 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimple Guidance Mechanisms for Discrete Diffusion Models
Dec 13, 2024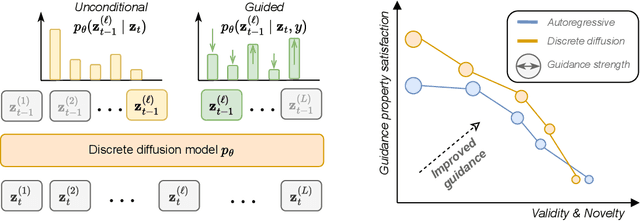
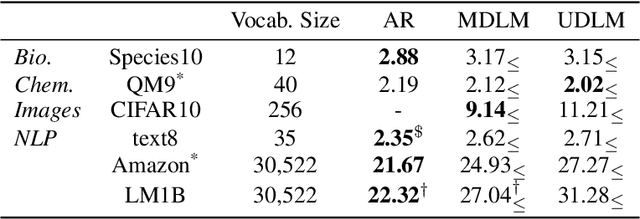

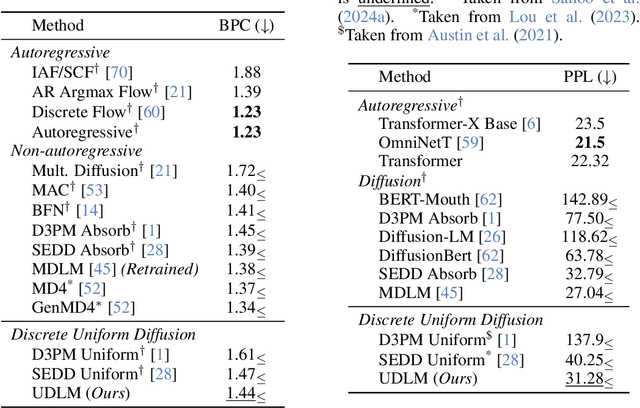
Diffusion models for continuous data gained widespread adoption owing to their high quality generation and control mechanisms. However, controllable diffusion on discrete data faces challenges given that continuous guidance methods do not directly apply to discrete diffusion. Here, we provide a straightforward derivation of classifier-free and classifier-based guidance for discrete diffusion, as well as a new class of diffusion models that leverage uniform noise and that are more guidable because they can continuously edit their outputs. We improve the quality of these models with a novel continuous-time variational lower bound that yields state-of-the-art performance, especially in settings involving guidance or fast generation. Empirically, we demonstrate that our guidance mechanisms combined with uniform noise diffusion improve controllable generation relative to autoregressive and diffusion baselines on several discrete data domains, including genomic sequences, small molecule design, and discretized image generation.
Preference-Conditioned Gradient Variations for Multi-Objective Quality-Diversity
Nov 19, 2024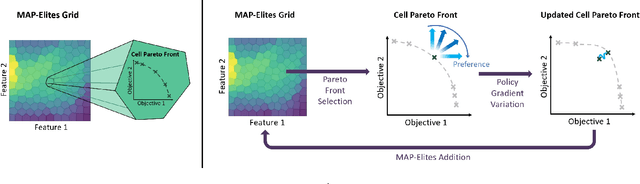
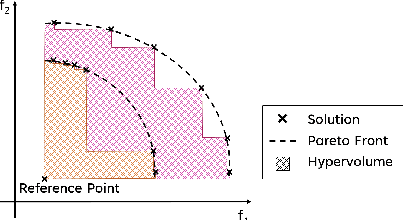
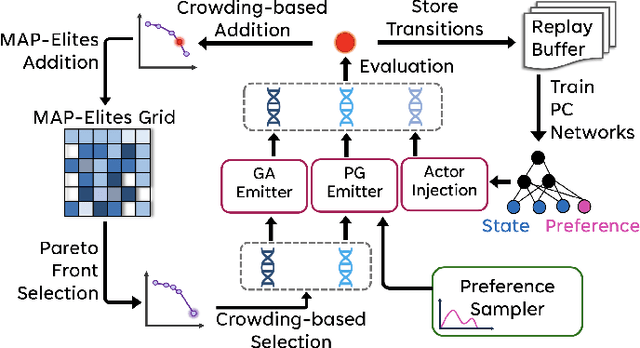
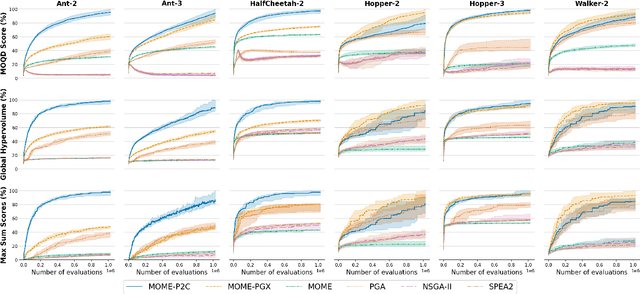
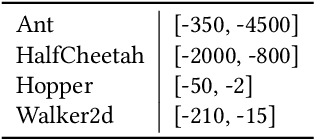
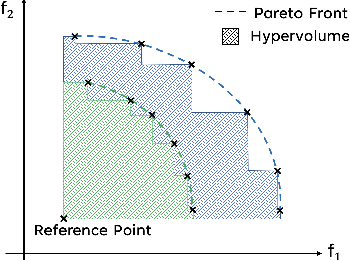
