Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign Paradigms Based on Spring Agonists for Underactuated Robot Hands: Concepts and Application
Paper and Code
Nov 06, 2020
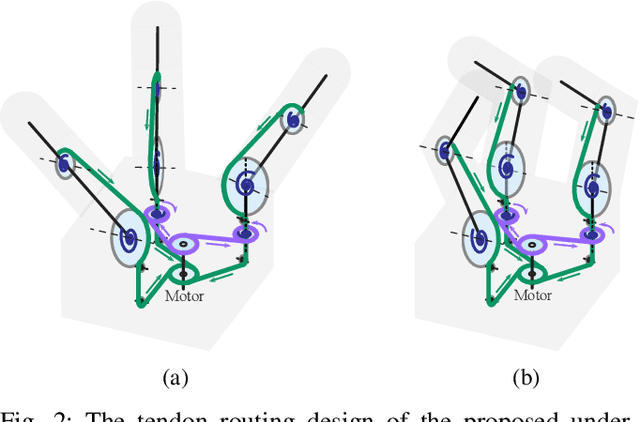
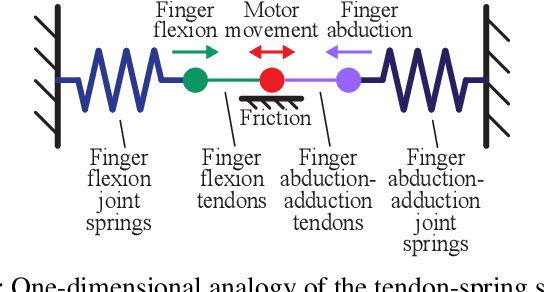
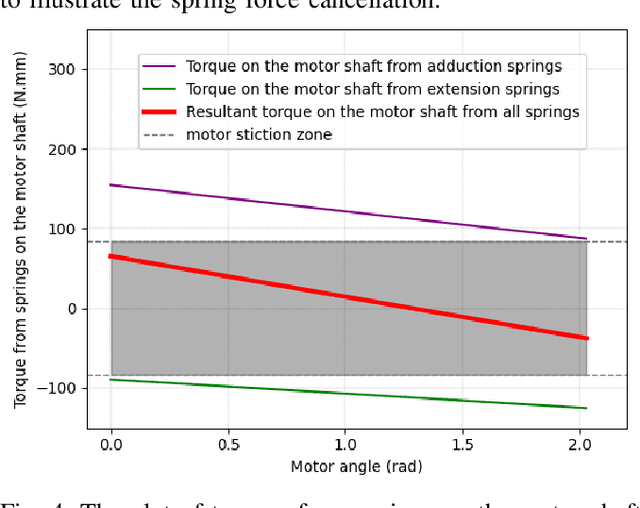
In this paper, we focus on a rarely used paradigm in the design of underactuated robot hands: the use of springs as agonists and tendons as antagonists. We formalize this approach in a design matrix also considering its interplay with the underactuation method used (one tendon for multiple joints vs. multiple tendons on one motor shaft). We then show how different cells in this design matrix can be combined in order to facilitate the implementation of desired postural synergies with a single motor. Furthermore, we show that when agonist and antagonist tendons are combined on the same motor shaft, the resulting spring force cancellation can be leveraged to produce multiple desirable behaviors, which we demonstrate in a physical prototype.
* Submitted to International Conference on Robotics and Automation
(ICRA) 2021
View paper on