 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline 3D reconstruction and dense tracking in endoscopic videos
Sep 09, 2024



3D scene reconstruction from stereo endoscopic video data is crucial for advancing surgical interventions. In this work, we present an online framework for online, dense 3D scene reconstruction and tracking, aimed at enhancing surgical scene understanding and assisting interventions. Our method dynamically extends a canonical scene representation using Gaussian splatting, while modeling tissue deformations through a sparse set of control points. We introduce an efficient online fitting algorithm that optimizes the scene parameters, enabling consistent tracking and accurate reconstruction. Through experiments on the StereoMIS dataset, we demonstrate the effectiveness of our approach, outperforming state-of-the-art tracking methods and achieving comparable performance to offline reconstruction techniques. Our work enables various downstream applications thus contributing to advancing the capabilities of surgical assistance systems.
Learning Invariant Representation of Tasks for Robust Surgical State Estimation
Feb 18, 2021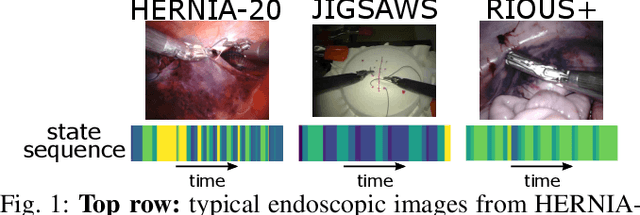
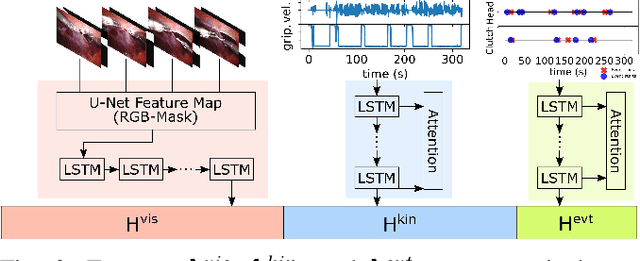
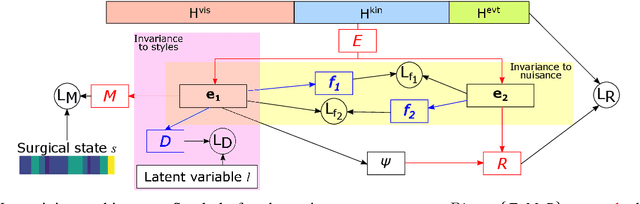
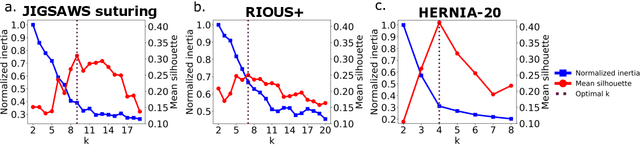
Surgical state estimators in robot-assisted surgery (RAS) - especially those trained via learning techniques - rely heavily on datasets that capture surgeon actions in laboratory or real-world surgical tasks. Real-world RAS datasets are costly to acquire, are obtained from multiple surgeons who may use different surgical strategies, and are recorded under uncontrolled conditions in highly complex environments. The combination of high diversity and limited data calls for new learning methods that are robust and invariant to operating conditions and surgical techniques. We propose StiseNet, a Surgical Task Invariance State Estimation Network with an invariance induction framework that minimizes the effects of variations in surgical technique and operating environments inherent to RAS datasets. StiseNet's adversarial architecture learns to separate nuisance factors from information needed for surgical state estimation. StiseNet is shown to outperform state-of-the-art state estimation methods on three datasets (including a new real-world RAS dataset: HERNIA-20).
