 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlenoptiCam v1.0: A light-field imaging framework
Oct 14, 2020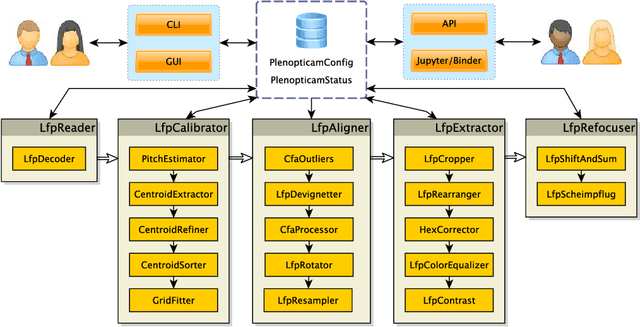
Light-field cameras play a vital role for rich 3-D information retrieval in narrow range depth sensing applications. The key obstacle in composing light-fields from exposures taken by a plenoptic camera is to computationally calibrate, re-align and rearrange four-dimensional image data. Several attempts have been proposed to enhance the overall image quality by tailoring pipelines dedicated to particular plenoptic cameras and improving the color consistency across viewpoints at the expense of high computational loads. The framework presented herein advances prior outcomes thanks to its cost-effective color equalization from parallax-invariant probability distribution transfers and a novel micro image scale-space analysis for generic camera calibration independent of the lens specifications. Our framework compensates for hot-pixels, resampling artifacts, micro image grid rotations just as vignetting in an innovative way to enable superior quality in sub-aperture image extraction, computational refocusing and Scheimpflug rendering with sub-sampling capabilities. Benchmark comparisons using established image metrics suggest that our proposed pipeline outperforms state-of-the-art tool chains in the majority of cases. The software described in this paper is released under an open-source license offering cross-platform compatibility, few dependencies and a lean graphical user interface to make the reproduction of results and the experimentation with plenoptic camera technology convenient for peer researchers, developers, photographers, data scientists and everyone else working in this field.
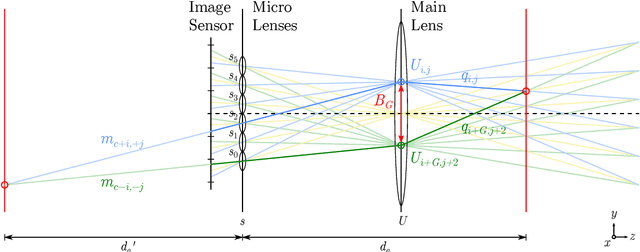
Baseline and Triangulation Geometry in a Standard Plenoptic Camera
Oct 09, 2020



In this paper, we demonstrate light field triangulation to determine depth distances and baselines in a plenoptic camera. Advances in micro lenses and image sensors have enabled plenoptic cameras to capture a scene from different viewpoints with sufficient spatial resolution. While object distances can be inferred from disparities in a stereo viewpoint pair using triangulation, this concept remains ambiguous when applied in the case of plenoptic cameras. We present a geometrical light field model allowing the triangulation to be applied to a plenoptic camera in order to predict object distances or specify baselines as desired. It is shown that distance estimates from our novel method match those of real objects placed in front of the camera. Additional benchmark tests with an optical design software further validate the model's accuracy with deviations of less than +-0.33 % for several main lens types and focus settings. A variety of applications in the automotive and robotics field can benefit from this estimation model.
PlenoptiSign: an optical design tool for plenoptic imaging
Jun 01, 2020


Plenoptic imaging enables a light-field to be captured by a single monocular objective lens and an array of micro lenses attached to an image sensor. Metric distances of the light-field's depth planes remain unapparent prior to acquisition. Recent research showed that sampled depth locations rely on the parameters of the system's optical components. This paper presents PlenoptiSign, which implements these findings as a Python software package to help assist in an experimental or prototyping stage of a plenoptic system.