 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGreenback Bears and Fiscal Hawks: Finance is a Jungle and Text Embeddings Must Adapt
Nov 11, 2024Financial documents are filled with specialized terminology, arcane jargon, and curious acronyms that pose challenges for general-purpose text embeddings. Yet, few text embeddings specialized for finance have been reported in the literature, perhaps in part due to a lack of public datasets and benchmarks. We present BAM embeddings, a set of text embeddings finetuned on a carefully constructed dataset of 14.3M query-passage pairs. Demonstrating the benefits of domain-specific training, BAM embeddings achieve Recall@1 of 62.8% on a held-out test set, vs. only 39.2% for the best general-purpose text embedding from OpenAI. Further, BAM embeddings increase question answering accuracy by 8% on FinanceBench and show increased sensitivity to the finance-specific elements that are found in detailed, forward-looking and company and date-specific queries. To support further research we describe our approach in detail, quantify the importance of hard negative mining and dataset scale.
Prompt Expansion for Adaptive Text-to-Image Generation
Dec 27, 2023
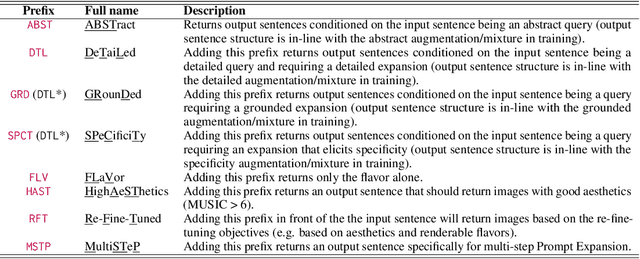
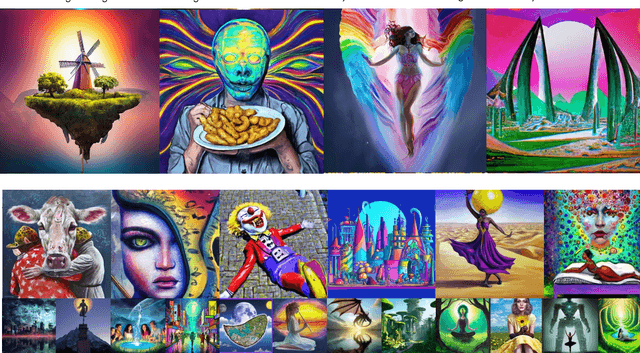
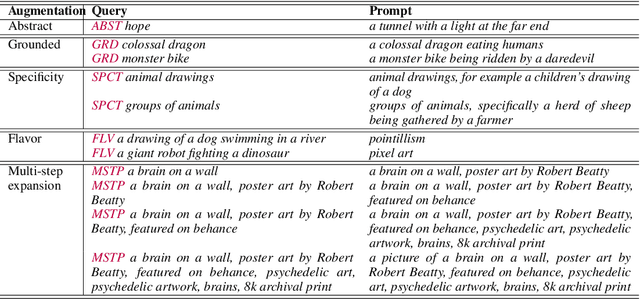
Text-to-image generation models are powerful but difficult to use. Users craft specific prompts to get better images, though the images can be repetitive. This paper proposes a Prompt Expansion framework that helps users generate high-quality, diverse images with less effort. The Prompt Expansion model takes a text query as input and outputs a set of expanded text prompts that are optimized such that when passed to a text-to-image model, generates a wider variety of appealing images. We conduct a human evaluation study that shows that images generated through Prompt Expansion are more aesthetically pleasing and diverse than those generated by baseline methods. Overall, this paper presents a novel and effective approach to improving the text-to-image generation experience.
