 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIsometric Transformations for Image Augmentation in Mueller Matrix Polarimetry
Nov 12, 2024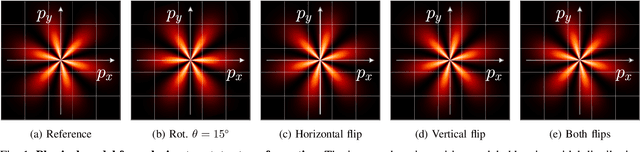

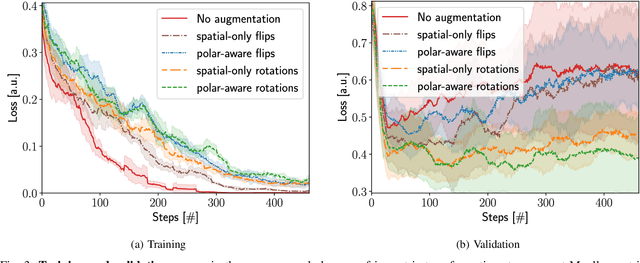
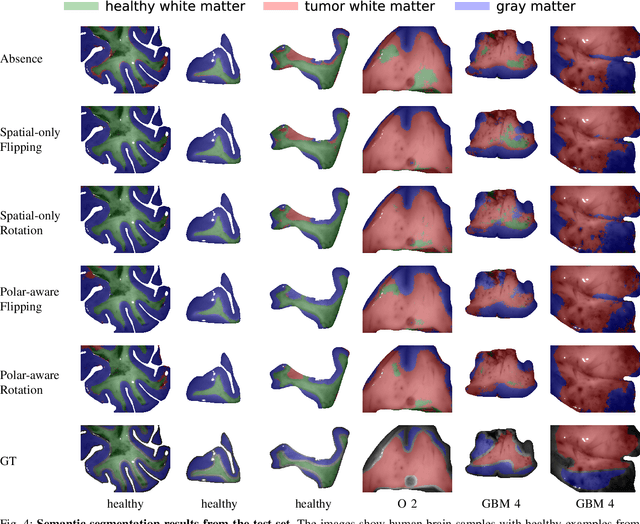
Mueller matrix polarimetry captures essential information about polarized light interactions with a sample, presenting unique challenges for data augmentation in deep learning due to its distinct structure. While augmentations are an effective and affordable way to enhance dataset diversity and reduce overfitting, standard transformations like rotations and flips do not preserve the polarization properties in Mueller matrix images. To this end, we introduce a versatile simulation framework that applies physically consistent rotations and flips to Mueller matrices, tailored to maintain polarization fidelity. Our experimental results across multiple datasets reveal that conventional augmentations can lead to misleading results when applied to polarimetric data, underscoring the necessity of our physics-based approach. In our experiments, we first compare our polarization-specific augmentations against real-world captures to validate their physical consistency. We then apply these augmentations in a semantic segmentation task, achieving substantial improvements in model generalization and performance. This study underscores the necessity of physics-informed data augmentation for polarimetric imaging in deep learning (DL), paving the way for broader adoption and more robust applications across diverse research in the field. In particular, our framework unlocks the potential of DL models for polarimetric datasets with limited sample sizes. Our code implementation is available at github.com/hahnec/polar_augment.
Online 3D reconstruction and dense tracking in endoscopic videos
Sep 09, 2024



3D scene reconstruction from stereo endoscopic video data is crucial for advancing surgical interventions. In this work, we present an online framework for online, dense 3D scene reconstruction and tracking, aimed at enhancing surgical scene understanding and assisting interventions. Our method dynamically extends a canonical scene representation using Gaussian splatting, while modeling tissue deformations through a sparse set of control points. We introduce an efficient online fitting algorithm that optimizes the scene parameters, enabling consistent tracking and accurate reconstruction. Through experiments on the StereoMIS dataset, we demonstrate the effectiveness of our approach, outperforming state-of-the-art tracking methods and achieving comparable performance to offline reconstruction techniques. Our work enables various downstream applications thus contributing to advancing the capabilities of surgical assistance systems.