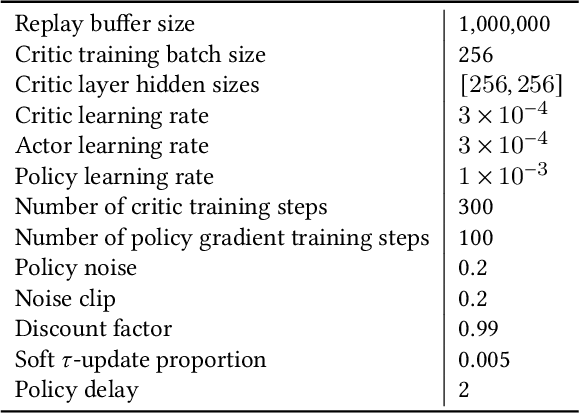
In a variety of domains, from robotics to finance, Quality-Diversity algorithms have been used to generate collections of both diverse and high-performing solutions. Multi-Objective Quality-Diversity algorithms have emerged as a promising approach for applying these methods to complex, multi-objective problems. However, existing methods are limited by their search capabilities. For example, Multi-Objective Map-Elites depends on random genetic variations which struggle in high-dimensional search spaces. Despite efforts to enhance search efficiency with gradient-based mutation operators, existing approaches consider updating solutions to improve on each objective separately rather than achieving desired trade-offs. In this work, we address this limitation by introducing Multi-Objective Map-Elites with Preference-Conditioned Policy-Gradient and Crowding Mechanisms: a new Multi-Objective Quality-Diversity algorithm that uses preference-conditioned policy-gradient mutations to efficiently discover promising regions of the objective space and crowding mechanisms to promote a uniform distribution of solutions on the Pareto front. We evaluate our approach on six robotics locomotion tasks and show that our method outperforms or matches all state-of-the-art Multi-Objective Quality-Diversity methods in all six, including two newly proposed tri-objective tasks. Importantly, our method also achieves a smoother set of trade-offs, as measured by newly-proposed sparsity-based metrics. This performance comes at a lower computational storage cost compared to previous methods.