Davidsonian Scene Graph: Improving Reliability in Fine-grained Evaluation for Text-to-Image Generation
Oct 30, 2023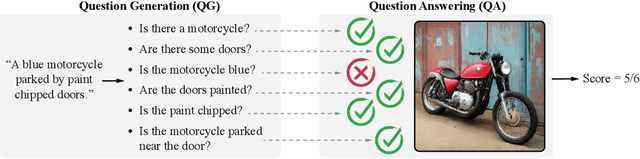
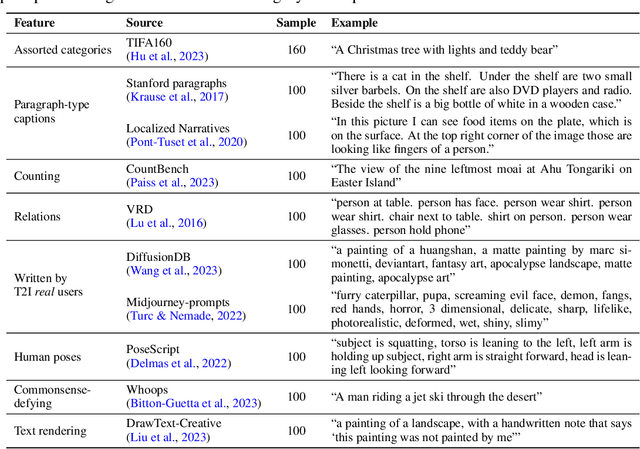
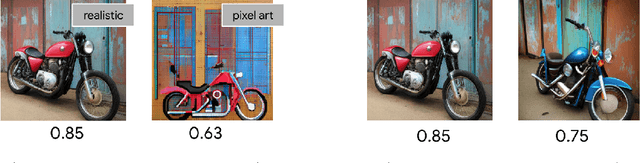
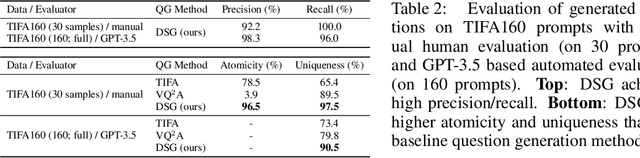
Evaluating text-to-image models is notoriously difficult. A strong recent approach for assessing text-image faithfulness is based on QG/A (question generation and answering), which uses pre-trained foundational models to automatically generate a set of questions and answers from the prompt, and output images are scored based on whether these answers extracted with a visual question answering model are consistent with the prompt-based answers. This kind of evaluation is naturally dependent on the quality of the underlying QG and QA models. We identify and address several reliability challenges in existing QG/A work: (a) QG questions should respect the prompt (avoiding hallucinations, duplications, and omissions) and (b) VQA answers should be consistent (not asserting that there is no motorcycle in an image while also claiming the motorcycle is blue). We address these issues with Davidsonian Scene Graph (DSG), an empirically grounded evaluation framework inspired by formal semantics. DSG is an automatic, graph-based QG/A that is modularly implemented to be adaptable to any QG/A module. DSG produces atomic and unique questions organized in dependency graphs, which (i) ensure appropriate semantic coverage and (ii) sidestep inconsistent answers. With extensive experimentation and human evaluation on a range of model configurations (LLM, VQA, and T2I), we empirically demonstrate that DSG addresses the challenges noted above. Finally, we present DSG-1k, an open-sourced evaluation benchmark that includes 1,060 prompts, covering a wide range of fine-grained semantic categories with a balanced distribution. We release the DSG-1k prompts and the corresponding DSG questions.
Imagen Editor and EditBench: Advancing and Evaluating Text-Guided Image Inpainting
Dec 13, 2022



Text-guided image editing can have a transformative impact in supporting creative applications. A key challenge is to generate edits that are faithful to input text prompts, while consistent with input images. We present Imagen Editor, a cascaded diffusion model built, by fine-tuning Imagen on text-guided image inpainting. Imagen Editor's edits are faithful to the text prompts, which is accomplished by using object detectors to propose inpainting masks during training. In addition, Imagen Editor captures fine details in the input image by conditioning the cascaded pipeline on the original high resolution image. To improve qualitative and quantitative evaluation, we introduce EditBench, a systematic benchmark for text-guided image inpainting. EditBench evaluates inpainting edits on natural and generated images exploring objects, attributes, and scenes. Through extensive human evaluation on EditBench, we find that object-masking during training leads to across-the-board improvements in text-image alignment -- such that Imagen Editor is preferred over DALL-E 2 and Stable Diffusion -- and, as a cohort, these models are better at object-rendering than text-rendering, and handle material/color/size attributes better than count/shape attributes.
