 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Detection Classification via Clustering SVM for Various Robot Collaboration Task
May 05, 2024We introduce an advanced, swift pattern recognition strategy for various multiple robotics during curve negotiation. This method, leveraging a sophisticated k-means clustering-enhanced Support Vector Machine algorithm, distinctly categorizes robotics into flying or mobile robots. Initially, the paradigm considers robot locations and features as quintessential parameters indicative of divergent robot patterns. Subsequently, employing the k-means clustering technique facilitates the efficient segregation and consolidation of robotic data, significantly optimizing the support vector delineation process and expediting the recognition phase. Following this preparatory phase, the SVM methodology is adeptly applied to construct a discriminative hyperplane, enabling precise classification and prognostication of the robot category. To substantiate the efficacy and superiority of the k-means framework over traditional SVM approaches, a rigorous cross-validation experiment was orchestrated, evidencing the former's enhanced performance in robot group classification.
Self-supervised Cross-silo Federated Neural Architecture Search
Feb 18, 2021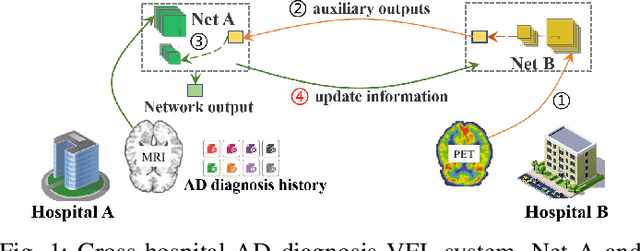
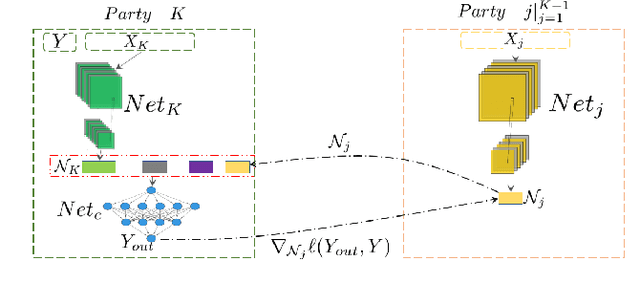
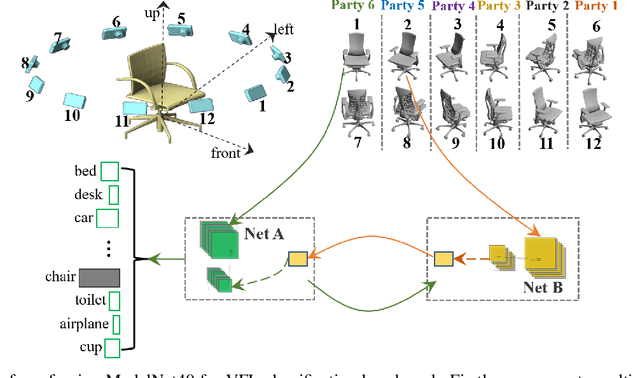
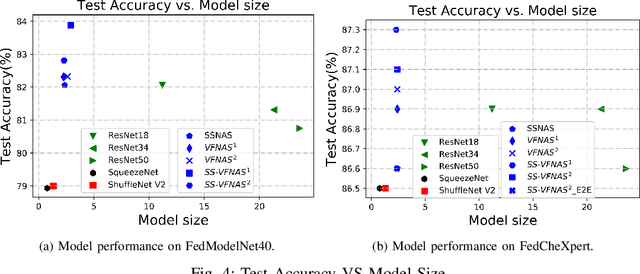
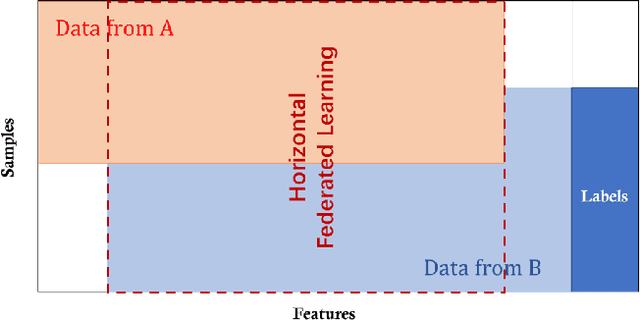
Federated Learning (FL) provides both model performance and data privacy for machine learning tasks where samples or features are distributed among different parties. In the training process of FL, no party has a global view of data distributions or model architectures of other parties. Thus the manually-designed architectures may not be optimal. In the past, Neural Architecture Search (NAS) has been applied to FL to address this critical issue. However, existing Federated NAS approaches require prohibitive communication and computation effort, as well as the availability of high-quality labels. In this work, we present Self-supervised Vertical Federated Neural Architecture Search (SS-VFNAS) for automating FL where participants hold feature-partitioned data, a common cross-silo scenario called Vertical Federated Learning (VFL). In the proposed framework, each party first conducts NAS using self-supervised approach to find a local optimal architecture with its own data. Then, parties collaboratively improve the local optimal architecture in a VFL framework with supervision. We demonstrate experimentally that our approach has superior performance, communication efficiency and privacy compared to Federated NAS and is capable of generating high-performance and highly-transferable heterogeneous architectures even with insufficient overlapping samples, providing automation for those parties without deep learning expertise.