Stereo Correspondence and Reconstruction of Endoscopic Data Challenge
Jan 28, 2021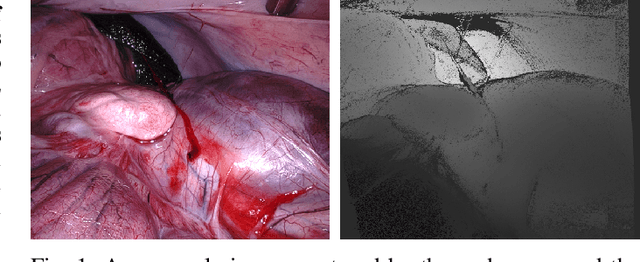
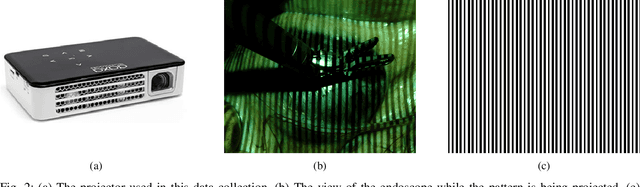
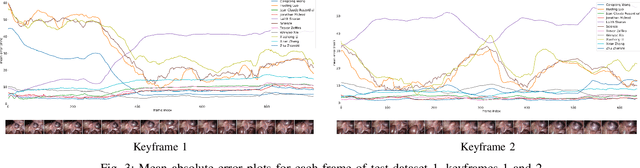
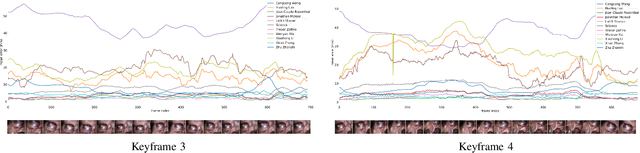
The stereo correspondence and reconstruction of endoscopic data sub-challenge was organized during the Endovis challenge at MICCAI 2019 in Shenzhen, China. The task was to perform dense depth estimation using 7 training datasets and 2 test sets of structured light data captured using porcine cadavers. These were provided by a team at Intuitive Surgical. 10 teams participated in the challenge day. This paper contains 3 additional methods which were submitted after the challenge finished as well as a supplemental section from these teams on issues they found with the dataset.
daVinciNet: Joint Prediction of Motion and Surgical State in Robot-Assisted Surgery
Sep 24, 2020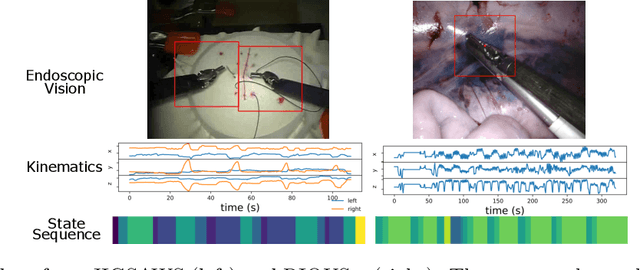
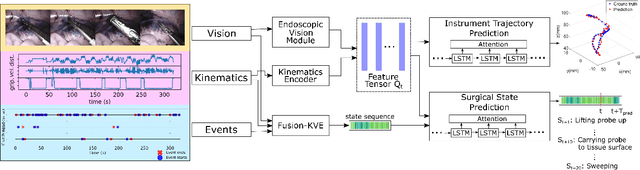
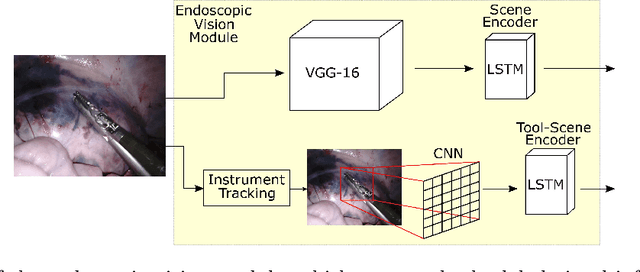
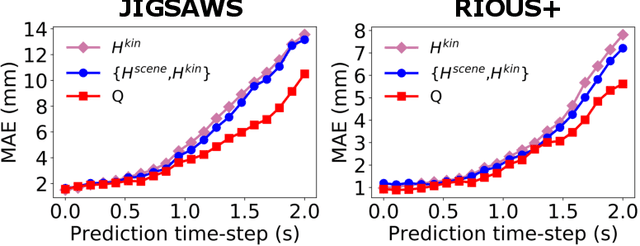
This paper presents a technique to concurrently and jointly predict the future trajectories of surgical instruments and the future state(s) of surgical subtasks in robot-assisted surgeries (RAS) using multiple input sources. Such predictions are a necessary first step towards shared control and supervised autonomy of surgical subtasks. Minute-long surgical subtasks, such as suturing or ultrasound scanning, often have distinguishable tool kinematics and visual features, and can be described as a series