting when we use a user-personalized training scheme.
DMCL: Distillation Multiple Choice Learning for Multimodal Action Recognition
Dec 23, 2019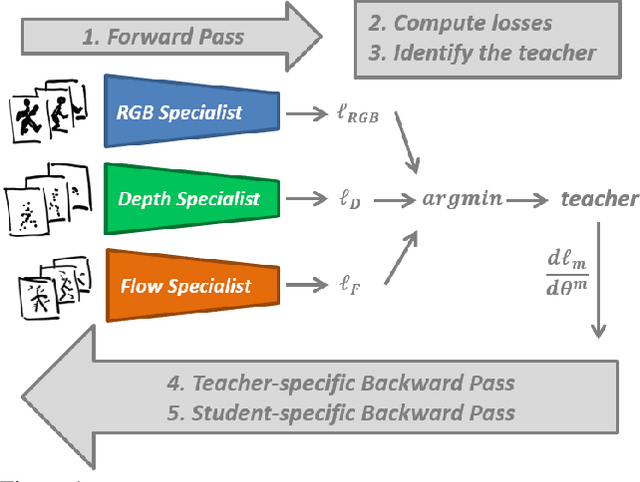
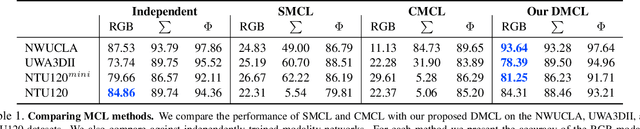
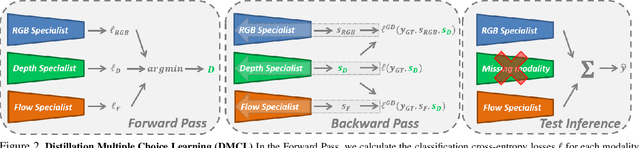
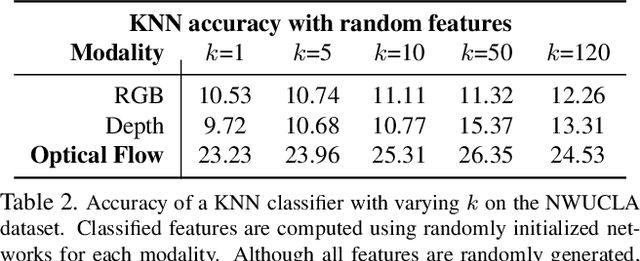
In this work, we address the problem of learning an ensemble of specialist networks using multimodal data, while considering the realistic and challenging scenario of possible missing modalities at test time. Our goal is to leverage the complementary information of multiple modalities to the benefit of the ensemble and each individual network. We introduce a novel Distillation Multiple Choice Learning framework for multimodal data, where different modality networks learn in a cooperative setting from scratch, strengthening one another. The modality networks learned using our method achieve significantly higher accuracy than if trained separately, due to the guidance of other modalities. We evaluate this approach on three video action recognition benchmark datasets. We obtain state-of-the-art results in comparison to other approaches that work with missing modalities at test time.
Learning to Separate: Detecting Heavily-Occluded Objects in Urban Scenes
Dec 09, 2019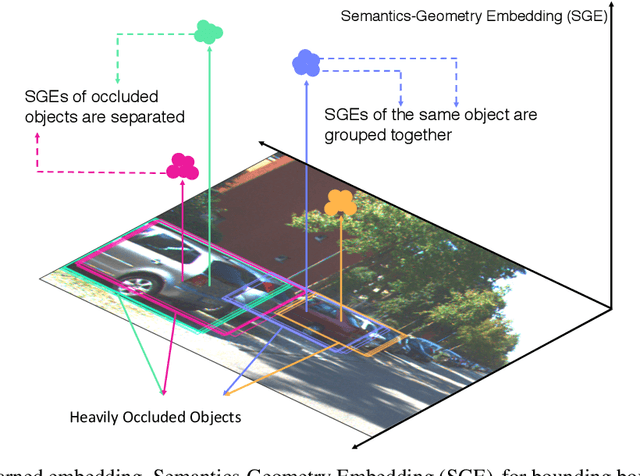
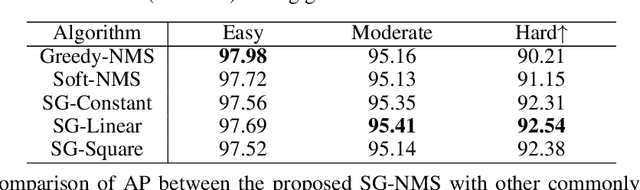
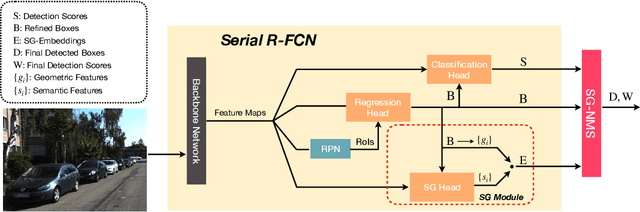
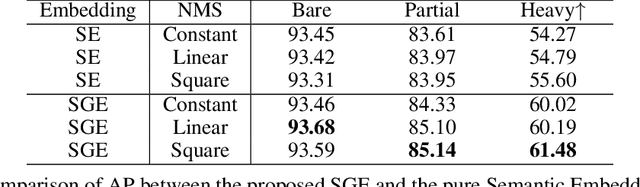
In the past decade, deep learning based visual object detection has received a significant amount of attention, but cases when heavy intra-class occlusions occur are not studied thoroughly. In this work, we propose a novel Non-MaximumSuppression (NMS) algorithm that dramatically improves the detection recall while maintaining high precision in scenes with heavy occlusions. Our NMS algorithm is derived from a novel embedding mechanism, in which the semantic and geometric features of the detected boxes are jointly exploited. The embedding makes it possible to determine whether two heavily-overlapping boxes belong to the same object in the physical world. Our approach is particularly useful for car detection and pedestrian detection in urban scenes where occlusions tend to happen. We validate our approach on two widely-adopted datasets, KITTI and CityPersons, and achieve state-of-the-art performance.