Design Paradigms Based on Spring Agonists for Underactuated Robot Hands: Concepts and Application
Nov 06, 2020
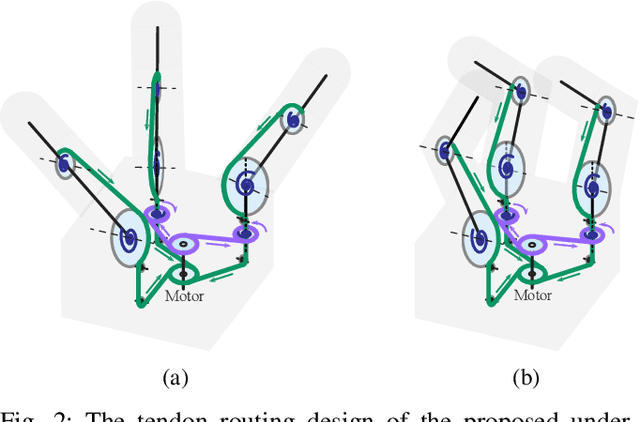
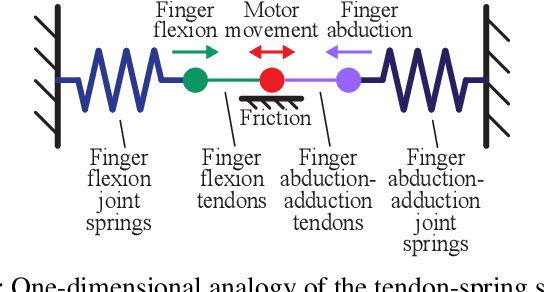
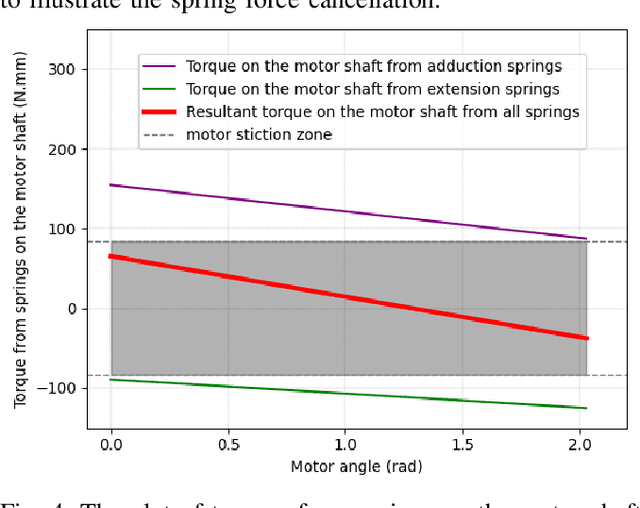
In this paper, we focus on a rarely used paradigm in the design of underactuated robot hands: the use of springs as agonists and tendons as antagonists. We formalize this approach in a design matrix also considering its interplay with the underactuation method used (one tendon for multiple joints vs. multiple tendons on one motor shaft). We then show how different cells in this design matrix can be combined in order to facilitate the implementation of desired postural synergies with a single motor. Furthermore, we show that when agonist and antagonist tendons are combined on the same motor shaft, the resulting spring force cancellation can be leveraged to produce multiple desirable behaviors, which we demonstrate in a physical prototype.