of fine-grained states with transition schematics. We propose daVinciNet - an end-to-end dual-task model for robot motion and surgical state predictions. daVinciNet performs concurrent end-effector trajectory and surgical state predictions using features extracted from multiple data streams, including robot kinematics, endoscopic vision, and system events. We evaluate our proposed model on an extended Robotic Intra-Operative Ultrasound (RIOUS+) imaging dataset collected on a da Vinci Xi surgical system and the JHU-ISI Gesture and Skill Assessment Working Set (JIGSAWS). Our model achieves up to 93.85% short-term (0.5s) and 82.11% long-term (2s) state prediction accuracy, as well as 1.07mm short-term and 5.62mm long-term trajectory prediction error.
Temporal Segmentation of Surgical Sub-tasks through Deep Learning with Multiple Data Sources
Feb 07, 2020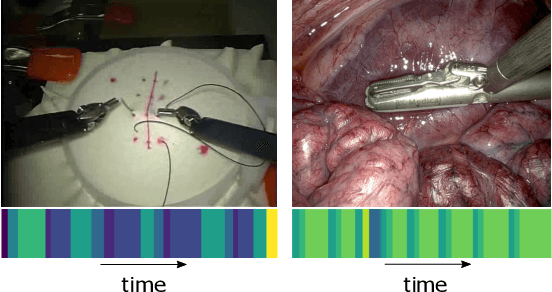
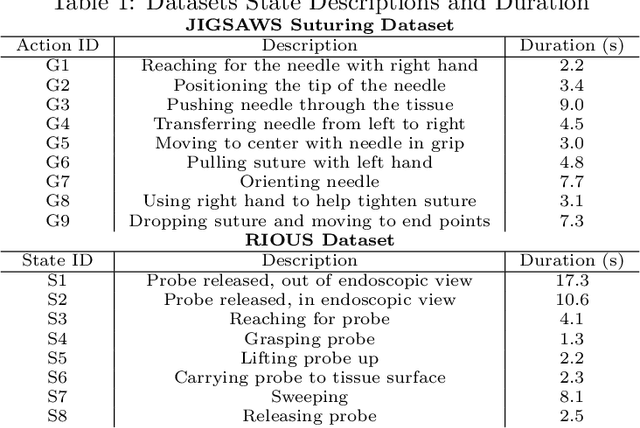
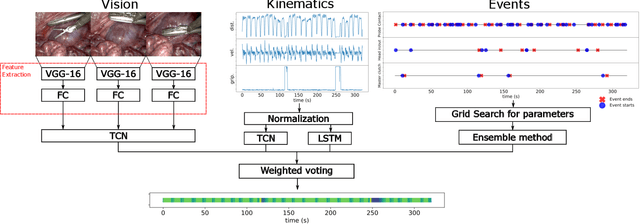
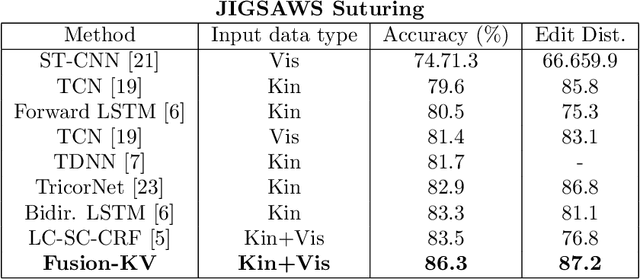
Many tasks in robot-assisted surgeries (RAS) can be represented by finite-state machines (FSMs), where each state represents either an action (such as picking up a needle) or an observation (such as bleeding). A crucial step towards the automation of such surgical tasks is the temporal perception of the current surgical scene, which requires a real-time estimation of the states in the FSMs. The objective of this work is to estimate the current state of the surgical task based on the actions performed or events occurred as the task progresses. We propose