A New Path: Scaling Vision-and-Language Navigation with Synthetic Instructions and Imitation Learning
Oct 06, 2022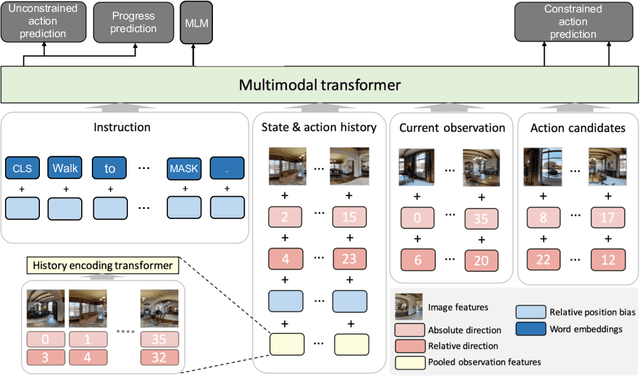
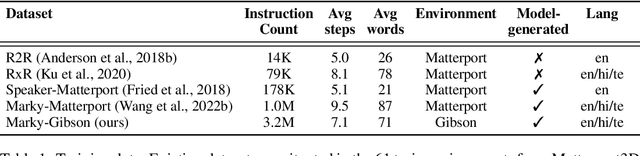
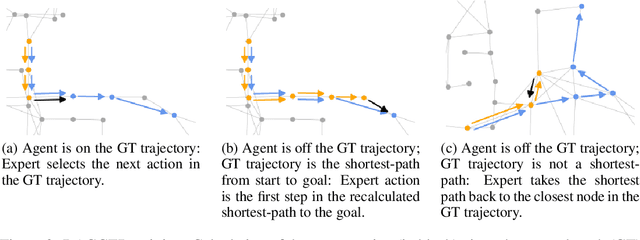
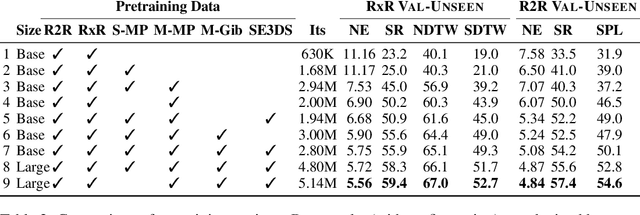
Recent studies in Vision-and-Language Navigation (VLN) train RL agents to execute natural-language navigation instructions in photorealistic environments, as a step towards intelligent agents or robots that can follow human instructions. However, given the scarcity of human instruction data and limited diversity in the training environments, these agents still struggle with complex language grounding and spatial language understanding. Pre-training on large text and image-text datasets from the web has been extensively explored but the improvements are limited. To address the scarcity of in-domain instruction data, we investigate large-scale augmentation with synthetic instructions. We take 500+ indoor environments captured in densely-sampled 360 deg panoramas, construct navigation trajectories through these panoramas, and generate a visually-grounded instruction for each trajectory using Marky (Wang et al., 2022), a high-quality multilingual navigation instruction generator. To further increase the variability of the trajectories, we also synthesize image observations from novel viewpoints using an image-to-image GAN. The resulting dataset of 4.2M instruction-trajectory pairs is two orders of magnitude larger than existing human-annotated datasets, and contains a wider variety of environments and viewpoints. To efficiently leverage data at this scale, we train a transformer agent with imitation learning for over 700M steps of experience. On the challenging Room-across-Room dataset, our approach outperforms all existing RL agents, improving the state-of-the-art NDTW from 71.1 to 79.1 in seen environments, and from 64.6 to 66.8 in unseen test environments. Our work points to a new path to improving instruction-following agents, emphasizing large-scale imitation learning and the development of synthetic instruction generation capabilities.