FedMVT: Semi-supervised Vertical Federated Learning with MultiView Training
Aug 25, 2020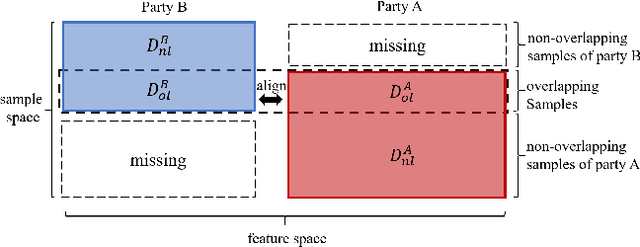
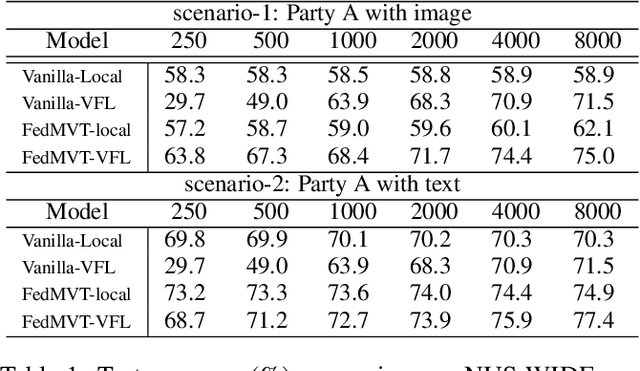
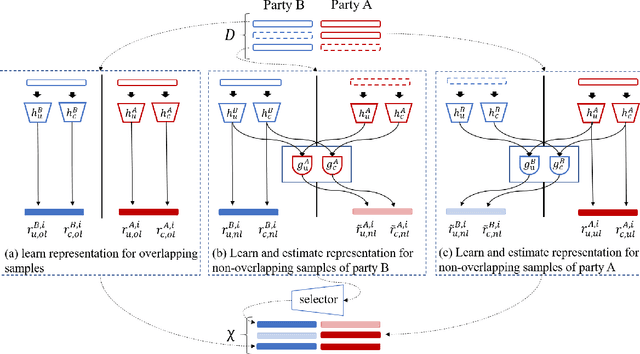
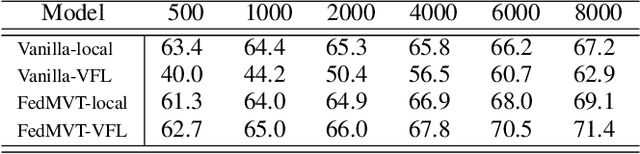
Federated learning allows many parties to collaboratively build a model without exposing data. Particularly, vertical federated learning (VFL) enables parties to build a robust shared machine learning model based upon distributed features about the same samples. However, VFL requires all parties to share a sufficient amount of overlapping samples. In reality, the set of overlapping samples may be small, leaving the majority of the non-overlapping data unutilized. In this paper, we propose Federated Multi-View Training (FedMVT), a semi-supervised learning approach that improves the performance of VFL with limited overlapping samples. FedMVT estimates representations for missing features and predicts pseudo-labels for unlabeled samples to expand training set, and trains three classifiers jointly based upon different views of the input to improve model's representation learning. FedMVT does not require parties to share their original data and model parameters, thus preserving data privacy. We conduct experiments on the NUS-WIDE and the CIFAR10. The experimental results demonstrate that FedMVT significantly outperforms vanilla VFL that only utilizes overlapping samples, and improves the performance of the local model in the party that owns labels.
