 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLegoDiffusion: Micro-Serving Text-to-Image Diffusion Workflows
Apr 09, 2026Text-to-image generation executes a diffusion workflow comprising multiple models centered on a base diffusion model. Existing serving systems treat each workflow as an opaque monolith, provisioning, placing, and scaling all constituent models together, which obscures internal dataflow, prevents model sharing, and enforces coarse-grained resource management. In this paper, we make a case for micro-serving diffusion workflows with LegoDiffusion, a system that decomposes a workflow into loosely coupled model-execution nodes that can be independently managed and scheduled. By explicitly managing individual model inference, LegoDiffusion unlocks cluster-scale optimizations, including per-model scaling, model sharing, and adaptive model parallelism. Collectively, LegoDiffusion outperforms existing diffusion workflow serving systems, sustaining up to 3x higher request rates and tolerating up to 8x higher burst traffic.
OpenPRC: A Unified Open-Source Framework for Physics-to-Task Evaluation in Physical Reservoir Computing
Apr 08, 2026Physical Reservoir Computing (PRC) leverages the intrinsic nonlinear dynamics of physical substrates, mechanical, optical, spintronic, and beyond, as fixed computational reservoirs, offering a compelling paradigm for energy-efficient and embodied machine learning. However, the practical workflow for developing and evaluating PRC systems remains fragmented: existing tools typically address only isolated parts of the pipeline, such as substrate-specific simulation, digital reservoir benchmarking, or readout training. What is missing is a unified framework that can represent both high-fidelity simulated trajectories and real experimental measurements through the same data interface, enabling reproducible evaluation, analysis, and physics-aware optimization across substrates and data sources. We present OpenPRC, an open-source Python framework that fills this gap through a schema-driven physics-to-task pipeline built around five modules: a GPU-accelerated hybrid RK4-PBD physics engine (demlat), a video-based experimental ingestion layer (openprc.vision), a modular learning layer (reservoir), information-theoretic analysis and benchmarking tools (analysis), and physics-aware optimization (optimize). A universal HDF5 schema enforces reproducibility and interoperability, allowing GPU-simulated and experimentally acquired trajectories to enter the same downstream workflow without modification. Demonstrated capabilities include simulations of Origami tessellations, video-based trajectory extraction from a physical reservoir, and a common interface for standardized PRC benchmarking, correlation diagnostics, and capacity analysis. The longer-term vision is to serve as a standardizing layer for the PRC community, compatible with external physics engines including PyBullet, PyElastica, and MERLIN.
InstGenIE: Generative Image Editing Made Efficient with Mask-aware Caching and Scheduling
May 27, 2025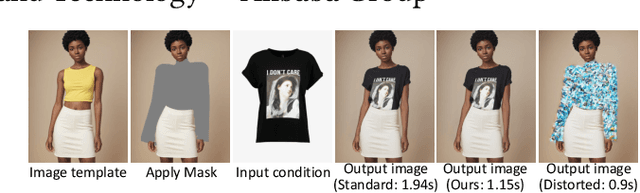