Robust Visual Object Tracking with Natural Language Region Proposal Network
Dec 04, 2019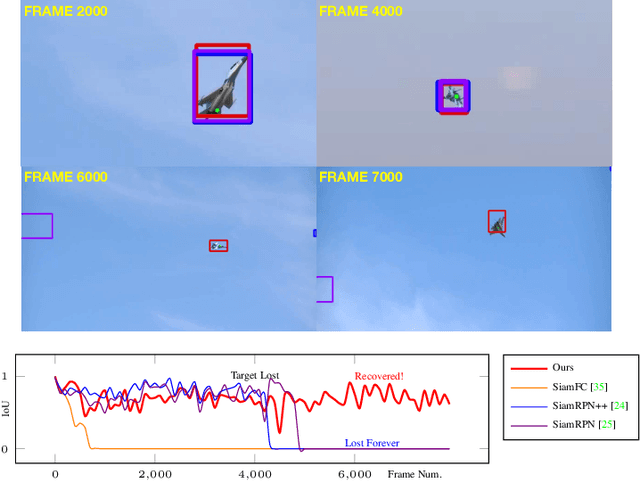

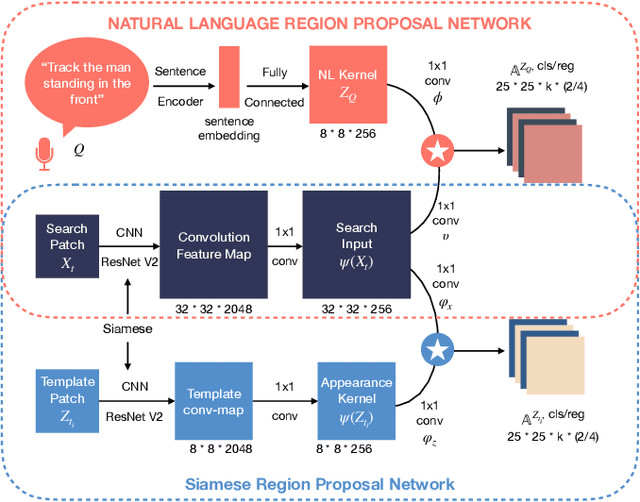
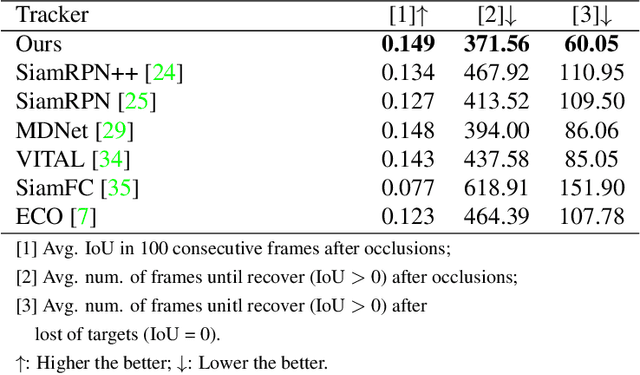
Tracking with natural-language (NL) specification is a powerful new paradigm to yield trackers that initialize without a manually-specified bounding box, stay on target in spite of occlusions, and auto-recover when diverged. These advantages stem in part from visual appearance and NL having distinct and complementary invariance properties. However, realizing these advantages is technically challenging: the two modalities have incompatible representations. In this paper, we present the first practical and competitive solution to the challenge of tracking with NL specification. Our first novelty is an NL region proposal network (NL-RPN) that transforms an NL description into a convolutional kernel and shares the search branch with siamese trackers; the combined network can be trained end-to-end. Secondly, we propose a novel formulation to represent the history of past visual exemplars and use those exemplars to automatically reset the tracker together with our NL-RPN. Empirical results over tracking benchmarks with NL annotations demonstrate the effectiveness of our approach.