Hardware as Policy: Mechanical and Computational Co-Optimization using Deep Reinforcement Learning
Aug 11, 2020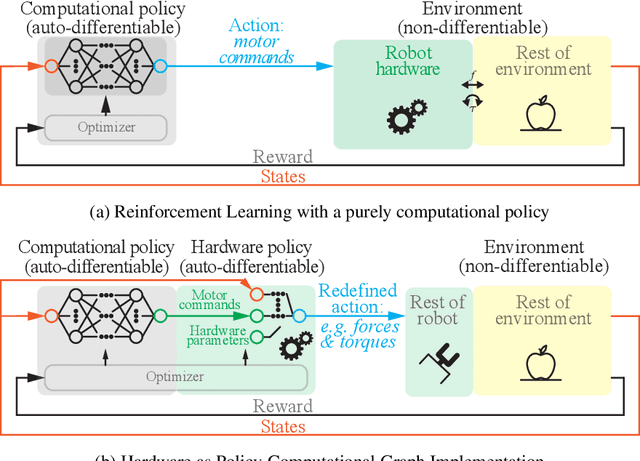
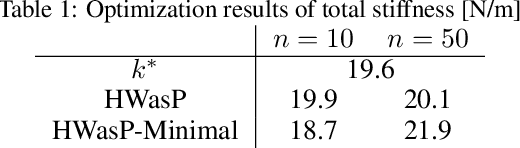
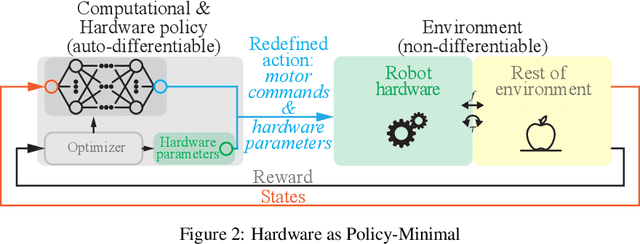

Deep Reinforcement Learning (RL) has shown great success in learning complex control policies for a variety of applications in robotics. However, in most such cases, the hardware of the robot has been considered immutable, modeled as part of the environment. In this study, we explore the problem of learning hardware and control parameters together in a unified RL framework. To achieve this, we propose to model aspects of the robot's hardware as a "mechanical policy", analogous to and optimized jointly with its computational counterpart. We show that, by modeling such mechanical policies as auto-differentiable computational graphs, the ensuing optimization problem can be solved efficiently by gradient-based algorithms from the Policy Optimization family. We present two such design examples: a toy mass-spring problem, and a real-world problem of designing an underactuated hand. We compare our method against traditional co-optimization approaches, and also demonstrate its effectiveness by building a physical prototype based on the learned hardware parameters.
Backdoor attacks and defenses in feature-partitioned collaborative learning
Jul 07, 2020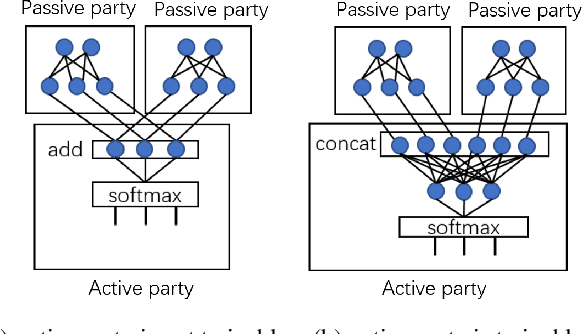
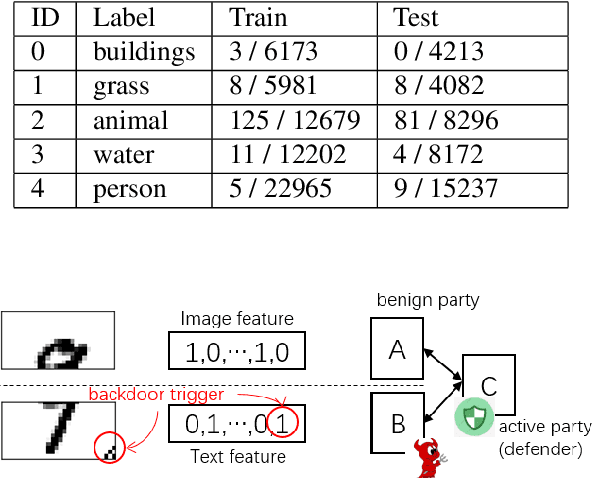
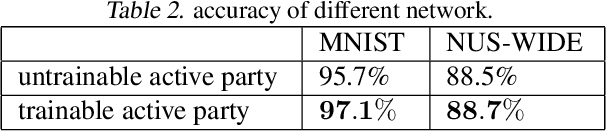
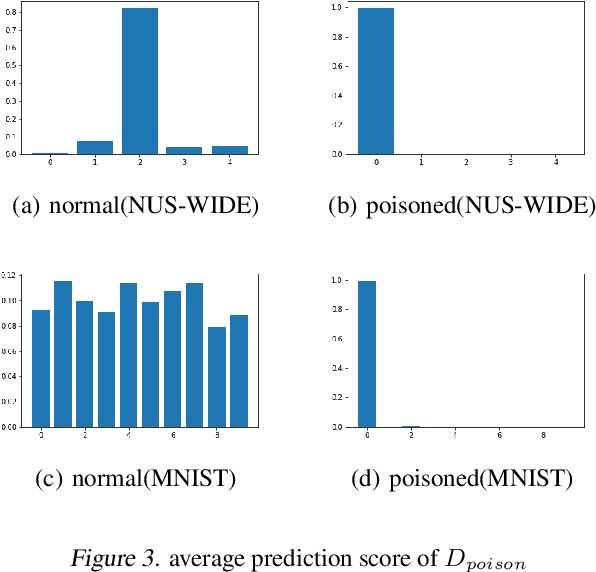