Fusion-KVE, a unified surgical state estimation model that incorporates multiple data sources including the Kinematics, Vision, and system Events. Additionally, we examine the strengths and weaknesses of different state estimation models in segmenting states with different representative features or levels of granularity. We evaluate our model on the JHU-ISI Gesture and Skill Assessment Working Set (JIGSAWS), as well as a more complex dataset involving robotic intra-operative ultrasound (RIOUS) imaging, created using the da Vinci Xi surgical system. Our model achieves a superior frame-wise state estimation accuracy up to 89.4%, which improves the state-of-the-art surgical state estimation models in both JIGSAWS suturing dataset and our RIOUS dataset.
2018 Robotic Scene Segmentation Challenge
Feb 03, 2020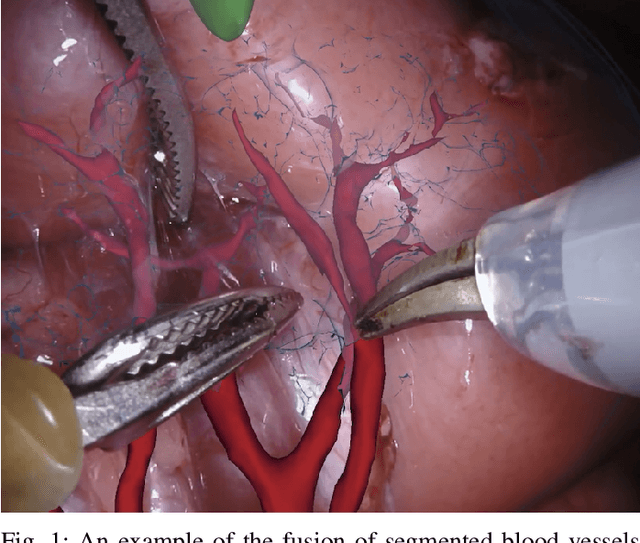
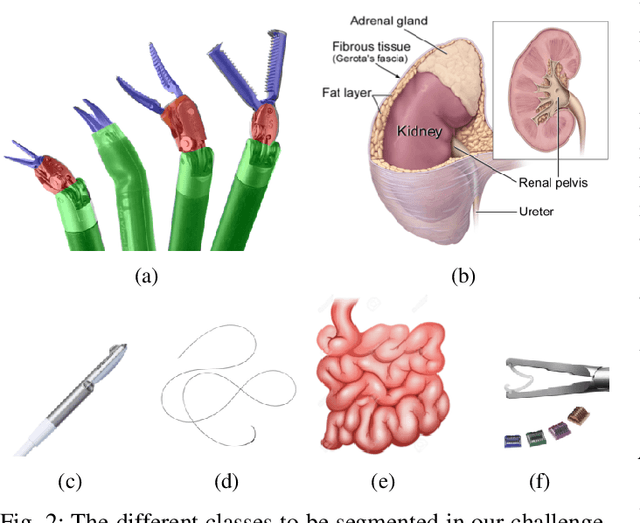
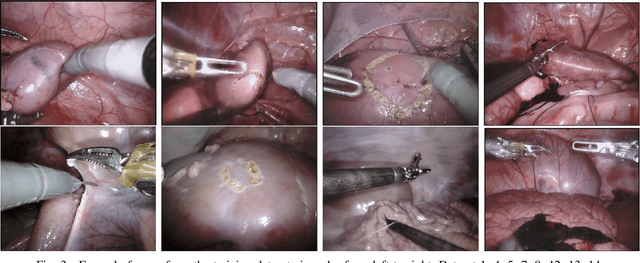
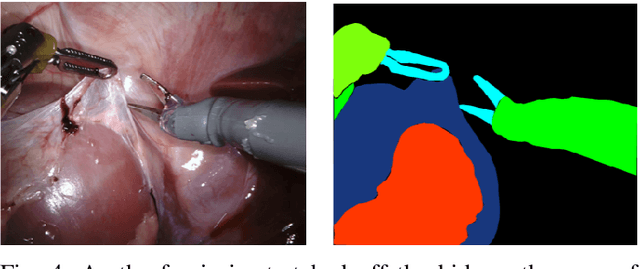
In 2015 we began a sub-challenge at the EndoVis workshop at MICCAI in Munich using endoscope images of ex-vivo tissue with automatically generated annotations from robot forward kinematics and instrument CAD models. However, the limited background variation and simple motion rendered the dataset uninformative in learning about which techniques would be suitable for segmentation in real surgery. In 2017, at the same workshop in Quebec we introduced the robotic instrument segmentation dataset with 10 teams participating in the challenge to perform binary, articulating parts and type segmentation of da Vinci