 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Path: Scaling Vision-and-Language Navigation with Synthetic Instructions and Imitation Learning
Paper and Code
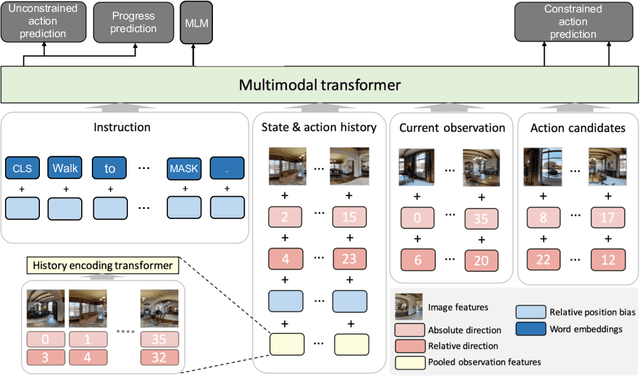
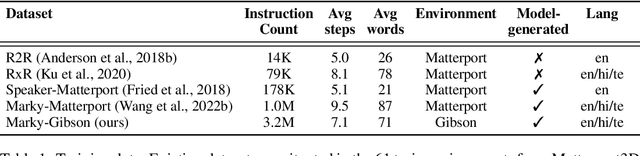
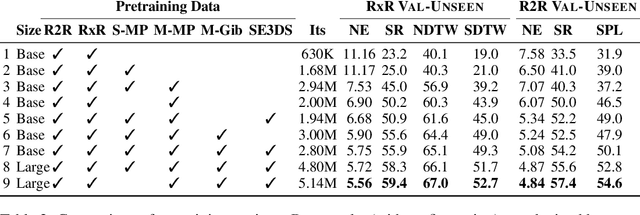
Recent studies in Vision-and-Language Navigation (VLN) train RL agents to execute natural-language navigation instructions in photorealistic environments, as a step towards intelligent agents or robots that can follow human instructions. However, given the scarcity of human instruction data and limited diversity in the training environments, these agents still struggle with complex language grounding and spatial language understanding. Pre-training on large text and image-text datasets from the web has been extensively explored but the improvements are limited. To address the scarcity of in-domain instruction data, we investigate large-scale augmentation with synthetic instructions. We take 500+ indoor environments captured in densely-sampled 360 deg panoramas, construct navigation trajectories through these panoramas, and generate a visually-grounded instruction for each trajectory using Marky (Wang et al., 2022), a high-quality multilingual navigation instruction generator. To further increase the variability of the trajectories, we also synthesize image observations from novel viewpoints using an image-to-image GAN. The resulting dataset of 4.2M instruction-trajectory pairs is two orders of magnitude larger than existing human-annotated datasets, and contains a wider variety of environments and viewpoints. To efficiently leverage data at this scale, we train a transformer agent with imitation learning for over 700M steps of experience. On the challenging Room-across-Room dataset, our approach outperforms all existing RL agents, improving the state-of-the-art NDTW from 71.1 to 79.1 in seen environments, and from 64.6 to 66.8 in unseen test environments. Our work points to a new path to improving instruction-following agents, emphasizing large-scale imitation learning and the development of synthetic instruction generation capabilities.