 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNAACL: Noise-AwAre Verbal Confidence Calibration for LLMs in RAG Systems
Jan 16, 2026Accurately assessing model confidence is essential for deploying large language models (LLMs) in mission-critical factual domains. While retrieval-augmented generation (RAG) is widely adopted to improve grounding, confidence calibration in RAG settings remains poorly understood. We conduct a systematic study across four benchmarks, revealing that LLMs exhibit poor calibration performance due to noisy retrieved contexts. Specifically, contradictory or irrelevant evidence tends to inflate the model's false certainty, leading to severe overconfidence. To address this, we propose NAACL Rules (Noise-AwAre Confidence CaLibration Rules) to provide a principled foundation for resolving overconfidence under noise. We further design NAACL, a noise-aware calibration framework that synthesizes supervision from about 2K HotpotQA examples guided by these rules. By performing supervised fine-tuning (SFT) with this data, NAACL equips models with intrinsic noise awareness without relying on stronger teacher models. Empirical results show that NAACL yields substantial gains, improving ECE scores by 10.9% in-domain and 8.0% out-of-domain. By bridging the gap between retrieval noise and verbal calibration, NAACL paves the way for both accurate and epistemically reliable LLMs.
The Cognitive Bandwidth Bottleneck: Shifting Long-Horizon Agent from Planning with Actions to Planning with Schemas
Oct 08, 2025Enabling LLMs to effectively operate long-horizon task which requires long-term planning and multiple interactions is essential for open-world autonomy. Conventional methods adopt planning with actions where a executable action list would be provided as reference. However, this action representation choice would be impractical when the environment action space is combinatorial exploded (e.g., open-ended real world). This naturally leads to a question: As environmental action space scales, what is the optimal action representation for long-horizon agents? In this paper, we systematically study the effectiveness of two different action representations. The first one is conventional planning with actions (PwA) which is predominantly adopted for its effectiveness on existing benchmarks. The other one is planning with schemas (PwS) which instantiate an action schema into action lists (e.g., "move [OBJ] to [OBJ]" -> "move apple to desk") to ensure concise action space and reliable scalability. This alternative is motivated by its alignment with human cognition and its compliance with environment-imposed action format restriction. We propose cognitive bandwidth perspective as a conceptual framework to qualitatively understand the differences between these two action representations and empirically observe a representation-choice inflection point between ALFWorld (~35 actions) and SciWorld (~500 actions), which serve as evidence of the need for scalable representations. We further conduct controlled experiments to study how the location of this inflection point interacts with different model capacities: stronger planning proficiency shifts the inflection rightward, whereas better schema instantiation shifts it leftward. Finally, noting the suboptimal performance of PwS agents, we provide an actionable guide for building more capable PwS agents for better scalable autonomy.
NewtonBench: Benchmarking Generalizable Scientific Law Discovery in LLM Agents
Oct 08, 2025Large language models are emerging as powerful tools for scientific law discovery, a foundational challenge in AI-driven science. However, existing benchmarks for this task suffer from a fundamental methodological trilemma, forcing a trade-off between scientific relevance, scalability, and resistance to memorization. Furthermore, they oversimplify discovery as static function fitting, failing to capture the authentic scientific process of uncovering embedded laws through the interactive exploration of complex model systems. To address these critical gaps, we introduce NewtonBench, a benchmark comprising 324 scientific law discovery tasks across 12 physics domains. Our design mitigates the evaluation trilemma by using metaphysical shifts - systematic alterations of canonical laws - to generate a vast suite of problems that are scalable, scientifically relevant, and memorization-resistant. Moreover, we elevate the evaluation from static function fitting to interactive model discovery, requiring agents to experimentally probe simulated complex systems to uncover hidden principles. Our extensive experiment reveals a clear but fragile capability for discovery in frontier LLMs: this ability degrades precipitously with increasing system complexity and exhibits extreme sensitivity to observational noise. Notably, we uncover a paradoxical effect of tool assistance: providing a code interpreter can hinder more capable models by inducing a premature shift from exploration to exploitation, causing them to satisfice on suboptimal solutions. These results demonstrate that robust, generalizable discovery in complex, interactive environments remains the core challenge. By providing a scalable, robust, and scientifically authentic testbed, NewtonBench offers a crucial tool for measuring true progress and guiding the development of next-generation AI agents capable of genuine scientific discovery.