Iterative Vision-and-Language Navigation
Oct 06, 2022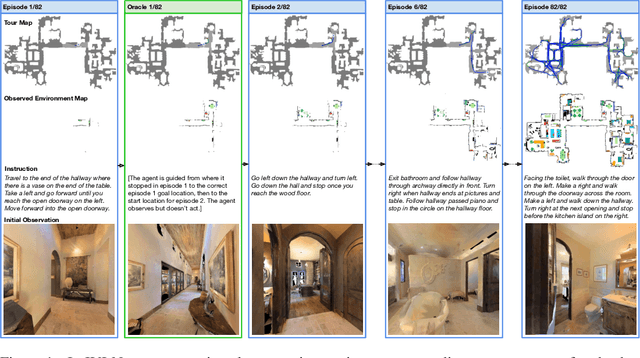
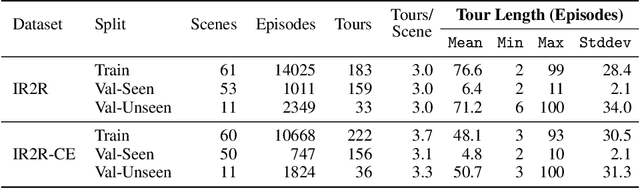
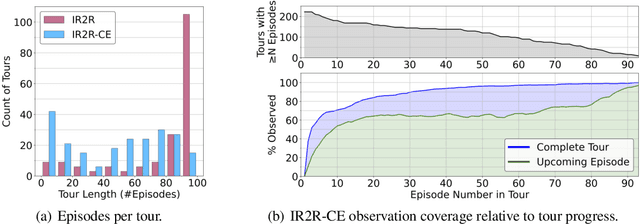

We present Iterative Vision-and-Language Navigation (IVLN), a paradigm for evaluating language-guided agents navigating in a persistent environment over time. Existing Vision-and-Language Navigation (VLN) benchmarks erase the agent's memory at the beginning of every episode, testing the ability to perform cold-start navigation with no prior information. However, deployed robots occupy the same environment for long periods of time. The IVLN paradigm addresses this disparity by training and evaluating VLN agents that maintain memory across tours of scenes that consist of up to 100 ordered instruction-following Room-to-Room (R2R) episodes, each defined by an individual language instruction and a target path. We present discrete and continuous Iterative Room-to-Room (IR2R) benchmarks comprising about 400 tours each in 80 indoor scenes. We find that extending the implicit memory of high-performing transformer VLN agents is not sufficient for IVLN, but agents that build maps can benefit from environment persistence, motivating a renewed focus on map-building agents in VLN.
Simple and Effective Synthesis of Indoor 3D Scenes
Apr 06, 2022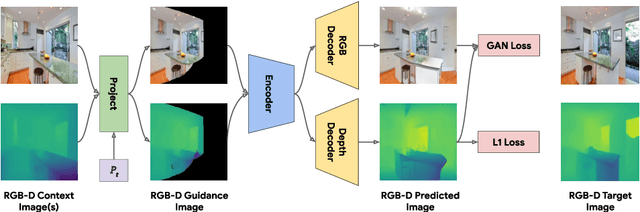
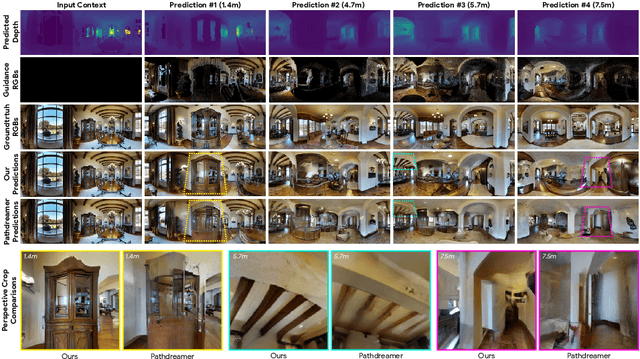
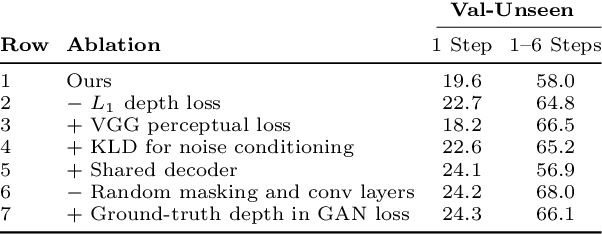
We study the problem of synthesizing immersive 3D indoor scenes from one or more images. Our aim is to generate high-resolution images and videos from novel viewpoints, including viewpoints that extrapolate far beyond the input images while maintaining 3D consistency. Existing approaches are highly complex, with many separately trained stages and components. We propose a simple alternative: an image-to-image GAN that maps directly from reprojections of incomplete point clouds to full high-resolution RGB-D images. On the