 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAffectSeek: Agentic Affective Understanding in Long Videos under Vague User Queries
May 07, 2026Existing affective understanding studies have mainly focused on recognizing emotions from images, audio signals, or pre-cliped video clips, where the affective evidence is already given. This passive and clip-centered setting does not fully reflect real-world scenarios, in which users often interact with long videos and express their needs through natural-language queries. In this paper, we study \textbf{Vague-Query-driven video Affective Understanding (VQAU)}, a new task that requires models to localize affective moments in long videos, predict their emotion categories, and generate evidence-grounded rationales under vague user queries. To support this task, we construct \textbf{VQAU-Bench}, a benchmark that integrates long videos, vague affective queries, temporal clip annotations, emotion labels, and rationale explanations into a unified evaluation framework. VQAU-Bench enables systematic assessment of semantic-temporal-affective alignment, affective moment localization, emotion classification, and rationale generation. To address the multi-step reasoning challenges of VQAU, we further propose \textbf{AffectSeek}, an agentic framework that actively seeks, verifies, and explains affective moments in long videos. AffectSeek decomposes VQAU into intent interpretation, candidate localization, clip verification, emotion reasoning, and rationale generation, and progressively aligns vague user intent with long-video evidence through role-specialized reasoning and cross-stage verification. Experiments show that VQAU remains challenging for existing affective recognition models and single-step vision-language models, while AffectSeek provides a simple yet effective framework for agentic long-video affective understanding.
ZOTTA: Test-Time Adaptation with Gradient-Free Zeroth-Order Optimization
Mar 15, 2026Test-time adaptation (TTA) aims to improve model robustness under distribution shifts by adapting to unlabeled test data, but most existing methods rely on backpropagation (BP), which is computationally costly and incompatible with non-differentiable models such as quantized models, limiting practical deployment on numerous edge devices. Recent BP-free approaches alleviate overhead but remain either architecture-specific or limited in optimization capacity to handle high-dimensional models. We propose ZOTTA, a fully BP-free TTA framework that performs efficient adaptation using only forward passes via Zeroth-Order Optimization (ZOO). While ZOO is theoretically appealing, naive application leads to slow convergence under high-dimensional parameter spaces and unstable optimization due to the lack of labels. ZOTTA overcomes these challenges through 1) Distribution-Robust Layer Selection, which automatically identifies and freezes layers that already extract distribution-invariant features, updating only domain-sensitive layers to reduce the optimization dimensionality and accelerate convergence; 2) Spatial Feature Aggregation Alignment, which stabilizes ZOO by aligning globally aggregated spatial features between source and target to reduce gradient variance. Together, these components enable architecture-agnostic and stable BP-free adaptation. Extensive experiments on ImageNet-C/R/Sketch/A show that ZOTTA outperforms or matches BP-based methods, e.g., it reduces memory usage by 84% and improves accuracy by 3.9% over SAR on ImageNet-C.
Sparse Shortcuts: Facilitating Efficient Fusion in Multimodal Large Language Models
Jan 31, 2026With the remarkable success of large language models (LLMs) in natural language understanding and generation, multimodal large language models (MLLMs) have rapidly advanced in their ability to process data across multiple modalities. While most existing efforts focus on scaling up language models or constructing higher-quality training data, limited attention has been paid to effectively integrating cross-modal knowledge into the language space. In vision-language models, for instance, aligning modalities using only high-level visual features often discards the rich semantic information present in mid- and low-level features, limiting the model's ability of cross-modality understanding. To address this issue, we propose SparseCut, a general cross-modal fusion architecture for MLLMs, introducing sparse shortcut connections between the cross-modal encoder and the LLM. These shortcut connections enable the efficient and hierarchical integration of visual features at multiple levels, facilitating richer semantic fusion without increasing computational overhead. We further introduce an efficient multi-grained feature fusion module, which performs the fusion of visual features before routing them through the shortcuts. This preserves the original language context and does not increase the overall input length, thereby avoiding an increase in computational complexity for the LLM. Experiments demonstrate that SparseCut significantly enhances the performance of MLLMs across various multimodal benchmarks with generality and scalability for different base LLMs.