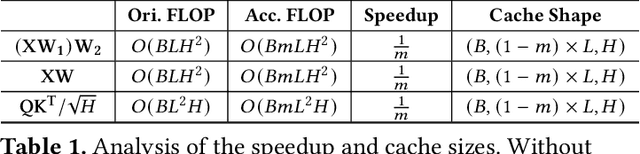
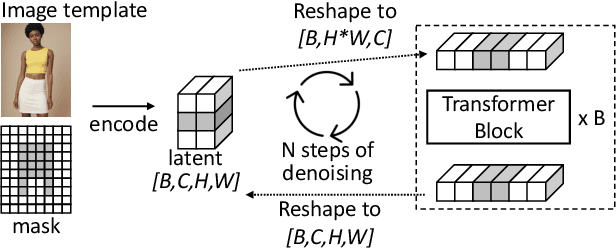
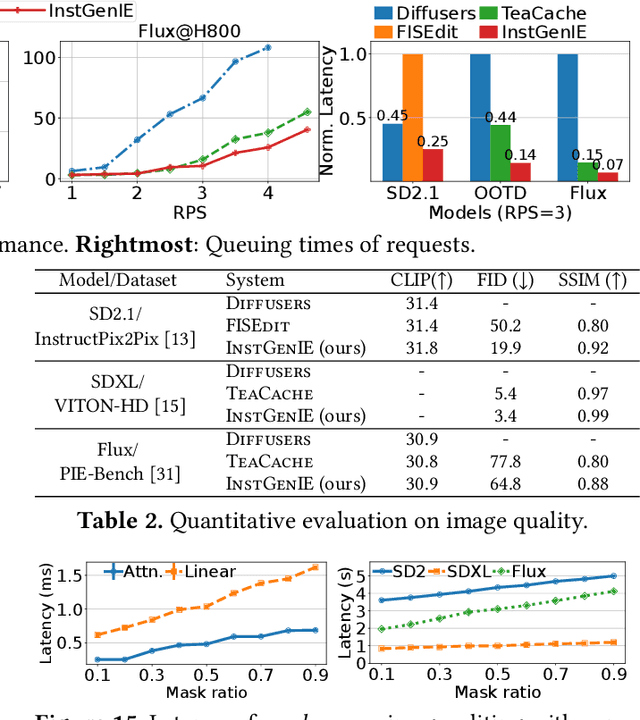
Generative image editing using diffusion models has become a prevalent application in today's AI cloud services. In production environments, image editing typically involves a mask that specifies the regions of an image template to be edited. The use of masks provides direct control over the editing process and introduces sparsity in the model inference. In this paper, we present InstGenIE, a system that efficiently serves image editing requests. The key insight behind InstGenIE is that image editing only modifies the masked regions of image templates while preserving the original content in the unmasked areas. Driven by this insight, InstGenIE judiciously skips redundant computations associated with the unmasked areas by reusing cached intermediate activations from previous inferences. To mitigate the high cache loading overhead, InstGenIE employs a bubble-free pipeline scheme that overlaps computation with cache loading. Additionally, to reduce queuing latency in online serving while improving the GPU utilization, InstGenIE proposes a novel continuous batching strategy for diffusion model serving, allowing newly arrived requests to join the running batch in just one step of denoising computation, without waiting for the entire batch to complete. As heterogeneous masks induce imbalanced loads, InstGenIE also develops a load balancing strategy that takes into account the loads of both computation and cache loading. Collectively, InstGenIE outperforms state-of-the-art diffusion serving systems for image editing, achieving up to 3x higher throughput and reducing average request latency by up to 14.7x while ensuring image quality.
Hyper Yoshimura: How a slight tweak on a classical folding pattern unleashes meta-stability for deployable robots
May 15, 2025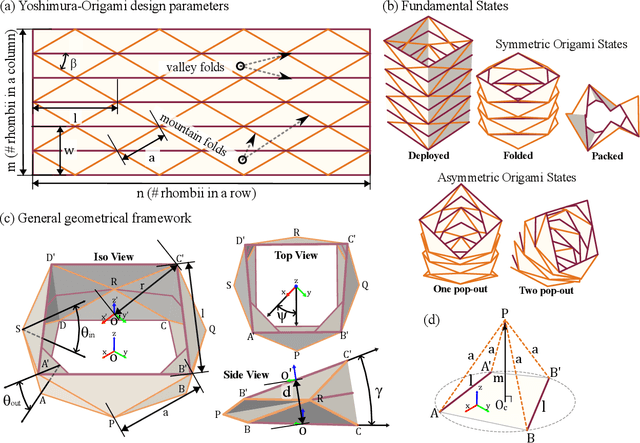
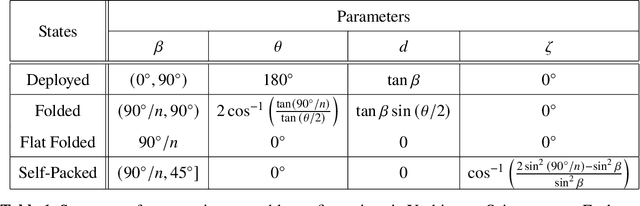
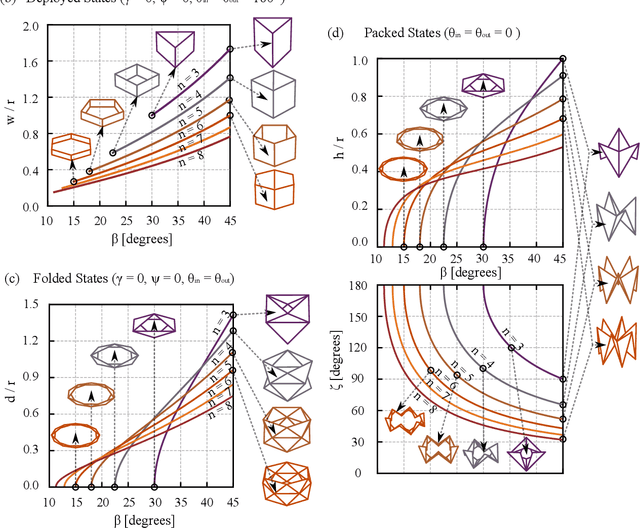

Deployable structures inspired by origami offer lightweight, compact, and reconfigurable solutions for robotic and architectural applications. We present a geometric and mechanical framework for Yoshimura-Ori modules that supports a diverse set of metastable states, including newly identified asymmetric "pop-out" and "hyperfolded" configurations. These states are governed by three parameters -- tilt angle, phase shift, and slant height -- and enable discrete, programmable transformations. Using this model, we develop forward and inverse kinematic strategies to stack modules into deployable booms that approximate complex 3D shapes. We validate our approach through mechanical tests and demonstrate a tendon- and pneumatically-actuated Yoshimura Space Crane capable of object manipulation, solar tracking, and high load-bearing performance. A meter-scale solar charging station further illustrates the design's scalability. These results establish Yoshimura-Ori structures as a promising platform for adaptable, multifunctional deployable systems in both terrestrial and space environments.