Matterport3D and RealEstate10K datasets, our approach significantly outperforms prior work when evaluated by humans, as well as on FID scores. Further, we show that our model is useful for generative data augmentation. A vision-and-language navigation (VLN) agent trained with trajectories spatially-perturbed by our model improves success rate by up to 1.5% over a state of the art baseline on the R2R benchmark. Our code will be made available to facilitate generative data augmentation and applications to downstream robotics and embodied AI tasks.
Less is More: Generating Grounded Navigation Instructions from Landmarks
Nov 29, 2021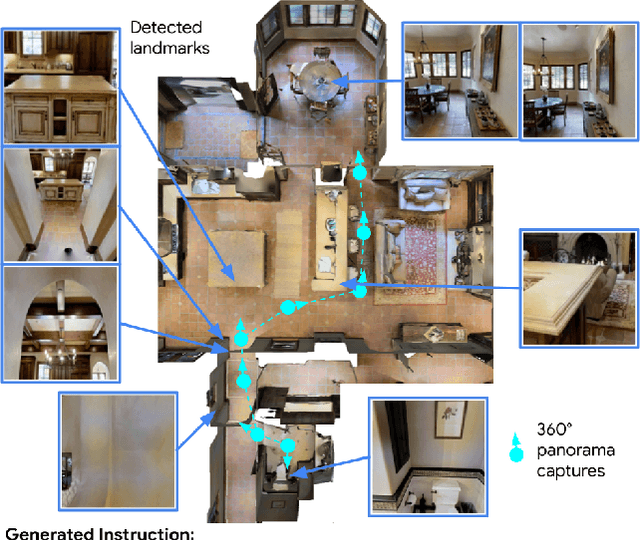
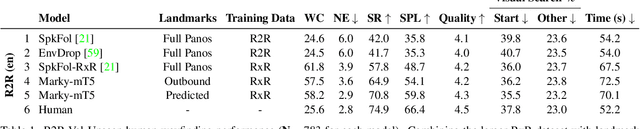

We study the automatic generation of navigation instructions from 360-degree images captured on indoor routes. Existing generators suffer from poor visual grounding, causing them to rely on language priors and hallucinate objects. Our MARKY-MT5 system addresses this by focusing on visual landmarks; it comprises a first stage landmark detector and a second stage generator -- a multimodal, multilingual, multitask encoder-decoder. To train it, we bootstrap grounded landmark annotations on top of the Room-across-Room (RxR) dataset. Using text parsers, weak supervision from RxR's pose traces, and a multilingual image-text encoder trained on 1.8b images, we identify 1.1m English, Hindi and Telugu landmark descriptions and ground them to specific regions in panoramas. On Room-to-Room, human wayfinders obtain success rates (SR) of 71% following MARKY-MT5's instructions, just shy of their 75% SR following human instructions -- and well above SRs with other generators. Evaluations on RxR's longer, diverse paths obtain 61-64% SRs on three languages. Generating such high-quality navigation instructions in novel environments is a step towards conversational navigation tools and could facilitate larger-scale training of instruction-following agents.
