 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROS2-Based Simulation Framework for Cyberphysical Security Analysis of UAVs
Oct 04, 2024We present a new simulator of Uncrewed Aerial Vehicles (UAVs) that is tailored to the needs of testing cyber-physical security attacks and defenses. Recent investigations into UAV safety have unveiled various attack surfaces and some defense mechanisms. However, due to escalating regulations imposed by aviation authorities on security research on real UAVs, and the substantial costs associated with hardware test-bed configurations, there arises a necessity for a simulator capable of substituting for hardware experiments, and/or narrowing down their scope to the strictly necessary. The study of different attack mechanisms requires specific features in a simulator. We propose a simulation framework based on ROS2, leveraging some of its key advantages, including modularity, replicability, customization, and the utilization of open-source tools such as Gazebo. Our framework has a built-in motion planner, controller, communication models and attack models. We share examples of research use cases that our framework can enable, demonstrating its utility.
Design and Development of Autonomous Delivery Robot
Mar 16, 2021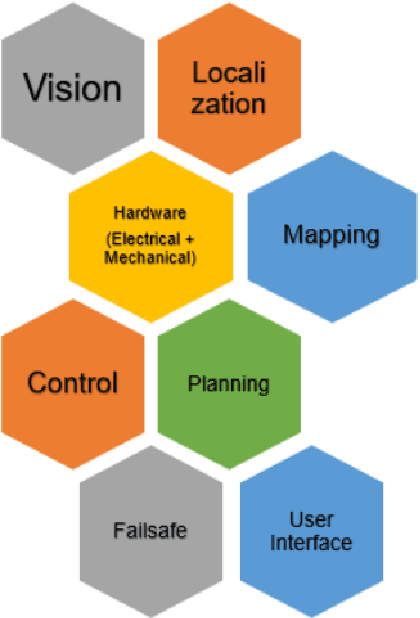
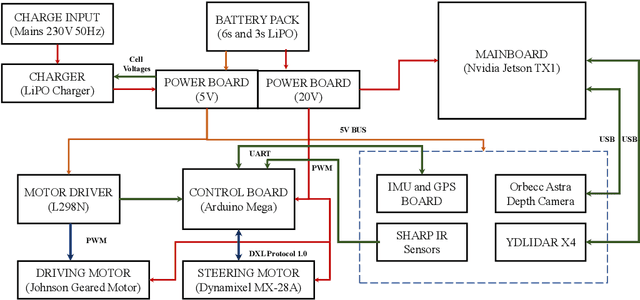
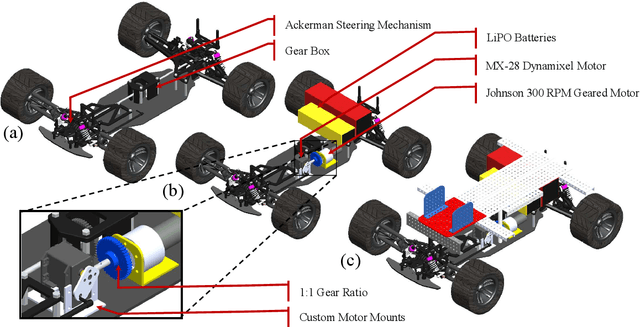

The field of autonomous robotics is growing at a rapid rate. The trend to use increasingly more sensors in vehicles is driven both by legislation and consumer demands for higher safety and reliable service. Nowadays, robots are found everywhere, ranging from homes, hospitals to industries, and military operations. Autonomous robots are developed to be robust enough to work beside humans and to carry out jobs efficiently. Humans have a natural sense of understanding of the physical forces acting around them like gravity, sense of motion, etc. which are not taught explicitly but are developed naturally. However, this is not the case with robots. To make the robot fully autonomous and competent to work with humans, the robot must be able to perceive the situation and devise a plan for smooth operation, considering all the adversities that may occur while carrying out the tasks. In this thesis, we present an autonomous mobile robot platform that delivers the package within the VNIT campus without any human intercommunication. From an initial user-supplied geographic target location, the system plans an optimized path and autonomously navigates through it. The entire pipeline of an autonomous robot working in outdoor environments is explained in detail in this thesis.