Opening the Black Box: Preliminary Insights into Affective Modeling in Multimodal Foundation Models
Jan 22, 2026Understanding where and how emotions are represented in large-scale foundation models remains an open problem, particularly in multimodal affective settings. Despite the strong empirical performance of recent affective models, the internal architectural mechanisms that support affective understanding and generation are still poorly understood. In this work, we present a systematic mechanistic study of affective modeling in multimodal foundation models. Across multiple architectures, training strategies, and affective tasks, we analyze how emotion-oriented supervision reshapes internal model parameters. Our results consistently reveal a clear and robust pattern: affective adaptation does not primarily focus on the attention module, but instead localizes to the feed-forward gating projection (\texttt{gate\_proj}). Through controlled module transfer, targeted single-module adaptation, and destructive ablation, we further demonstrate that \texttt{gate\_proj} is sufficient, efficient, and necessary for affective understanding and generation. Notably, by tuning only approximately 24.5\% of the parameters tuned by AffectGPT, our approach achieves 96.6\% of its average performance across eight affective tasks, highlighting substantial parameter efficiency. Together, these findings provide empirical evidence that affective capabilities in foundation models are structurally mediated by feed-forward gating mechanisms and identify \texttt{gate\_proj} as a central architectural locus of affective modeling.
Revisiting Cross-Architecture Distillation: Adaptive Dual-Teacher Transfer for Lightweight Video Models
Nov 12, 2025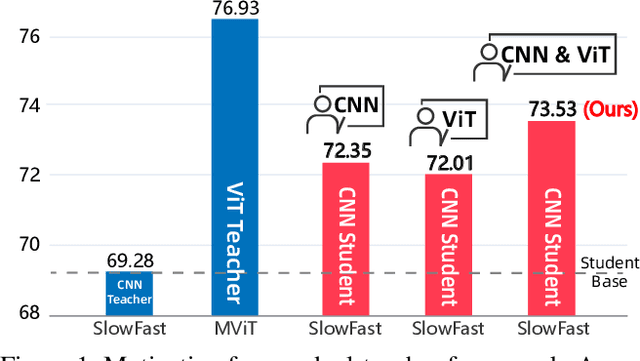

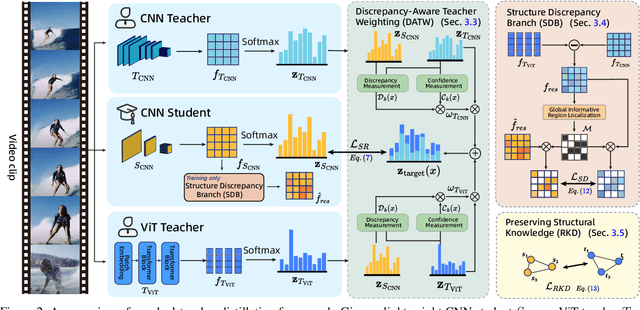

Vision Transformers (ViTs) have achieved strong performance in video action recognition, but their high computational cost limits their practicality. Lightweight CNNs are more efficient but suffer from accuracy gaps. Cross-Architecture Knowledge Distillation (CAKD) addresses this by transferring knowledge from ViTs to CNNs, yet existing methods often struggle with architectural mismatch and overlook the value of stronger homogeneous CNN teachers. To tackle these challenges, we propose a Dual-Teacher Knowledge Distillation framework that leverages both a heterogeneous ViT teacher and a homogeneous CNN teacher to collaboratively guide a lightweight CNN student. We introduce two key components: (1) Discrepancy-Aware Teacher Weighting, which dynamically fuses the predictions from ViT and CNN teachers by assigning adaptive weights based on teacher confidence and prediction discrepancy with the student, enabling more informative and effective supervision; and (2) a Structure Discrepancy-Aware Distillation strategy, where the student learns the residual features between ViT and CNN teachers via a lightweight auxiliary branch, focusing on transferable architectural differences without mimicking all of ViT's high-dimensional patterns. Extensive experiments on benchmarks including HMDB51, EPIC-KITCHENS-100, and Kinetics-400 demonstrate that our method consistently outperforms state-of-the-art distillation approaches, achieving notable performance improvements with a maximum accuracy gain of 5.95% on HMDB51.