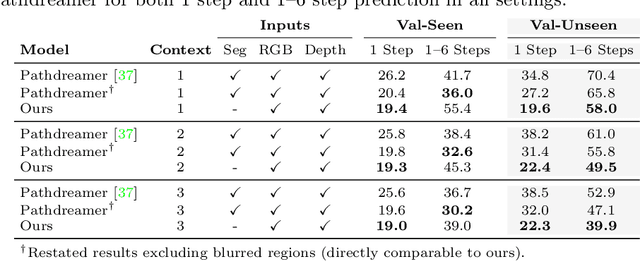
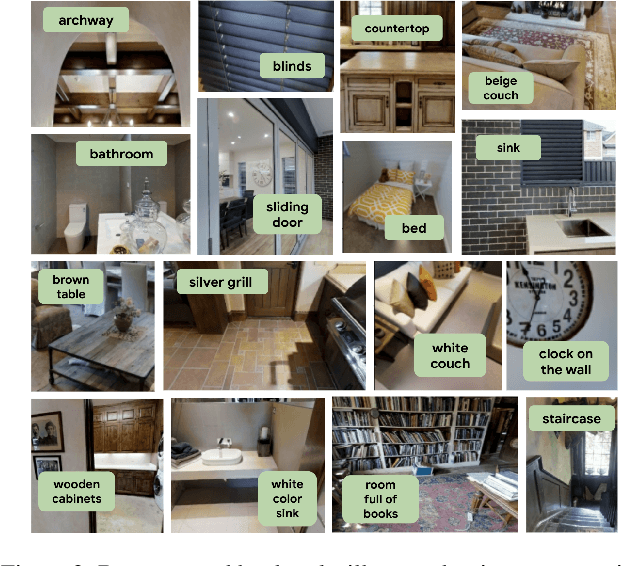
Pathdreamer: A World Model for Indoor Navigation
May 18, 2021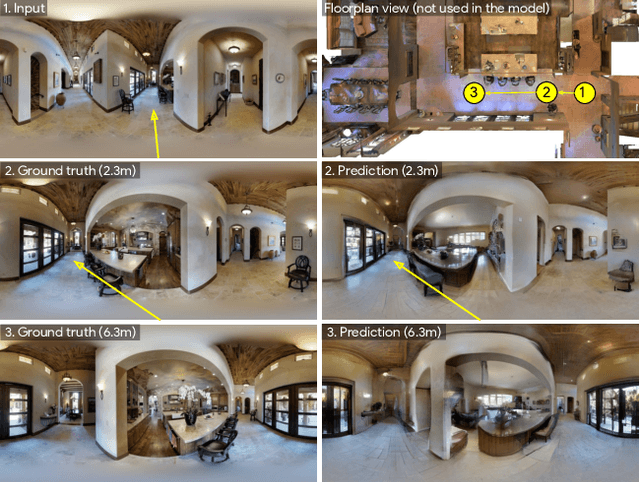
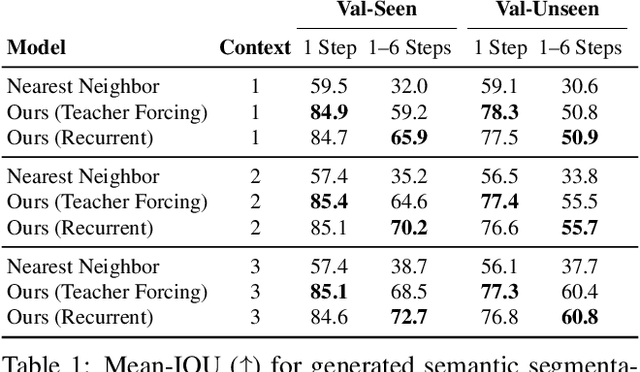
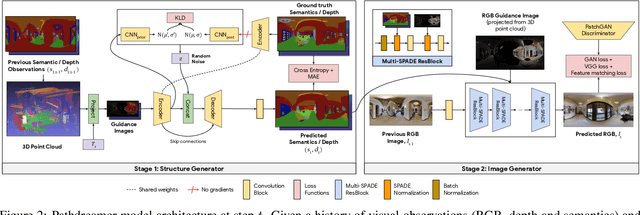
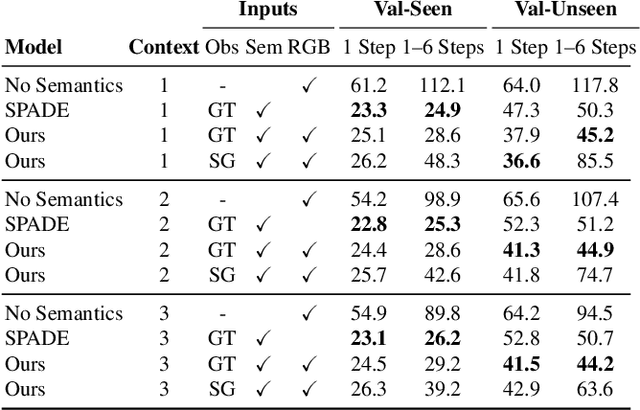
People navigating in unfamiliar buildings take advantage of myriad visual, spatial and semantic cues to efficiently achieve their navigation goals. Towards equipping computational agents with similar capabilities, we introduce Pathdreamer, a visual world model for agents navigating in novel indoor environments. Given one or more previous visual observations, Pathdreamer generates plausible high-resolution 360 visual observations (RGB, semantic segmentation and depth) for viewpoints that have not been visited, in buildings not seen during training. In regions of high uncertainty (e.g. predicting around corners, imagining the contents of an unseen room), Pathdreamer can predict diverse scenes, allowing an agent to sample multiple realistic outcomes for a given trajectory. We demonstrate that Pathdreamer encodes useful and accessible visual, spatial and semantic knowledge about human environments by using it in the downstream task of Vision-and-Language Navigation (VLN). Specifically, we show that planning ahead with Pathdreamer brings about half the benefit of looking ahead at