Since there are multiple parties in collaborative learning, malicious parties might manipulate the learning process for their own purposes through backdoor attacks. However, most of existing works only consider the federated learning scenario where data are partitioned by samples. The feature-partitioned learning can be another important scenario since in many real world applications, features are often distributed across different parties. Attacks and defenses in such scenario are especially challenging when the attackers have no labels and the defenders are not able to access the data and model parameters of other participants. In this paper, we show that even parties with no access to labels can successfully inject backdoor attacks, achieving high accuracy on both main and backdoor tasks. Next, we introduce several defense techniques, demonstrating that the backdoor can be successfully blocked by a combination of these techniques without hurting main task accuracy. To the best of our knowledge, this is the first systematical study to deal with backdoor attacks in the feature-partitioned collaborative learning framework.
Privacy-Preserving Technology to Help Millions of People: Federated Prediction Model for Stroke Prevention
Jun 15, 2020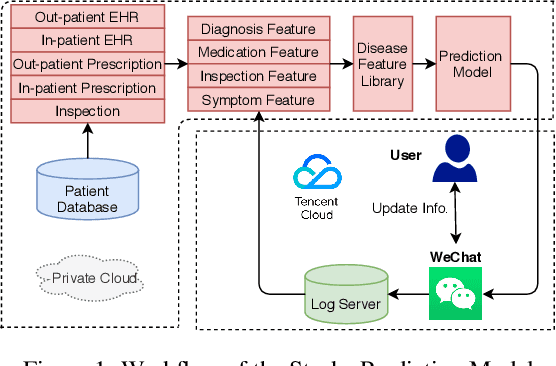
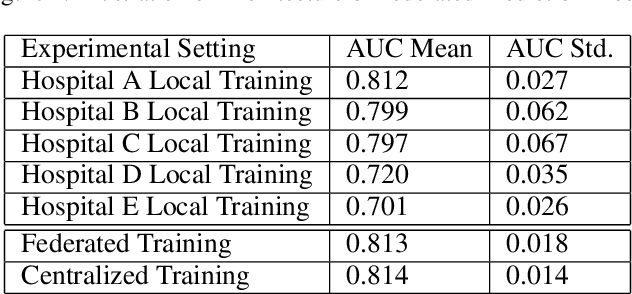
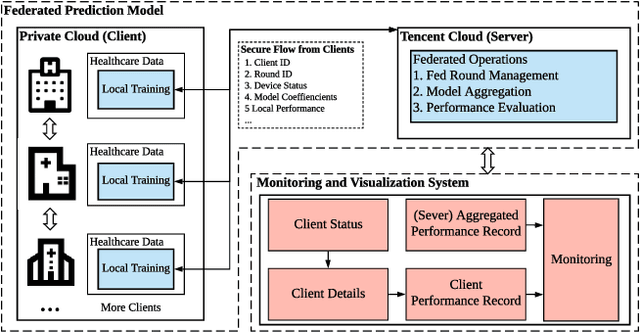
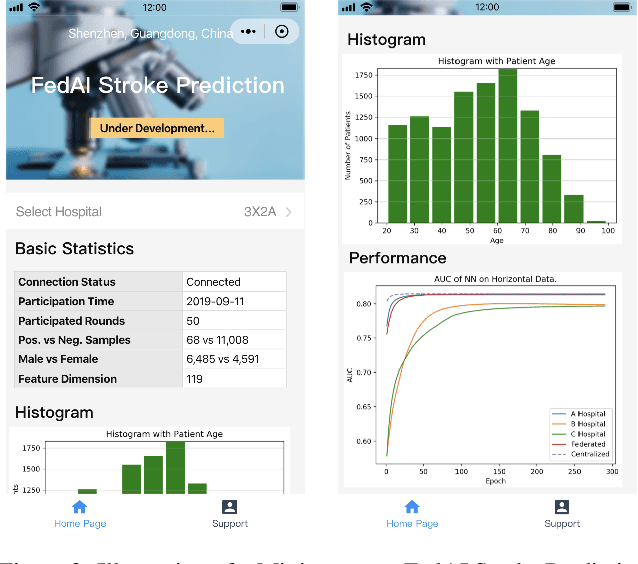
prevention of stroke with its associated risk factors has been one of the public health priorities worldwide. Emerging artificial intelligence technology is being increasingly adopted to predict stroke. Because of privacy concerns, patient data are stored in distributed electronic health record (EHR) databases, voluminous clinical datasets, which prevent patient data from being aggregated and restrains AI technology to boost the accuracy of stroke prediction with centralized training data. In this work, our scientists and engineers propose a privacy-preserving scheme to predict the risk of stroke and deploy our federated prediction model on cloud servers. Our