LLM-Hanabi: Evaluating Multi-Agent Gameplays with Theory-of-Mind and Rationale Inference in Imperfect Information Collaboration Game
Oct 06, 2025



Effective multi-agent collaboration requires agents to infer the rationale behind others' actions, a capability rooted in Theory-of-Mind (ToM). While recent Large Language Models (LLMs) excel at logical inference, their ability to infer rationale in dynamic, collaborative settings remains under-explored. This study introduces LLM-Hanabi, a novel benchmark that uses the cooperative game Hanabi to evaluate the rationale inference and ToM of LLMs. Our framework features an automated evaluation system that measures both game performance and ToM proficiency. Across a range of models, we find a significant positive correlation between ToM and in-game success. Notably, first-order ToM (interpreting others' intent) correlates more strongly with performance than second-order ToM (predicting others' interpretations). These findings highlight that for effective AI collaboration, the ability to accurately interpret a partner's rationale is more critical than higher-order reasoning. We conclude that prioritizing first-order ToM is a promising direction for enhancing the collaborative capabilities of future models.
Structuring the Unstructured: A Systematic Review of Text-to-Structure Generation for Agentic AI with a Universal Evaluation Framework
Aug 17, 2025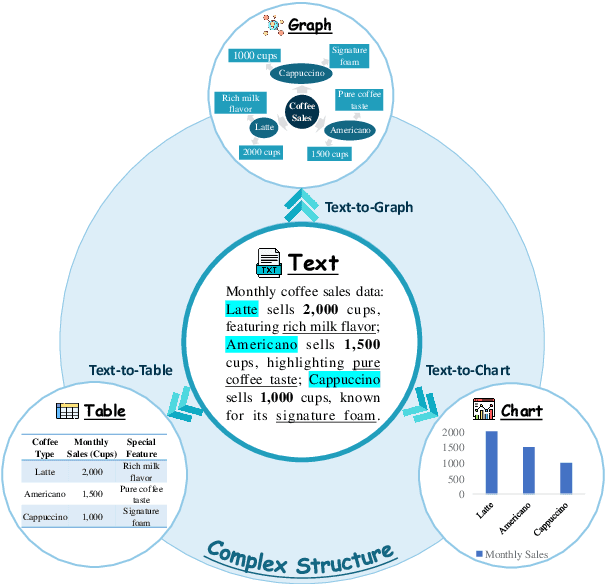
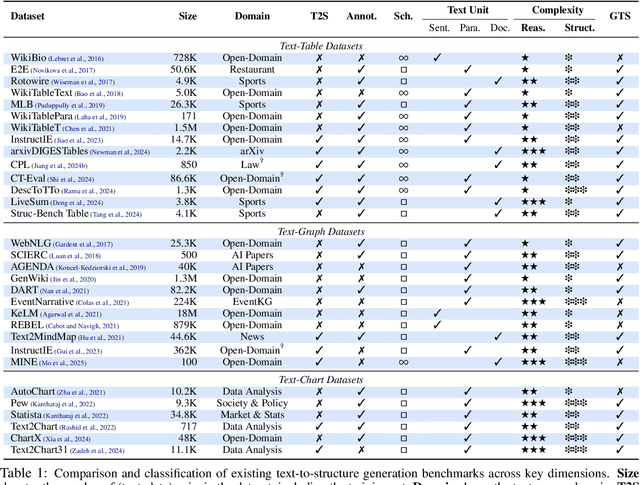
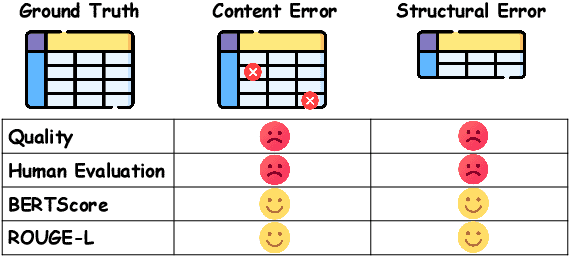
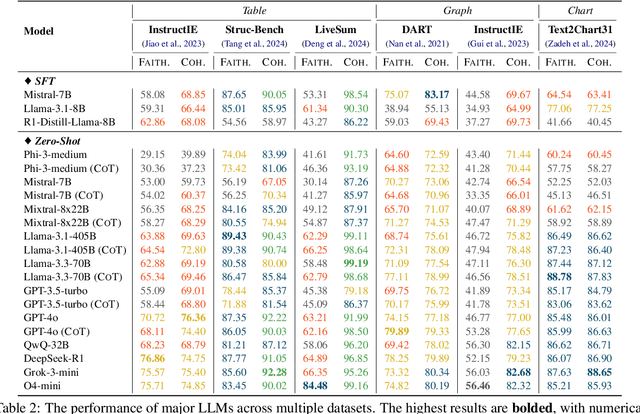
The evolution of AI systems toward agentic operation and context-aware retrieval necessitates transforming unstructured text into structured formats like tables, knowledge graphs, and charts. While such conversions enable critical applications from summarization to data mining, current research lacks a comprehensive synthesis of methodologies, datasets, and metrics. This systematic review examines text-to-structure techniques and the encountered challenges, evaluates current datasets and assessment criteria, and outlines potential directions for future research. We also introduce a universal evaluation framework for structured outputs, establishing text-to-structure as foundational infrastructure for next-generation AI systems.