Multi-modal Transfer Learning between Biological Foundation Models
Jun 20, 2024



Biological sequences encode fundamental instructions for the building blocks of life, in the form of DNA, RNA, and proteins. Modeling these sequences is key to understand disease mechanisms and is an active research area in computational biology. Recently, Large Language Models have shown great promise in solving certain biological tasks but current approaches are limited to a single sequence modality (DNA, RNA, or protein). Key problems in genomics intrinsically involve multiple modalities, but it remains unclear how to adapt general-purpose sequence models to those cases. In this work we propose a multi-modal model that connects DNA, RNA, and proteins by leveraging information from different pre-trained modality-specific encoders. We demonstrate its capabilities by applying it to the largely unsolved problem of predicting how multiple RNA transcript isoforms originate from the same gene (i.e. same DNA sequence) and map to different transcription expression levels across various human tissues. We show that our model, dubbed IsoFormer, is able to accurately predict differential transcript expression, outperforming existing methods and leveraging the use of multiple modalities. Our framework also achieves efficient transfer knowledge from the encoders pre-training as well as in between modalities. We open-source our model, paving the way for new multi-modal gene expression approaches.
Learning the Language of Protein Structure
May 24, 2024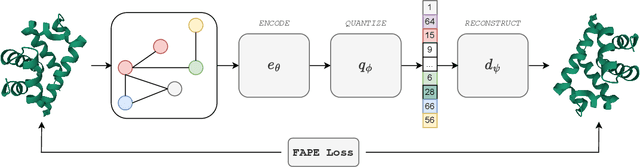
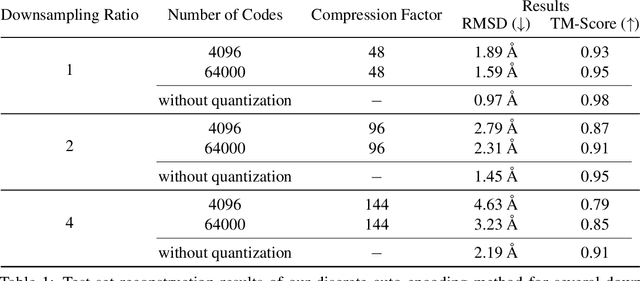
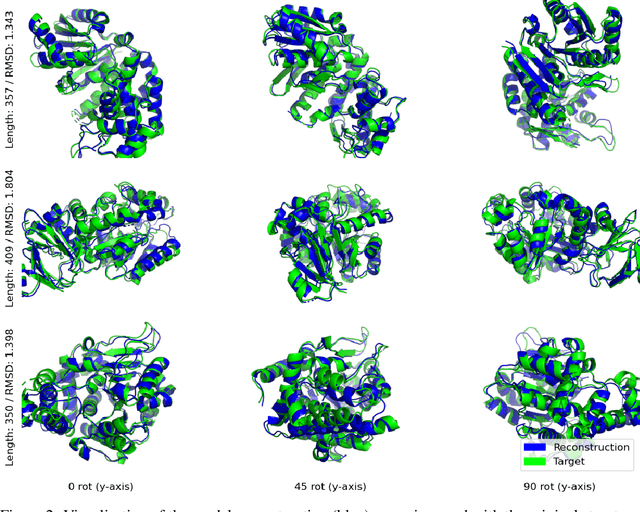
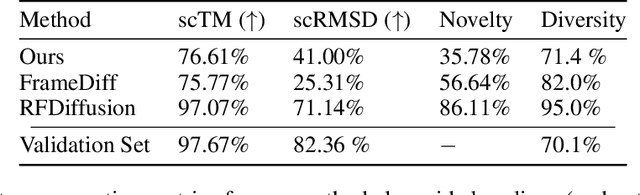
Representation learning and \emph{de novo} generation of proteins are pivotal computational biology tasks. Whilst natural language processing (NLP) techniques have proven highly effective for protein sequence modelling, structure modelling presents a complex challenge, primarily due to its continuous and three-dimensional nature. Motivated by this discrepancy, we introduce an approach using a vector-quantized autoencoder that effectively tokenizes protein structures into discrete representations. This method transforms the continuous, complex space of protein structures into a manageable, discrete format with a codebook ranging from 4096 to 64000 tokens, achieving high-fidelity reconstructions with backbone root mean square deviations (RMSD) of approximately 1-5 \AA. To demonstrate the efficacy of our learned representations, we show that a simple GPT model trained on our codebooks can generate novel, diverse, and designable protein structures. Our approach not only provides representations of protein structure, but also mitigates the challenges of disparate modal representations and sets a foundation for seamless, multi-modal integration, enhancing the capabilities of computational methods in protein design.