system of federated prediction model asynchronously supports any number of client connections and arbitrary local gradient iterations in each communication round. It adopts federated averaging during the model training process, without patient data being taken out of the hospitals during the whole process of model training and forecasting. With the privacy-preserving mechanism, our federated prediction model trains over all the healthcare data from hospitals in a certain city without actual data sharing among them. Therefore, it is not only secure but also more accurate than any single prediction model that trains over the data only from one single hospital. Especially for small hospitals with few confirmed stroke cases, our federated model boosts model performance by 10%~20% in several machine learning metrics. To help stroke experts comprehend the advantage of our prediction system more intuitively, we developed a mobile app that collects the key information of patients' statistics and demonstrates performance comparisons between the federated prediction model and the single prediction model during the federated training process.
Learning to Detect Malicious Clients for Robust Federated Learning
Feb 01, 2020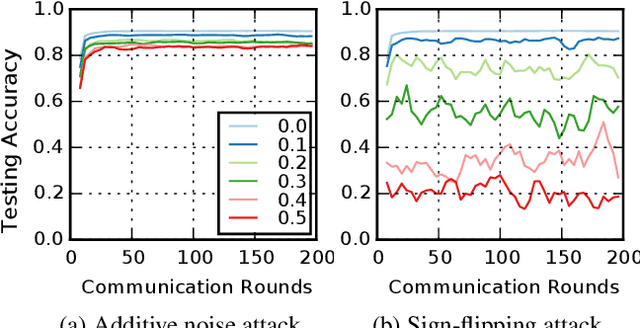
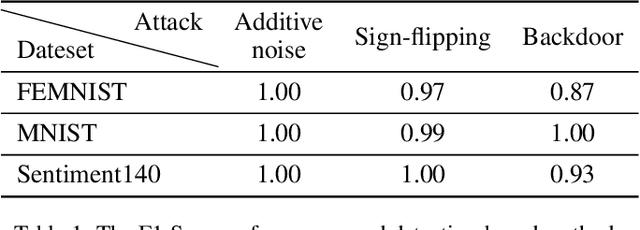
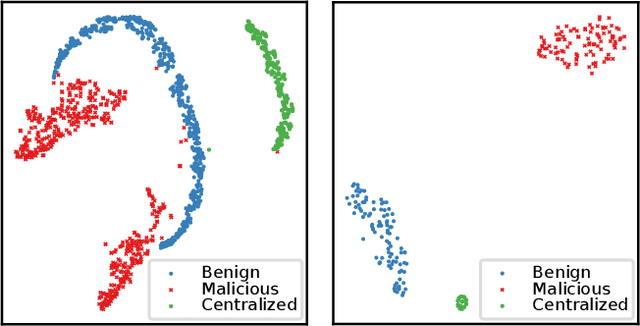
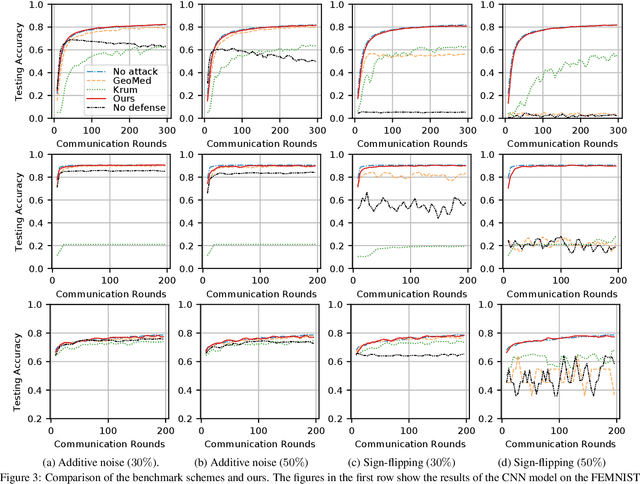
Federated learning systems are vulnerable to attacks from malicious clients. As the central server in the system cannot govern the behaviors of the clients, a rogue client may initiate an attack by sending malicious model updates to the server, so as to degrade the learning performance or enforce targeted model poisoning attacks (a.k.a. backdoor attacks). Therefore, timely detecting these malicious model updates and the