instruments. This challenge included realistic instrument motion and more complex porcine tissue as background and was widely addressed with modifications on U-Nets and other popular CNN architectures. In 2018 we added to the complexity by introducing a set of anatomical objects and medical devices to the segmented classes. To avoid over-complicating the challenge, we continued with porcine data which is dramatically simpler than human tissue due to the lack of fatty tissue occluding many organs.
2017 Robotic Instrument Segmentation Challenge
Feb 21, 2019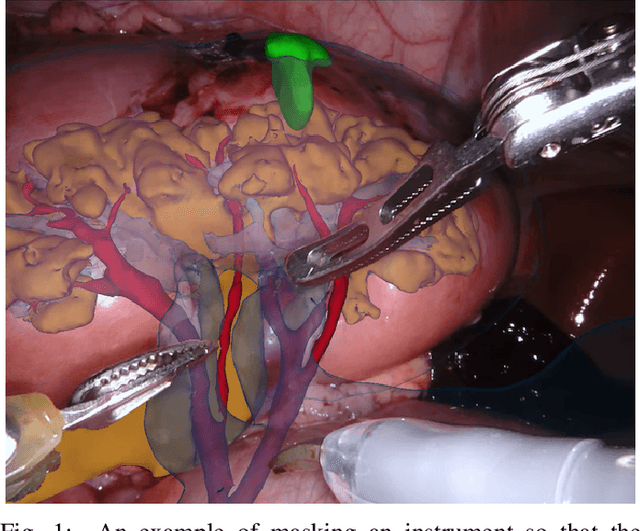
In mainstream computer vision and machine learning, public datasets such as ImageNet, COCO and KITTI have helped drive enormous improvements by enabling researchers to understand the strengths and limitations of different algorithms via performance comparison. However, this type of approach has had limited translation to problems in robotic assisted surgery as this field has never established the same level of common datasets and benchmarking methods. In 2015 a sub-challenge was introduced at the EndoVis workshop where a set of robotic images were provided with automatically generated annotations from robot forward kinematics. However, there were issues with this dataset due to the limited background variation, lack of complex motion and inaccuracies in the annotation. In this work we present the results of the 2017 challenge on robotic instrument segmentation which involved 10 teams participating in binary, parts and type based segmentation of articulated da Vinci robotic instruments.