Learning Super-Resolution Ultrasound Localization Microscopy from Radio-Frequency Data
Nov 07, 2023Ultrasound Localization Microscopy (ULM) enables imaging of vascular structures in the micrometer range by accumulating contrast agent particle locations over time. Precise and efficient target localization accuracy remains an active research topic in the ULM field to further push the boundaries of this promising medical imaging technology. Existing work incorporates Delay-And-Sum (DAS) beamforming into particle localization pipelines, which ultimately determines the ULM image resolution capability. In this paper we propose to feed unprocessed Radio-Frequency (RF) data into a super-resolution network while bypassing DAS beamforming and its limitations. To facilitate this, we demonstrate label projection and inverse point transformation between B-mode and RF coordinate space as required by our approach. We assess our method against state-of-the-art techniques based on a public dataset featuring in silico and in vivo data. Results from our RF-trained network suggest that excluding DAS beamforming offers a great potential to optimize on the ULM resolution performance.
RF-ULM: Deep Learning for Radio-Frequency Ultrasound Localization Microscopy
Oct 02, 2023



In Ultrasound Localization Microscopy (ULM), achieving high-resolution images relies on the precise localization of contrast agent particles across consecutive beamformed frames. However, our study uncovers an enormous potential: The process of delay-and-sum beamforming leads to an irreversible reduction of Radio-Frequency (RF) data, while its implications for localization remain largely unexplored. The rich contextual information embedded within RF wavefronts, including their hyperbolic shape and phase, offers great promise for guiding Deep Neural Networks (DNNs) in challenging localization scenarios. To fully exploit this data, we propose to directly localize scatterers in RF signals. Our approach involves a custom super-resolution DNN using learned feature channel shuffling and a novel semi-global convolutional sampling block tailored for reliable and accurate localization in RF input data. Additionally, we introduce a geometric point transformation that facilitates seamless mapping between B-mode and RF spaces. To validate the effectiveness of our method and understand the impact of beamforming, we conduct an extensive comparison with State-Of-The-Art (SOTA) techniques in ULM. We present the inaugural in vivo results from an RF-trained DNN, highlighting its real-world practicality. Our findings show that RF-ULM bridges the domain gap between synthetic and real datasets, offering a considerable advantage in terms of precision and complexity. To enable the broader research community to benefit from our findings, our code and the associated SOTA methods are made available at https://github.com/hahnec/rf-ulm.
StofNet: Super-resolution Time of Flight Network
Aug 23, 2023Time of Flight (ToF) is a prevalent depth sensing technology in the fields of robotics, medical imaging, and non-destructive testing. Yet, ToF sensing faces challenges from complex ambient conditions making an inverse modelling from the sparse temporal information intractable. This paper highlights the potential of modern super-resolution techniques to learn varying surroundings for a reliable and accurate ToF detection. Unlike existing models, we tailor an architecture for sub-sample precise semi-global signal localization by combining super-resolution with an efficient residual contraction block to balance between fine signal details and large scale contextual information. We consolidate research on ToF by conducting a benchmark comparison against six state-of-the-art methods for which we employ two publicly available datasets. This includes the release of our SToF-Chirp dataset captured by an airborne ultrasound transducer. Results showcase the superior performance of our proposed StofNet in terms of precision, reliability and model complexity. Our code is available at https://github.com/hahnec/stofnet.
Geometric Ultrasound Localization Microscopy
Jul 18, 2023Contrast-Enhanced Ultra-Sound (CEUS) has become a viable method for non-invasive, dynamic visualization in medical diagnostics, yet Ultrasound Localization Microscopy (ULM) has enabled a revolutionary breakthrough by offering ten times higher resolution. To date, Delay-And-Sum (DAS) beamformers are used to render ULM frames, ultimately determining the image resolution capability. To take full advantage of ULM, this study questions whether beamforming is the most effective processing step for ULM, suggesting an alternative approach that relies solely on Time-Difference-of-Arrival (TDoA) information. To this end, a novel geometric framework for micro bubble localization via ellipse intersections is proposed to overcome existing beamforming limitations. We present a benchmark comparison based on a public dataset for which our geometric ULM outperforms existing baseline methods in terms of accuracy and robustness while only utilizing a portion of the available transducer data.