Multi-Objective Quality-Diversity for Crystal Structure Prediction
Mar 25, 2024Crystal structures are indispensable across various domains, from batteries to solar cells, and extensive research has been dedicated to predicting their properties based on their atomic configurations. However, prevailing Crystal Structure Prediction methods focus on identifying the most stable solutions that lie at the global minimum of the energy function. This approach overlooks other potentially interesting materials that lie in neighbouring local minima and have different material properties such as conductivity or resistance to deformation. By contrast, Quality-Diversity algorithms provide a promising avenue for Crystal Structure Prediction as they aim to find a collection of high-performing solutions that have diverse characteristics. However, it may also be valuable to optimise for the stability of crystal structures alongside other objectives such as magnetism or thermoelectric efficiency. Therefore, in this work, we harness the power of Multi-Objective Quality-Diversity algorithms in order to find crystal structures which have diverse features and achieve different trade-offs of objectives. We analyse our approach on 5 crystal systems and demonstrate that it is not only able to re-discover known real-life structures, but also find promising new ones. Moreover, we propose a method for illuminating the objective space to gain an understanding of what trade-offs can be achieved.
QDax: A Library for Quality-Diversity and Population-based Algorithms with Hardware Acceleration
Aug 07, 2023QDax is an open-source library with a streamlined and modular API for Quality-Diversity (QD) optimization algorithms in Jax. The library serves as a versatile tool for optimization purposes, ranging from black-box optimization to continuous control. QDax offers implementations of popular QD, Neuroevolution, and Reinforcement Learning (RL) algorithms, supported by various examples. All the implementations can be just-in-time compiled with Jax, facilitating efficient execution across multiple accelerators, including GPUs and TPUs. These implementations effectively demonstrate the framework's flexibility and user-friendliness, easing experimentation for research purposes. Furthermore, the library is thoroughly documented and tested with 95\% coverage.
PASTA: Pretrained Action-State Transformer Agents
Jul 20, 2023



Self-supervised learning has brought about a revolutionary paradigm shift in various computing domains, including NLP, vision, and biology. Recent approaches involve pre-training transformer models on vast amounts of unlabeled data, serving as a starting point for efficiently solving downstream tasks. In the realm of reinforcement learning, researchers have recently adapted these approaches by developing models pre-trained on expert trajectories, enabling them to address a wide range of tasks, from robotics to recommendation systems. However, existing methods mostly rely on intricate pre-training objectives tailored to specific downstream applications. This paper presents a comprehensive investigation of models we refer to as Pretrained Action-State Transformer Agents (PASTA). Our study uses a unified methodology and covers an extensive set of general downstream tasks including behavioral cloning, offline RL, sensor failure robustness, and dynamics change adaptation. Our goal is to systematically compare various design choices and provide valuable insights to practitioners for building robust models. Key highlights of our study include tokenization at the action and state component level, using fundamental pre-training objectives like next token prediction, training models across diverse domains simultaneously, and using parameter efficient fine-tuning (PEFT). The developed models in our study contain fewer than 10 million parameters and the application of PEFT enables fine-tuning of fewer than 10,000 parameters during downstream adaptation, allowing a broad community to use these models and reproduce our experiments. We hope that this study will encourage further research into the use of transformers with first-principles design choices to represent RL trajectories and contribute to robust policy learning.
Gradient-Informed Quality Diversity for the Illumination of Discrete Spaces
Jun 08, 2023Quality Diversity (QD) algorithms have been proposed to search for a large collection of both diverse and high-performing solutions instead of a single set of local optima. While early QD algorithms view the objective and descriptor functions as black-box functions, novel tools have been introduced to use gradient information to accelerate the search and improve overall performance of those algorithms over continuous input spaces. However a broad range of applications involve discrete spaces, such as drug discovery or image generation. Exploring those spaces is challenging as they are combinatorially large and gradients cannot be used in the same manner as in continuous spaces. We introduce map-elites with a Gradient-Informed Discrete Emitter (ME-GIDE), which extends QD optimisation with differentiable functions over discrete search spaces. ME-GIDE leverages the gradient information of the objective and descriptor functions with respect to its discrete inputs to propose gradient-informed updates that guide the search towards a diverse set of high quality solutions. We evaluate our method on challenging benchmarks including protein design and discrete latent space illumination and find that our method outperforms state-of-the-art QD algorithms in all benchmarks.