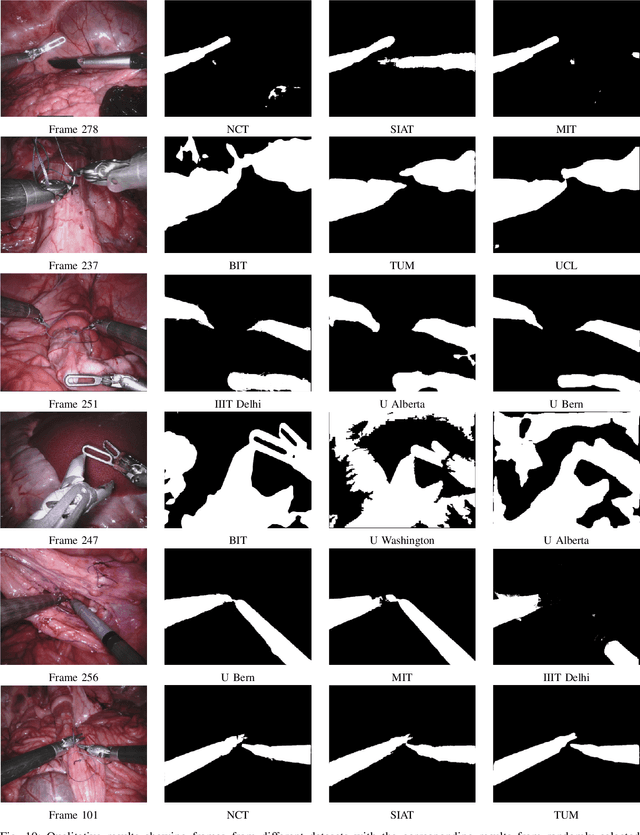
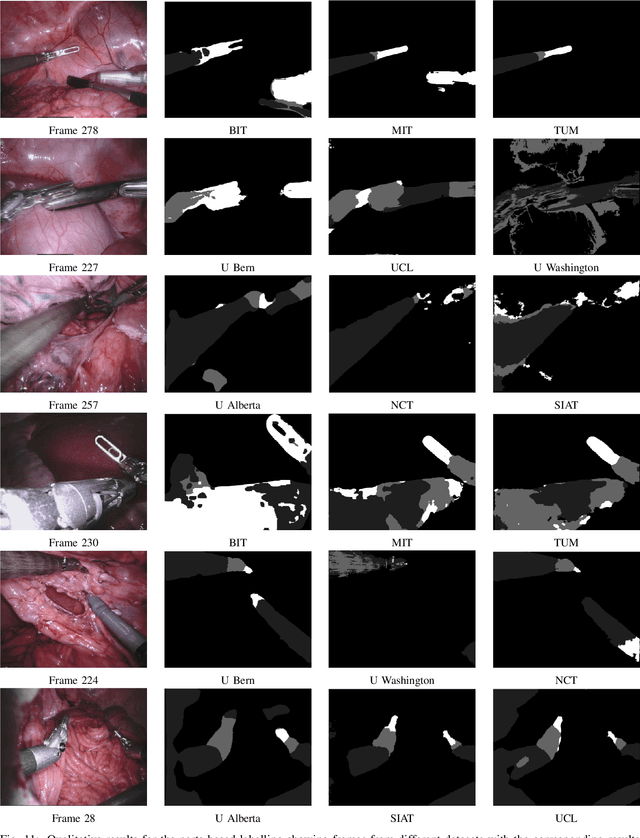
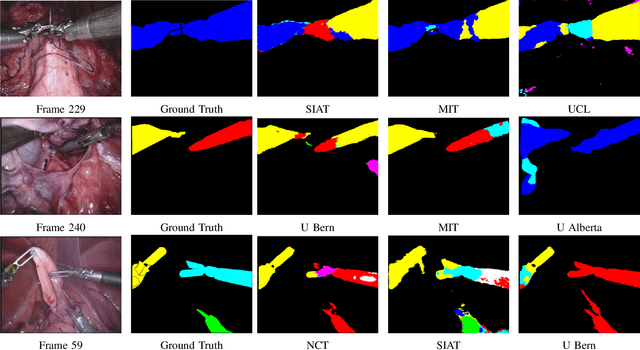
Comparative evaluation of instrument segmentation and tracking methods in minimally invasive surgery
May 07, 2018
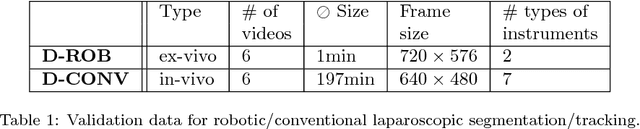

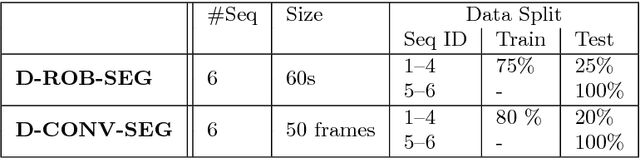
Intraoperative segmentation and tracking of minimally invasive instruments is a prerequisite for computer- and robotic-assisted surgery. Since additional hardware like tracking systems or the robot encoders are cumbersome and lack accuracy, surgical vision is evolving as promising techniques to segment and track the instruments using only the endoscopic images. However, what is missing so far are common image data sets for consistent evaluation and benchmarking of algorithms against each other. The paper presents a comparative validation study of different vision-based methods for instrument segmentation and tracking in the context of robotic as well as conventional laparoscopic surgery. The contribution of the paper is twofold: we introduce a comprehensive validation data set that was provided to the study participants and present the results of the comparative validation study. Based on the results of the validation study, we arrive at the conclusion that modern deep learning approaches outperform other methods in instrument segmentation tasks, but