Whole-Body Coordination for Dynamic Object Grasping with Legged Manipulators
Aug 10, 2025Quadrupedal robots with manipulators offer strong mobility and adaptability for grasping in unstructured, dynamic environments through coordinated whole-body control. However, existing research has predominantly focused on static-object grasping, neglecting the challenges posed by dynamic targets and thus limiting applicability in dynamic scenarios such as logistics sorting and human-robot collaboration. To address this, we introduce DQ-Bench, a new benchmark that systematically evaluates dynamic grasping across varying object motions, velocities, heights, object types, and terrain complexities, along with comprehensive evaluation metrics. Building upon this benchmark, we propose DQ-Net, a compact teacher-student framework designed to infer grasp configurations from limited perceptual cues. During training, the teacher network leverages privileged information to holistically model both the static geometric properties and dynamic motion characteristics of the target, and integrates a grasp fusion module to deliver robust guidance for motion planning. Concurrently, we design a lightweight student network that performs dual-viewpoint temporal modeling using only the target mask, depth map, and proprioceptive state, enabling closed-loop action outputs without reliance on privileged data. Extensive experiments on DQ-Bench demonstrate that DQ-Net achieves robust dynamic objects grasping across multiple task settings, substantially outperforming baseline methods in both success rate and responsiveness.
Emotion Recognition from Skeleton Data: A Comprehensive Survey
Jul 24, 2025Emotion recognition through body movements has emerged as a compelling and privacy-preserving alternative to traditional methods that rely on facial expressions or physiological signals. Recent advancements in 3D skeleton acquisition technologies and pose estimation algorithms have significantly enhanced the feasibility of emotion recognition based on full-body motion. This survey provides a comprehensive and systematic review of skeleton-based emotion recognition techniques. First, we introduce psychological models of emotion and examine the relationship between bodily movements and emotional expression. Next, we summarize publicly available datasets, highlighting the differences in data acquisition methods and emotion labeling strategies. We then categorize existing methods into posture-based and gait-based approaches, analyzing them from both data-driven and technical perspectives. In particular, we propose a unified taxonomy that encompasses four primary technical paradigms: Traditional approaches, Feat2Net, FeatFusionNet, and End2EndNet. Representative works within each category are reviewed and compared, with benchmarking results across commonly used datasets. Finally, we explore the extended applications of emotion recognition in mental health assessment, such as detecting depression and autism, and discuss the open challenges and future research directions in this rapidly evolving field.
Exploring Audio Cues for Enhanced Test-Time Video Model Adaptation
Jun 14, 2025Test-time adaptation (TTA) aims to boost the generalization capability of a trained model by conducting self-/unsupervised learning during the testing phase. While most existing TTA methods for video primarily utilize visual supervisory signals, they often overlook the potential contribution of inherent audio data. To address this gap, we propose a novel approach that incorporates audio information into video TTA. Our method capitalizes on the rich semantic content of audio to generate audio-assisted pseudo-labels, a new concept in the context of video TTA. Specifically, we propose an audio-to-video label mapping method by first employing pre-trained audio models to classify audio signals extracted from videos and then mapping the audio-based predictions to video label spaces through large language models, thereby establishing a connection between the audio categories and video labels. To effectively leverage the generated pseudo-labels, we present a flexible adaptation cycle that determines the optimal number of adaptation iterations for each sample, based on changes in loss and consistency across different views. This enables a customized adaptation process for each sample. Experimental results on two widely used datasets (UCF101-C and Kinetics-Sounds-C), as well as on two newly constructed audio-video TTA datasets (AVE-C and AVMIT-C) with various corruption types, demonstrate the superiority of our approach. Our method consistently improves adaptation performance across different video classification models and represents a significant step forward in integrating audio information into video TTA. Code: https://github.com/keikeiqi/Audio-Assisted-TTA.