3-Dimensional Sonic Phase-invariant Echo Localization
Jun 19, 2023Parallax and Time-of-Flight (ToF) are often regarded as complementary in robotic vision where various light and weather conditions remain challenges for advanced camera-based 3-Dimensional (3-D) reconstruction. To this end, this paper establishes Parallax among Corresponding Echoes (PaCE) to triangulate acoustic ToF pulses from arbitrary sensor positions in 3-D space for the first time. This is achieved through a novel round-trip reflection model that pinpoints targets at the intersection of ellipsoids, which are spanned by sensor locations and detected arrival times. Inter-channel echo association becomes a crucial prerequisite for target detection and is learned from feature similarity obtained by a stack of Siamese Multi-Layer Perceptrons (MLPs). The PaCE algorithm enables phase-invariant 3-D object localization from only 1 isotropic emitter and at least 3 ToF receivers with relaxed sensor position constraints. Experiments are conducted with airborne ultrasound sensor hardware and back this hypothesis with quantitative results.
Learning How To Robustly Estimate Camera Pose in Endoscopic Videos
Apr 17, 2023Purpose: Surgical scene understanding plays a critical role in the technology stack of tomorrow's intervention-assisting systems in endoscopic surgeries. For this, tracking the endoscope pose is a key component, but remains challenging due to illumination conditions, deforming tissues and the breathing motion of organs. Method: We propose a solution for stereo endoscopes that estimates depth and optical flow to minimize two geometric losses for camera pose estimation. Most importantly, we introduce two learned adaptive per-pixel weight mappings that balance contributions according to the input image content. To do so, we train a Deep Declarative Network to take advantage of the expressiveness of deep-learning and the robustness of a novel geometric-based optimization approach. We validate our approach on the publicly available SCARED dataset and introduce a new in-vivo dataset, StereoMIS, which includes a wider spectrum of typically observed surgical settings. Results: Our method outperforms state-of-the-art methods on average and more importantly, in difficult scenarios where tissue deformations and breathing motion are visible. We observed that our proposed weight mappings attenuate the contribution of pixels on ambiguous regions of the images, such as deforming tissues. Conclusion: We demonstrate the effectiveness of our solution to robustly estimate the camera pose in challenging endoscopic surgical scenes. Our contributions can be used to improve related tasks like simultaneous localization and mapping (SLAM) or 3D reconstruction, therefore advancing surgical scene understanding in minimally-invasive surgery.
Multimodal Exponentially Modified Gaussian Oscillators
Sep 25, 2022



Acoustic modeling serves de-noising, data reconstruction, model-based testing and classification in audio processing tasks. Previous work dealt with signal parameterization of wave envelopes either by multiple Gaussian distributions or a single asymmetric Gaussian curve, which both fall short in representing super-imposed echoes sufficiently well. This study presents a three-stage Multimodal Exponentially Modified Gaussian (MEMG) model with an optional oscillating term that regards captured echoes as a superposition of univariate probability distributions in the temporal domain. With this, synthetic ultrasound signals suffering from artifacts can be fully recovered, which is backed by quantitative assessment. Real data experimentation is carried out to demonstrate the classification capability of the acquired features with object reflections being detected at different points in time. The code is available at https://github.com/hahnec/multimodal_emg.