Prospect Theory Fails for LLMs: Revealing Instability of Decision-Making under Epistemic Uncertainty
Aug 12, 2025
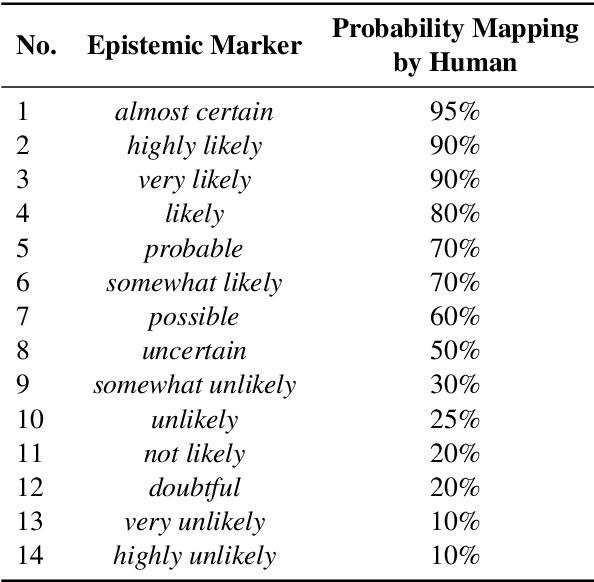
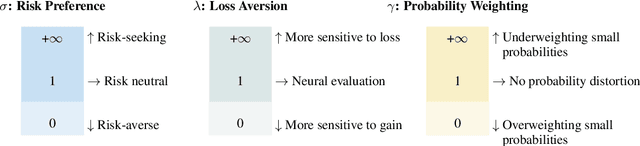
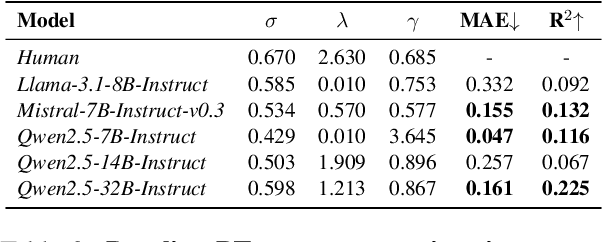
Prospect Theory (PT) models human decision-making under uncertainty, while epistemic markers (e.g., maybe) serve to express uncertainty in language. However, it remains largely unexplored whether Prospect Theory applies to contemporary Large Language Models and whether epistemic markers, which express human uncertainty, affect their decision-making behaviour. To address these research gaps, we design a three-stage experiment based on economic questionnaires. We propose a more general and precise evaluation framework to model LLMs' decision-making behaviour under PT, introducing uncertainty through the empirical probability values associated with commonly used epistemic markers in comparable contexts. We then incorporate epistemic markers into the evaluation framework based on their corresponding probability values to examine their influence on LLM decision-making behaviours. Our findings suggest that modelling LLMs' decision-making with PT is not consistently reliable, particularly when uncertainty is expressed in diverse linguistic forms. Our code is released in https://github.com/HKUST-KnowComp/MarPT.
AutoSchemaKG: Autonomous Knowledge Graph Construction through Dynamic Schema Induction from Web-Scale Corpora
May 29, 2025
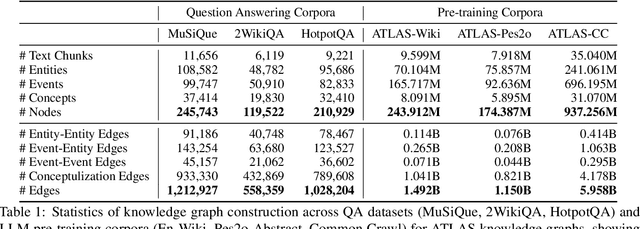
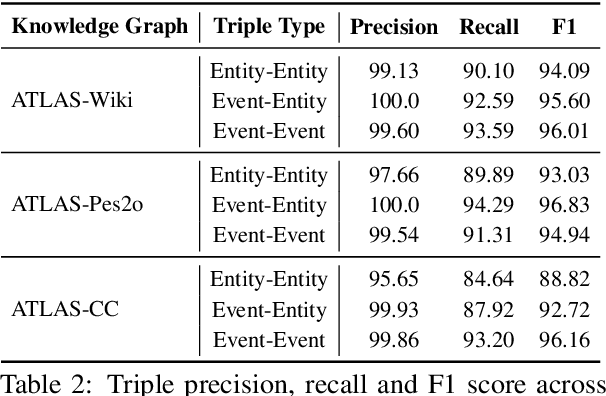

We present AutoSchemaKG, a framework for fully autonomous knowledge graph construction that eliminates the need for predefined schemas. Our system leverages large language models to simultaneously extract knowledge triples and induce comprehensive schemas directly from text, modeling both entities and events while employing conceptualization to organize instances into semantic categories. Processing over 50 million documents, we construct ATLAS (Automated Triple Linking And Schema induction), a family of knowledge graphs with 900+ million nodes and 5.9 billion edges. This approach outperforms state-of-the-art baselines on multi-hop QA tasks and enhances LLM factuality. Notably, our schema induction achieves 95\% semantic alignment with human-crafted schemas with zero manual intervention, demonstrating that billion-scale knowledge graphs with dynamically induced schemas can effectively complement parametric knowledge in large language models.