Learning to Generate Gradients for Test-Time Adaptation via Test-Time Training Layers
Dec 22, 2024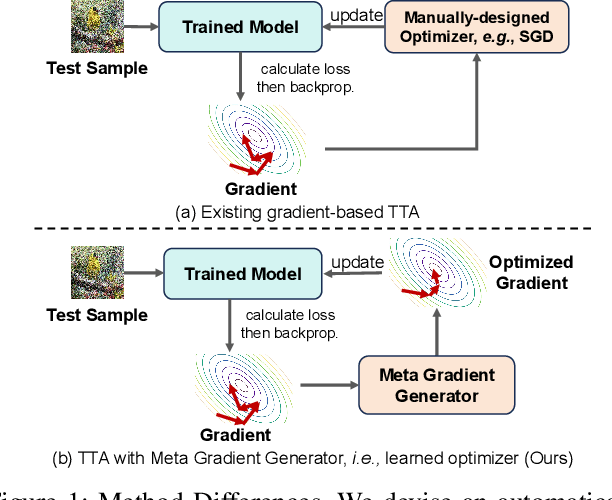
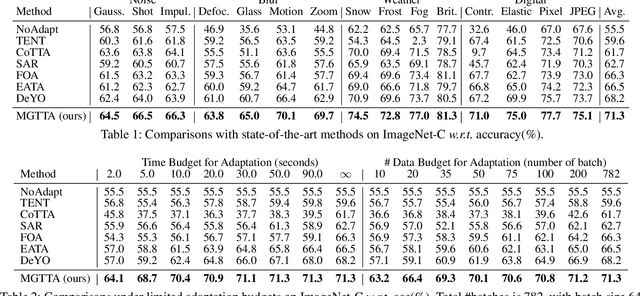
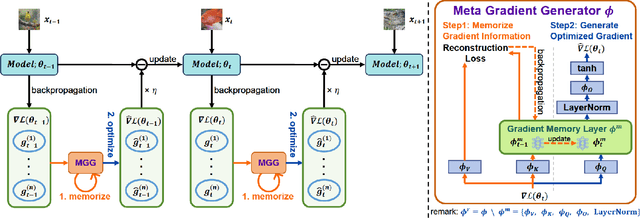
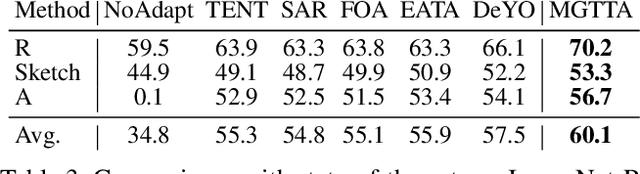
Test-time adaptation (TTA) aims to fine-tune a trained model online using unlabeled testing data to adapt to new environments or out-of-distribution data, demonstrating broad application potential in real-world scenarios. However, in this optimization process, unsupervised learning objectives like entropy minimization frequently encounter noisy learning signals. These signals produce unreliable gradients, which hinder the model ability to converge to an optimal solution quickly and introduce significant instability into the optimization process. In this paper, we seek to resolve these issues from the perspective of optimizer design. Unlike prior TTA using manually designed optimizers like SGD, we employ a learning-to-optimize approach to automatically learn an optimizer, called Meta Gradient Generator (MGG). Specifically, we aim for MGG to effectively utilize historical gradient information during the online optimization process to optimize the current model. To this end, in MGG, we design a lightweight and efficient sequence modeling layer -- gradient memory layer. It exploits a self-supervised reconstruction loss to compress historical gradient information into network parameters, thereby enabling better memorization ability over a long-term adaptation process. We only need a small number of unlabeled samples to pre-train MGG, and then the trained MGG can be deployed to process unseen samples. Promising results on ImageNet-C, R, Sketch, and A indicate that our method surpasses current state-of-the-art methods with fewer updates, less data, and significantly shorter adaptation iterations. Compared with a previous SOTA method SAR, we achieve 7.4% accuracy improvement and 4.2 times faster adaptation speed on ImageNet-C.
* 3 figures, 11 tables
Efficient Language-instructed Skill Acquisition via Reward-Policy Co-Evolution
Dec 18, 2024



The ability to autonomously explore and resolve tasks with minimal human guidance is crucial for the self-development of embodied intelligence. Although reinforcement learning methods can largely ease human effort, it's challenging to design reward functions for real-world tasks, especially for high-dimensional robotic control, due to complex relationships among joints and tasks. Recent advancements large language models (LLMs) enable automatic reward function design. However, approaches evaluate reward functions by re-training policies from scratch placing an undue burden on the reward function, expecting it to be effective throughout the whole policy improvement process. We argue for a more practical strategy in robotic autonomy, focusing on refining existing policies with policy-dependent reward functions rather than a universal one. To this end, we propose a novel reward-policy co-evolution framework where the reward function and the learned policy benefit from each other's progressive on-the-fly improvements, resulting in more efficient and higher-performing skill acquisition. Specifically, the reward evolution process translates the robot's previous best reward function, descriptions of tasks and environment into text inputs. These inputs are used to query LLMs to generate a dynamic amount of reward function candidates, ensuring continuous improvement at each round of evolution. For policy evolution, our method generates new policy populations by hybridizing historically optimal and random policies. Through an improved Bayesian optimization, our approach efficiently and robustly identifies the most capable and plastic reward-policy combination, which then proceeds to the next round of co-evolution. Despite using less data, our approach demonstrates an average normalized improvement of 95.3% across various high-dimensional robotic skill learning tasks.