PlenoptiCam v1.0: A light-field imaging framework
Oct 14, 2020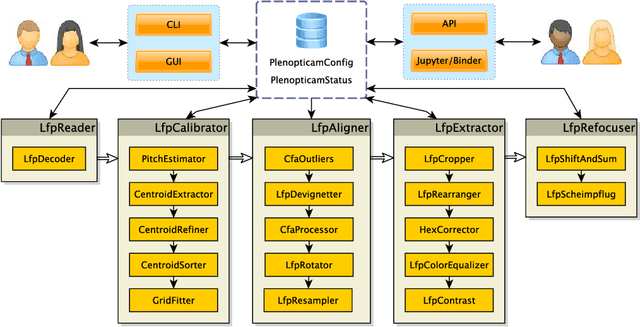
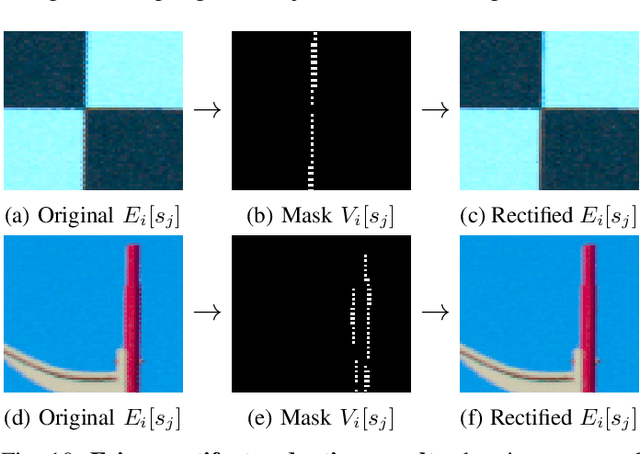
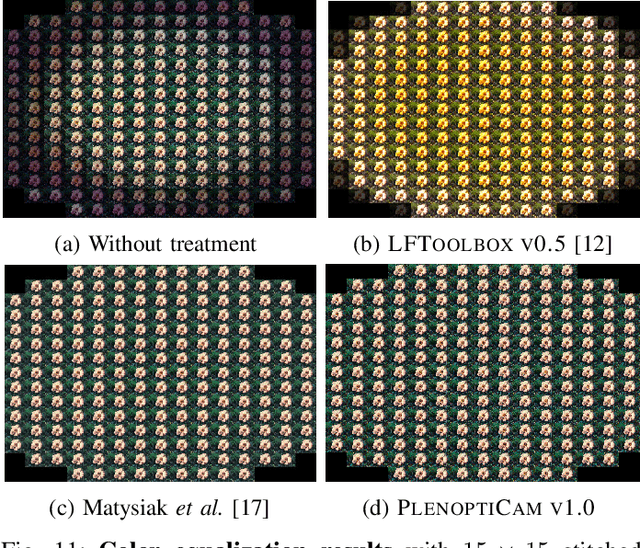
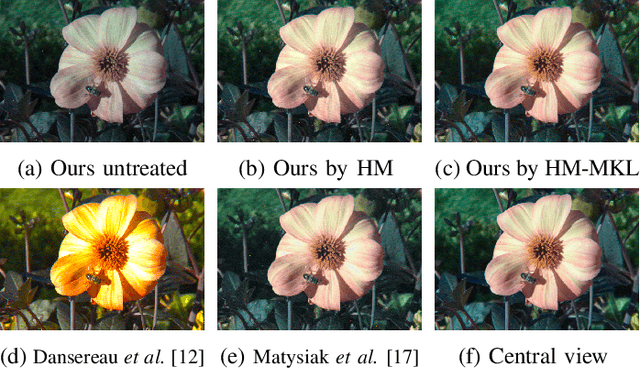
Light-field cameras play a vital role for rich 3-D information retrieval in narrow range depth sensing applications. The key obstacle in composing light-fields from exposures taken by a plenoptic camera is to computationally calibrate, re-align and rearrange four-dimensional image data. Several attempts have been proposed to enhance the overall image quality by tailoring pipelines dedicated to particular plenoptic cameras and improving the color consistency across viewpoints at the expense of high computational loads. The framework presented herein advances prior outcomes thanks to its cost-effective color equalization from parallax-invariant probability distribution transfers and a novel micro image scale-space analysis for generic camera calibration independent of the lens specifications. Our framework compensates for hot-pixels, resampling artifacts, micro image grid rotations just as vignetting in an innovative way to enable superior quality in sub-aperture image extraction, computational refocusing and Scheimpflug rendering with sub-sampling capabilities. Benchmark comparisons using established image metrics suggest that our proposed pipeline outperforms state-of-the-art tool chains in the majority of cases. The software described in this paper is released under an open-source license offering cross-platform compatibility, few dependencies and a lean graphical user interface to make the reproduction of results and the experimentation with plenoptic camera technology convenient for peer researchers, developers, photographers, data scientists and everyone else working in this field.