Re-purposing a modular origami manipulator into an adaptive physical computer for machine learning and robotic perception
May 05, 2025



Physical computing has emerged as a powerful tool for performing intelligent tasks directly in the mechanical domain of functional materials and robots, reducing our reliance on the more traditional COMS computers. However, no systematic study explains how mechanical design can influence physical computing performance. This study sheds insights into this question by repurposing an origami-inspired modular robotic manipulator into an adaptive physical reservoir and systematically evaluating its computing capacity with different physical configurations, input setups, and computing tasks. By challenging this adaptive reservoir computer to complete the classical NARMA benchmark tasks, this study shows that its time series emulation performance directly correlates to the Peak Similarity Index (PSI), which quantifies the frequency spectrum correlation between the target output and reservoir dynamics. The adaptive reservoir also demonstrates perception capabilities, accurately extracting its payload weight and orientation information from the intrinsic dynamics. Importantly, such information extraction capability can be measured by the spatial correlation between nodal dynamics within the reservoir body. Finally, by integrating shape memory alloy (SMA) actuation, this study demonstrates how to exploit such computing power embodied in the physical body for practical, robotic operations. This study provides a strategic framework for harvesting computing power from soft robots and functional materials, demonstrating how design parameters and input selection can be configured based on computing task requirements. Extending this framework to bio-inspired adaptive materials, prosthetics, and self-adaptive soft robotic systems could enable next-generation embodied intelligence, where the physical structure can compute and interact with their digital counterparts.
Embodied multi-modal sensing with a soft modular arm powered by physical reservoir computing
Mar 09, 2025Soft robots have become increasingly popular for complex manipulation tasks requiring gentle and safe contact. However, their softness makes accurate control challenging, and high-fidelity sensing is a prerequisite to adequate control performance. To this end, many flexible and embedded sensors have been created over the past decade, but they inevitably increase the robot's complexity and stiffness. This study demonstrates a novel approach that uses simple bending strain gauges embedded inside a modular arm to extract complex information regarding its deformation and working conditions. The core idea is based on physical reservoir computing (PRC): A soft body's rich nonlinear dynamic responses, captured by the inter-connected bending sensor network, could be utilized for complex multi-modal sensing with a simple linear regression algorithm. Our results show that the soft modular arm reservoir can accurately predict body posture (bending angle), estimate payload weight, determine payload orientation, and even differentiate two payloads with only minimal difference in weight -- all using minimal digital computing power.
Proprioceptive and Exteroceptive Information Perception in a Fabric Soft Robotic Arm via Physical Reservoir Computing with minimal training data
Nov 11, 2024



Over the past decades, we have witnessed a rapid emergence of soft and reconfigurable robots thanks to their capability to interact safely with humans and adapt to complex environments. However, their softness makes accurate control very challenging. High-fidelity sensing is critical in improving control performance, especially posture and contact estimation. To this end, traditional camera-based sensors and load cells have limited portability and accuracy, and they will inevitably increase the robot's cost and weight. In this study, instead of using specialized sensors, we only collect distributed pressure data inside a pneumatics-driven soft arm and apply the physical reservoir computing principle to simultaneously predict its kinematic posture (i.e., bending angle) and payload status (i.e., payload mass). Our results show that, with careful readout training, one can obtain accurate bending angle and payload mass predictions via simple, weighted linear summations of pressure readings. In addition, our comparative analysis shows that, to guarantee low prediction errors within 10\%, bending angle prediction requires less training data than payload prediction. This result reveals that balanced linear and nonlinear body dynamics are critical for the physical reservoir to accomplish complex proprioceptive and exteroceptive information perception tasks. Finally, the method of exploring the most efficient readout training methods presented in this paper could be extended to other soft robotic systems to maximize their perception capabilities.