Controllable Logical Hypothesis Generation for Abductive Reasoning in Knowledge Graphs
May 27, 2025Abductive reasoning in knowledge graphs aims to generate plausible logical hypotheses from observed entities, with broad applications in areas such as clinical diagnosis and scientific discovery. However, due to a lack of controllability, a single observation may yield numerous plausible but redundant or irrelevant hypotheses on large-scale knowledge graphs. To address this limitation, we introduce the task of controllable hypothesis generation to improve the practical utility of abductive reasoning. This task faces two key challenges when controlling for generating long and complex logical hypotheses: hypothesis space collapse and hypothesis oversensitivity. To address these challenges, we propose CtrlHGen, a Controllable logcial Hypothesis Generation framework for abductive reasoning over knowledge graphs, trained in a two-stage paradigm including supervised learning and subsequent reinforcement learning. To mitigate hypothesis space collapse, we design a dataset augmentation strategy based on sub-logical decomposition, enabling the model to learn complex logical structures by leveraging semantic patterns in simpler components. To address hypothesis oversensitivity, we incorporate smoothed semantic rewards including Dice and Overlap scores, and introduce a condition-adherence reward to guide the generation toward user-specified control constraints. Extensive experiments on three benchmark datasets demonstrate that our model not only better adheres to control conditions but also achieves superior semantic similarity performance compared to baselines.
INFERENCEDYNAMICS: Efficient Routing Across LLMs through Structured Capability and Knowledge Profiling
May 22, 2025


Large Language Model (LLM) routing is a pivotal technique for navigating a diverse landscape of LLMs, aiming to select the best-performing LLMs tailored to the domains of user queries, while managing computational resources. However, current routing approaches often face limitations in scalability when dealing with a large pool of specialized LLMs, or in their adaptability to extending model scope and evolving capability domains. To overcome those challenges, we propose InferenceDynamics, a flexible and scalable multi-dimensional routing framework by modeling the capability and knowledge of models. We operate it on our comprehensive dataset RouteMix, and demonstrate its effectiveness and generalizability in group-level routing using modern benchmarks including MMLU-Pro, GPQA, BigGenBench, and LiveBench, showcasing its ability to identify and leverage top-performing models for given tasks, leading to superior outcomes with efficient resource utilization. The broader adoption of Inference Dynamics can empower users to harness the full specialized potential of the LLM ecosystem, and our code will be made publicly available to encourage further research.
Legal Rule Induction: Towards Generalizable Principle Discovery from Analogous Judicial Precedents
May 20, 2025Legal rules encompass not only codified statutes but also implicit adjudicatory principles derived from precedents that contain discretionary norms, social morality, and policy. While computational legal research has advanced in applying established rules to cases, inducing legal rules from judicial decisions remains understudied, constrained by limitations in model inference efficacy and symbolic reasoning capability. The advent of Large Language Models (LLMs) offers unprecedented opportunities for automating the extraction of such latent principles, yet progress is stymied by the absence of formal task definitions, benchmark datasets, and methodologies. To address this gap, we formalize Legal Rule Induction (LRI) as the task of deriving concise, generalizable doctrinal rules from sets of analogous precedents, distilling their shared preconditions, normative behaviors, and legal consequences. We introduce the first LRI benchmark, comprising 5,121 case sets (38,088 Chinese cases in total) for model tuning and 216 expert-annotated gold test sets. Experimental results reveal that: 1) State-of-the-art LLMs struggle with over-generalization and hallucination; 2) Training on our dataset markedly enhances LLMs capabilities in capturing nuanced rule patterns across similar cases.