 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenPRC: A Unified Open-Source Framework for Physics-to-Task Evaluation in Physical Reservoir Computing
Apr 08, 2026Physical Reservoir Computing (PRC) leverages the intrinsic nonlinear dynamics of physical substrates, mechanical, optical, spintronic, and beyond, as fixed computational reservoirs, offering a compelling paradigm for energy-efficient and embodied machine learning. However, the practical workflow for developing and evaluating PRC systems remains fragmented: existing tools typically address only isolated parts of the pipeline, such as substrate-specific simulation, digital reservoir benchmarking, or readout training. What is missing is a unified framework that can represent both high-fidelity simulated trajectories and real experimental measurements through the same data interface, enabling reproducible evaluation, analysis, and physics-aware optimization across substrates and data sources. We present OpenPRC, an open-source Python framework that fills this gap through a schema-driven physics-to-task pipeline built around five modules: a GPU-accelerated hybrid RK4-PBD physics engine (demlat), a video-based experimental ingestion layer (openprc.vision), a modular learning layer (reservoir), information-theoretic analysis and benchmarking tools (analysis), and physics-aware optimization (optimize). A universal HDF5 schema enforces reproducibility and interoperability, allowing GPU-simulated and experimentally acquired trajectories to enter the same downstream workflow without modification. Demonstrated capabilities include simulations of Origami tessellations, video-based trajectory extraction from a physical reservoir, and a common interface for standardized PRC benchmarking, correlation diagnostics, and capacity analysis. The longer-term vision is to serve as a standardizing layer for the PRC community, compatible with external physics engines including PyBullet, PyElastica, and MERLIN.
Hyper Yoshimura: How a slight tweak on a classical folding pattern unleashes meta-stability for deployable robots
May 15, 2025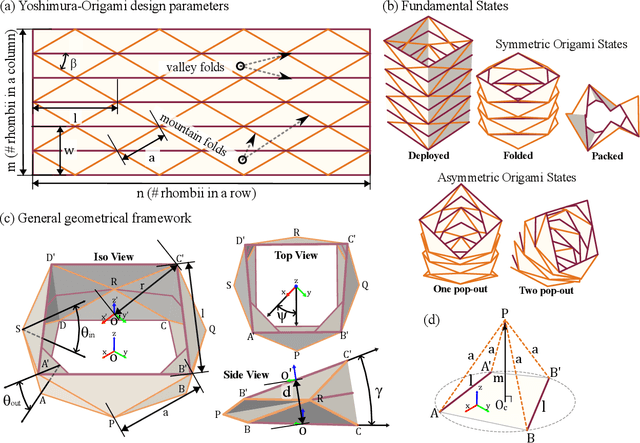
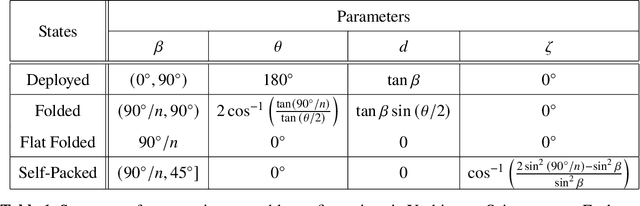
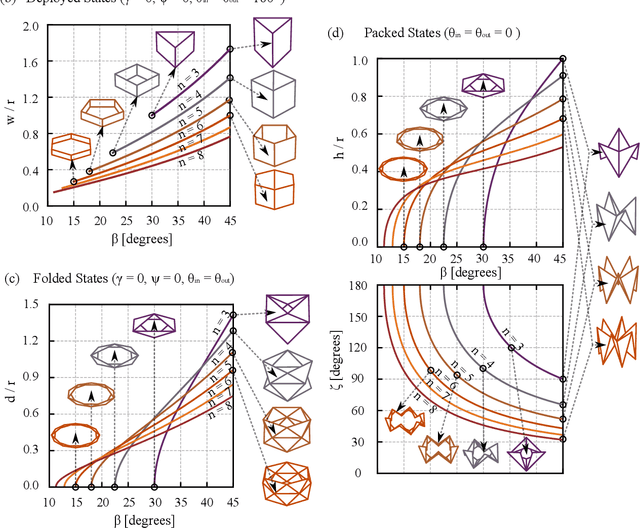

Deployable structures inspired by origami offer lightweight, compact, and reconfigurable solutions for robotic and architectural applications. We present a geometric and mechanical framework for Yoshimura-Ori modules that supports a diverse set of metastable states, including newly identified asymmetric "pop-out" and "hyperfolded" configurations. These states are governed by three parameters -- tilt angle, phase shift, and slant height -- and enable discrete, programmable transformations. Using this model, we develop forward and inverse kinematic strategies to stack modules into deployable booms that approximate complex 3D shapes. We validate our approach through mechanical tests and demonstrate a tendon- and pneumatically-actuated Yoshimura Space Crane capable of object manipulation, solar tracking, and high load-bearing performance. A meter-scale solar charging station further illustrates the design's scalability. These results establish Yoshimura-Ori structures as a promising platform for adaptable, multifunctional deployable systems in both terrestrial and space environments.
"Golden Ratio Yoshimura" for Meta-Stable and Massively Reconfigurable Deployment
May 28, 2024Yoshimura origami is a classical folding pattern that has inspired many deployable structure designs. Its applications span from space exploration, kinetic architectures, and soft robots to even everyday household items. However, despite its wide usage, Yoshimura has been fixated on a set of design constraints to ensure its flat-foldability. Through extensive kinematic analysis and prototype tests, this study presents a new Yoshimura that intentionally defies these constraints. Remarkably, one can impart a unique meta-stability by using the Golden Ratio angle to define the triangular facets of a generalized Yoshimura. As a result, when its facets are strategically popped out, a ``Golden Ratio Yoshimura'' boom with $m$ modules can be theoretically reconfigured into $8^m$ geometrically unique and load-bearing shapes. This result not only challenges the existing design norms but also opens up a new avenue to create deployable and versatile structural systems.
Design, Modelling and Control of SPIROS: The Six Propellers and Intermeshing Rotors Based Omnidirectional Spherical Robot
Jul 01, 2021