underlying attackers becomes critically important. In this work, we propose a new framework for robust federated learning where the central server learns to detect and remove the malicious model updates using a powerful detection model, leading to targeted defense. We evaluate our solution in both image classification and sentiment analysis tasks with a variety of machine learning models. Experimental results show that our solution ensures robust federated learning that is resilient to both the Byzantine attacks and the targeted model poisoning attacks.
RPN: A Residual Pooling Network for Efficient Federated Learning
Jan 23, 2020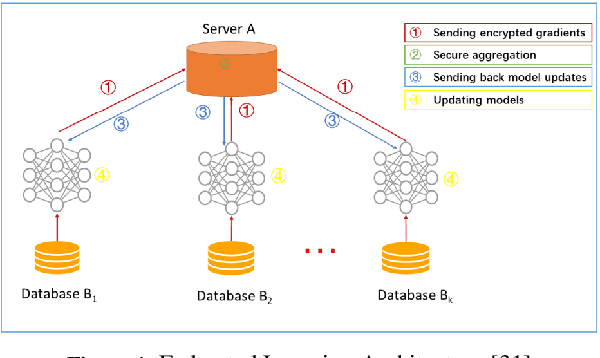
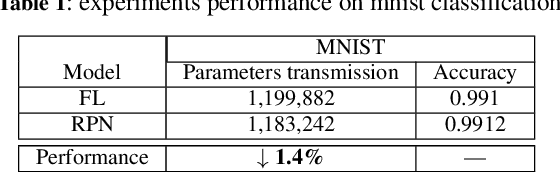
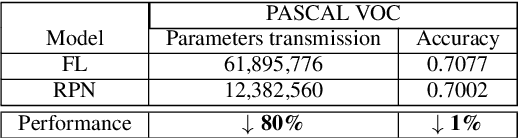
Federated learning is a new machine learning framework which enables different parties to collaboratively train a model while protecting data privacy and security. Due to model complexity, network unreliability and connection in-stability, communication cost has became a major bottleneck for applying federated learning to real-world applications. Current existing strategies are either need to manual setting for hyper-parameters, or break up the original process into multiple steps, which make it hard to realize end-to-end implementation. In this paper, we propose a novel compression strategy called Residual Pooling Network (RPN). Our experiments show that RPN not only reduce data transmission effectively, but also achieve almost the same performance as compared to standard federated learning. Our new approach performs as an end-to-end procedure, which should be readily applied to all CNN-based model training scenarios for improvement of communication efficiency, and hence make it easy to deploy in real-world application without human intervention.