the results are still not perfect. Furthermore, we show that merging results from different methods actually significantly increases accuracy in comparison to the best stand-alone method. On the other hand, the results of the instrument tracking task show that this is still an open challenge, especially during challenging scenarios in conventional laparoscopic surgery.
Deep Residual Learning for Instrument Segmentation in Robotic Surgery
Mar 24, 2017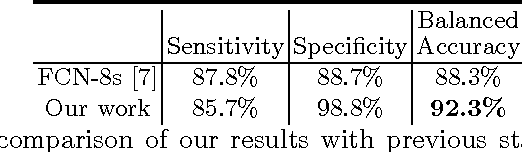

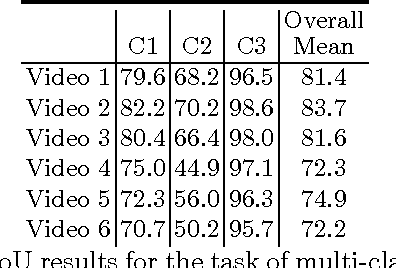
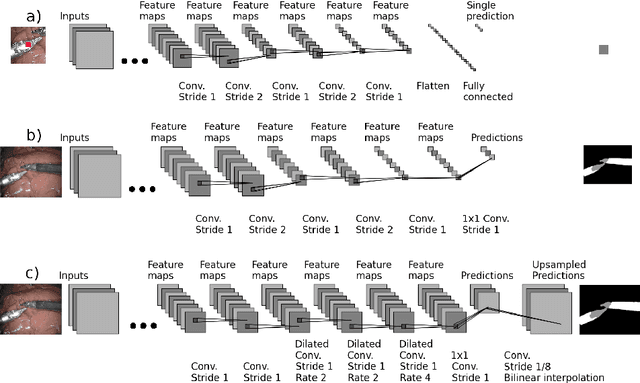
Detection, tracking, and pose estimation of surgical instruments are crucial tasks for computer assistance during minimally invasive robotic surgery. In the majority of cases, the first step is the automatic segmentation of surgical tools. Prior work has focused on binary segmentation, where the objective is to label every pixel in an image as tool or background. We improve upon previous work in two major ways. First, we leverage recent techniques such as deep residual learning and dilated convolutions to advance binary-segmentation performance. Second, we extend the approach to multi-class segmentation, which lets us segment different parts of the tool, in addition to background. We demonstrate the performance of this method on the MICCAI Endoscopic Vision Challenge Robotic Instruments dataset.