Since the past few decades, several designs and control methods have been developed for the Spherical Robots (SRs) with thoroughly analyzed mechanics on generalized 3D terrains. But the vertical motion and the steep inclination maneuver has been an unsolved problem with the existing SR's driving mechanisms. Also, the possibilities of wind-powered or air-propelled SRs have not been fully explored. This paper introduces the new Omnidirectional Spherical Robot mechanism named SPIROS: The Six Propeller and Intermeshed Rotor based Omnidirectional Spherical Robot. The SPIROS is driven by a novel octahedral arrangement of six intermeshed rotary air thrusters placed in the Goldberg Polyhedral shaped spherical gridshell. The advantage of the proposed design lies in its air-powered propulsion, which improves on the obstacle avoidance and the slope climbing abilities. The robot's dynamic models are derived using the existing kinematical models of the Continuous Rolling Spherical Robots (CR-SR), with subcategories, triple axes rolling (3R-SR), dual axes rolling (2R-SR) and rolling and turning (RT-SR) spherical robots. The path tracking control scheme based on the pure pursuit algorithm is presented. Simulations are carried out in MATLAB and Simulink to validate the developed models and the effectiveness of the proposed control schemes.
Design and Development of Autonomous Delivery Robot
Mar 16, 2021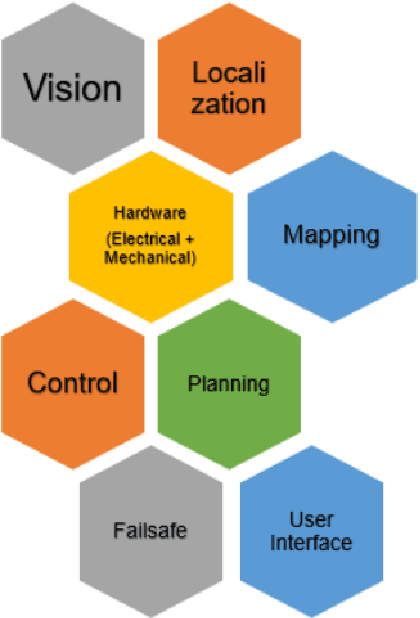
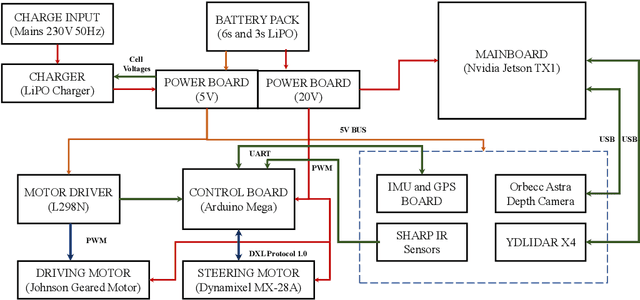
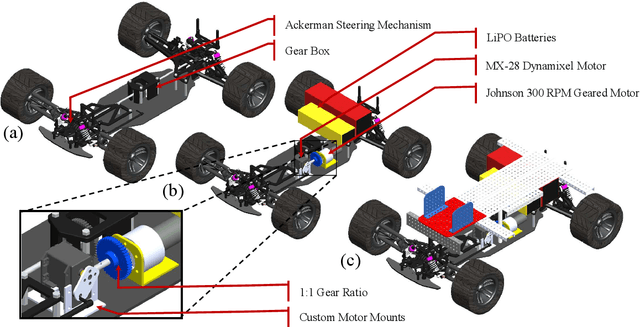

The field of autonomous robotics is growing at a rapid rate. The trend to use increasingly more sensors in vehicles is driven both by legislation and consumer demands for higher safety and reliable service. Nowadays, robots are found everywhere, ranging from homes, hospitals to industries, and military operations. Autonomous robots are developed to be robust enough to work beside humans and to carry out jobs efficiently. Humans have a natural sense of understanding of the physical forces acting around them like gravity, sense of motion, etc. which are not taught explicitly but are developed naturally. However, this is not the case with robots. To make the robot fully autonomous and competent to work with humans, the robot must be able to perceive the situation and devise a plan for smooth operation, considering all the adversities that may occur while carrying out the tasks. In this thesis, we present an autonomous mobile robot platform that delivers the package within the VNIT campus without any human intercommunication. From an initial user-supplied geographic target location, the system plans an optimized path and autonomously navigates through it. The entire pipeline of an autonomous robot working in outdoor environments is explained in detail in this thesis.