actual observations from unobserved parts of the environment. We hope that Pathdreamer will help unlock model-based approaches to challenging embodied navigation tasks such as navigating to specified objects and VLN.
PanGEA: The Panoramic Graph Environment Annotation Toolkit
Mar 23, 2021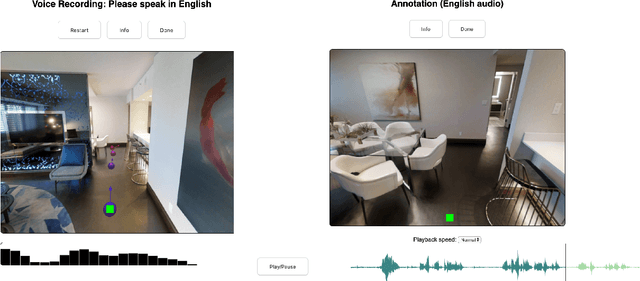
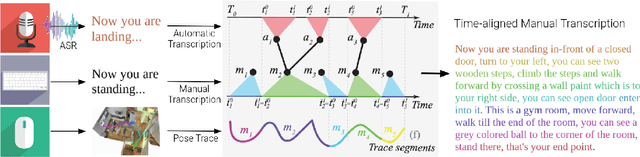
PanGEA, the Panoramic Graph Environment Annotation toolkit, is a lightweight toolkit for collecting speech and text annotations in photo-realistic 3D environments. PanGEA immerses annotators in a web-based simulation and allows them to move around easily as they speak and/or listen. It includes database and cloud storage integration, plus utilities for automatically aligning recorded speech with manual transcriptions and the virtual pose of the annotators. Out of the box, PanGEA supports two tasks -- collecting navigation instructions and navigation instruction following -- and it could be easily adapted for annotating walking tours, finding and labeling landmarks or objects, and similar tasks. We share best practices learned from using PanGEA in a 20,000 hour annotation effort to collect the Room-Across-Room dataset. We hope that our open-source annotation toolkit and insights will both expedite future data collection efforts and spur innovation on the kinds of grounded language tasks such environments can support.