The Quality-Diversity Transformer: Generating Behavior-Conditioned Trajectories with Decision Transformers
Mar 27, 2023In the context of neuroevolution, Quality-Diversity algorithms have proven effective in generating repertoires of diverse and efficient policies by relying on the definition of a behavior space. A natural goal induced by the creation of such a repertoire is trying to achieve behaviors on demand, which can be done by running the corresponding policy from the repertoire. However, in uncertain environments, two problems arise. First, policies can lack robustness and repeatability, meaning that multiple episodes under slightly different conditions often result in very different behaviors. Second, due to the discrete nature of the repertoire, solutions vary discontinuously. Here we present a new approach to achieve behavior-conditioned trajectory generation based on two mechanisms: First, MAP-Elites Low-Spread (ME-LS), which constrains the selection of solutions to those that are the most consistent in the behavior space. Second, the Quality-Diversity Transformer (QDT), a Transformer-based model conditioned on continuous behavior descriptors, which trains on a dataset generated by policies from a ME-LS repertoire and learns to autoregressively generate sequences of actions that achieve target behaviors. Results show that ME-LS produces consistent and robust policies, and that its combination with the QDT yields a single policy capable of achieving diverse behaviors on demand with high accuracy.
Improving the Data Efficiency of Multi-Objective Quality-Diversity through Gradient Assistance and Crowding Exploration
Feb 24, 2023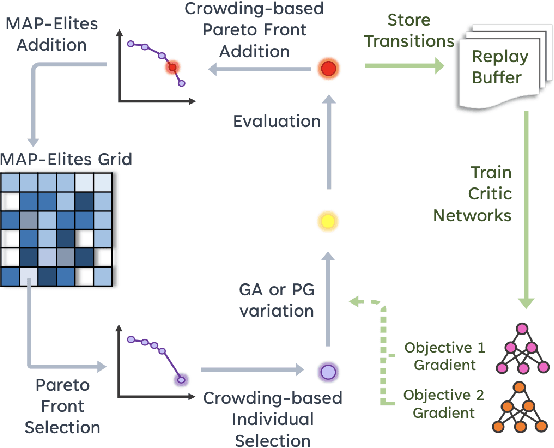
Quality-Diversity (QD) algorithms have recently gained traction as optimisation methods due to their effectiveness at escaping local optima and capability of generating wide-ranging and high-performing solutions. Recently, Multi-Objective MAP-Elites (MOME) extended the QD paradigm to the multi-objective setting by maintaining a Pareto front in each cell of a map-elites grid. MOME achieved a global performance that competed with NSGA-II and SPEA2, two well-established Multi-Objective Evolutionary Algorithms (MOEA), while also acquiring a diverse repertoire of solutions. However, MOME is limited by non-directed genetic search mechanisms which struggle in high-dimensional search spaces. In this work, we present Multi-Objective MAP-Elites with Policy-Gradient Assistance and Crowding-based Exploration (MOME-PGX): a new QD algorithm that extends MOME to improve its data efficiency and performance. MOME-PGX uses gradient-based optimisation to efficiently drive solutions towards higher performance. It also introduces crowding-based mechanisms to create an improved exploration strategy and to encourage uniformity across Pareto fronts. We evaluate MOME-PGX in four simulated robot locomotion tasks and demonstrate that it converges faster and to a higher performance than all other baselines. We show that MOME-PGX is between 4.3 and 42 times more data-efficient than MOME and doubles the performance of MOME, NSGA-II and SPEA2 in challenging environments.