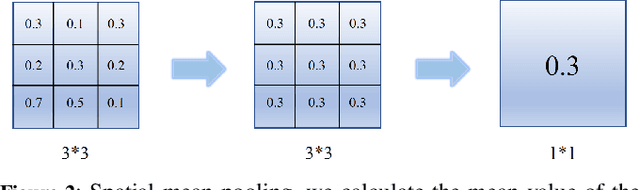
FedVision: An Online Visual Object Detection Platform Powered by Federated Learning
Jan 17, 2020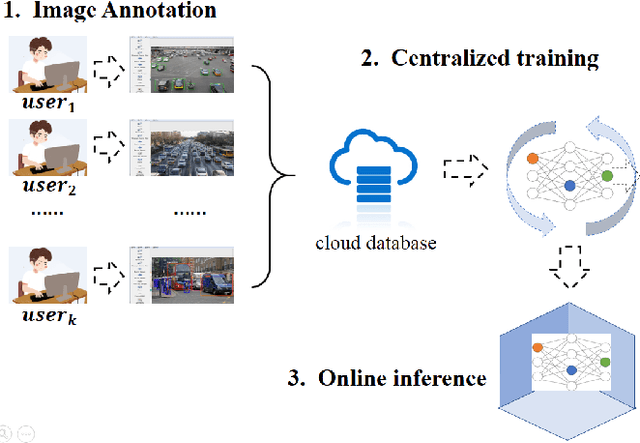
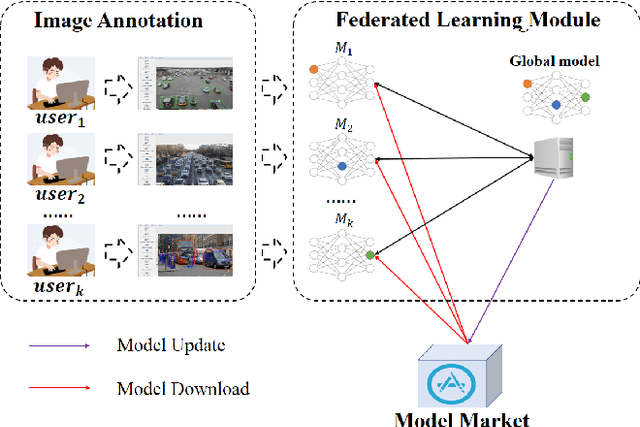
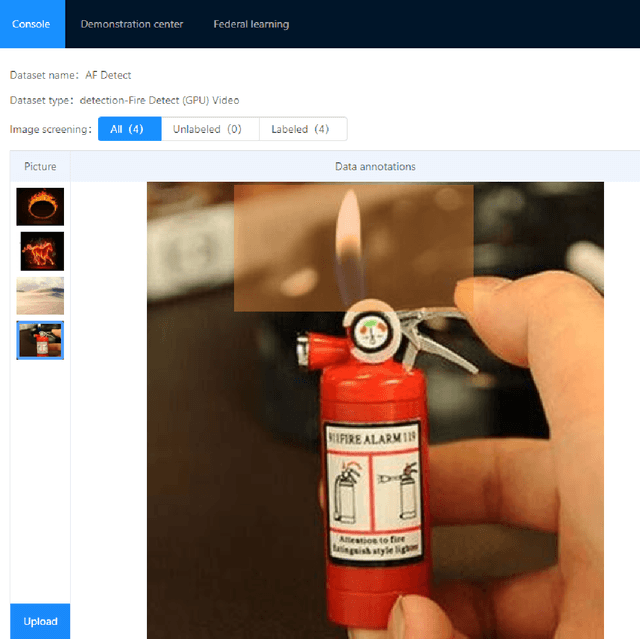
Visual object detection is a computer vision-based artificial intelligence (AI) technique which has many practical applications (e.g., fire hazard monitoring). However, due to privacy concerns and the high cost of transmitting video data, it is highly challenging to build object detection models on centrally stored large training datasets following the current approach. Federated learning (FL) is a promising approach to resolve this challenge. Nevertheless, there currently lacks an easy to use tool to enable computer vision application developers who are not experts in federated learning to conveniently leverage this technology and apply it in their systems. In this paper, we report FedVision - a machine learning engineering platform to support the development of federated learning powered computer vision applications. The platform has been deployed through a collaboration between WeBank and Extreme Vision to help customers develop computer vision-based safety monitoring solutions in smart city applications. Over four months of usage, it has achieved significant efficiency improvement and cost reduction while removing the need to transmit sensitive data for three major corporate customers. To the best of our knowledge, this is the first real application of FL in computer vision-based tasks.