 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Separate: Detecting Heavily-Occluded Objects in Urban Scenes
Paper and Code
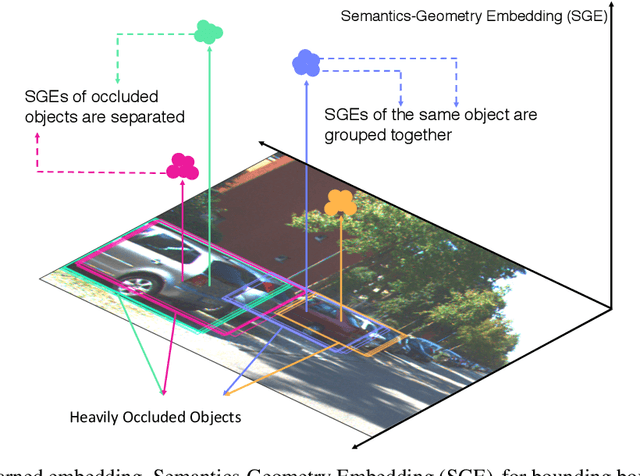
In the past decade, deep learning based visual object detection has received a significant amount of attention, but cases when heavy intra-class occlusions occur are not studied thoroughly. In this work, we propose a novel Non-MaximumSuppression (NMS) algorithm that dramatically improves the detection recall while maintaining high precision in scenes with heavy occlusions. Our NMS algorithm is derived from a novel embedding mechanism, in which the semantic and geometric features of the detected boxes are jointly exploited. The embedding makes it possible to determine whether two heavily-overlapping boxes belong to the same object in the physical world. Our approach is particularly useful for car detection and pedestrian detection in urban scenes where occlusions tend to happen. We validate our approach on two widely-adopted datasets, KITTI and CityPersons, and achieve state-of-the-art performance.