SwiftDiffusion: Efficient Diffusion Model Serving with Add-on Modules
Jul 02, 2024



This paper documents our characterization study and practices for serving text-to-image requests with stable diffusion models in production. We first comprehensively analyze inference request traces for commercial text-to-image applications. It commences with our observation that add-on modules, i.e., ControlNets and LoRAs, that augment the base stable diffusion models, are ubiquitous in generating images for commercial applications. Despite their efficacy, these add-on modules incur high loading overhead, prolong the serving latency, and swallow up expensive GPU resources. Driven by our characterization study, we present SwiftDiffusion, a system that efficiently generates high-quality images using stable diffusion models and add-on modules. To achieve this, SwiftDiffusion reconstructs the existing text-to-image serving workflow by identifying the opportunities for parallel computation and distributing ControlNet computations across multiple GPUs. Further, SwiftDiffusion thoroughly analyzes the dynamics of image generation and develops techniques to eliminate the overhead associated with LoRA loading and patching while preserving the image quality. Last, SwiftDiffusion proposes specialized optimizations in the backbone architecture of the stable diffusion models, which are also compatible with the efficient serving of add-on modules. Compared to state-of-the-art text-to-image serving systems, SwiftDiffusion reduces serving latency by up to 5x and improves serving throughput by up to 2x without compromising image quality.
Contextual Interaction via Primitive-based Adversarial Training For Compositional Zero-shot Learning
Jun 21, 2024
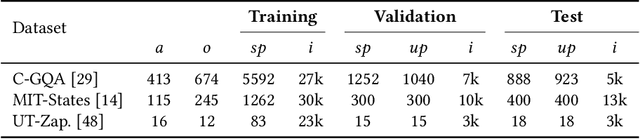

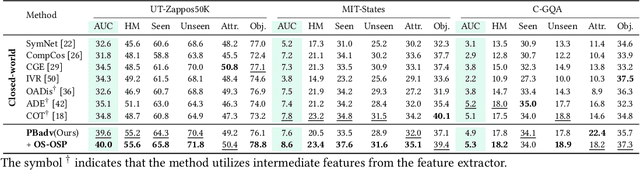
Compositional Zero-shot Learning (CZSL) aims to identify novel compositions via known attribute-object pairs. The primary challenge in CZSL tasks lies in the significant discrepancies introduced by the complex interaction between the visual primitives of attribute and object, consequently decreasing the classification performance towards novel compositions. Previous remarkable works primarily addressed this issue by focusing on disentangling strategy or utilizing object-based conditional probabilities to constrain the selection space of attributes. Unfortunately, few studies have explored the problem from the perspective of modeling the mechanism of visual primitive interactions. Inspired by the success of vanilla adversarial learning in Cross-Domain Few-Shot Learning, we take a step further and devise a model-agnostic and Primitive-Based Adversarial training (PBadv) method to deal with this problem. Besides, the latest studies highlight the weakness of the perception of hard compositions even under data-balanced conditions. To this end, we propose a novel over-sampling strategy with object-similarity guidance to augment target compositional training data. We performed detailed quantitative analysis and retrieval experiments on well-established datasets, such as UT-Zappos50K, MIT-States, and C-GQA, to validate the effectiveness of our proposed method, and the state-of-the-art (SOTA) performance demonstrates the superiority of our approach. The code is available at https://github.com/lisuyi/PBadv_czsl.
"Golden Ratio Yoshimura" for Meta-Stable and Massively Reconfigurable Deployment
May 28, 2024Yoshimura origami is a classical folding pattern that has inspired many deployable structure designs. Its applications span from space exploration, kinetic architectures, and soft robots to even everyday household items. However, despite its wide usage, Yoshimura has been fixated on a set of design constraints to ensure its flat-foldability. Through extensive kinematic analysis and prototype tests, this study presents a new Yoshimura that intentionally defies these constraints. Remarkably, one can impart a unique meta-stability by using the Golden Ratio angle to define the triangular facets of a generalized Yoshimura. As a result, when its facets are strategically popped out, a ``Golden Ratio Yoshimura'' boom with $m$ modules can be theoretically reconfigured into $8^m$ geometrically unique and load-bearing shapes. This result not only challenges the existing design norms but also opens up a new avenue to create deployable and versatile structural systems.