 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Invariant Representation of Tasks for Robust Surgical State Estimation
Paper and Code
Feb 18, 2021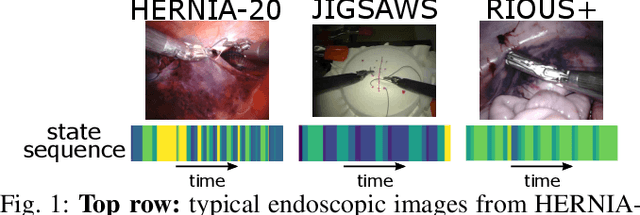
Surgical state estimators in robot-assisted surgery (RAS) - especially those trained via learning techniques - rely heavily on datasets that capture surgeon actions in laboratory or real-world surgical tasks. Real-world RAS datasets are costly to acquire, are obtained from multiple surgeons who may use different surgical strategies, and are recorded under uncontrolled conditions in highly complex environments. The combination of high diversity and limited data calls for new learning methods that are robust and invariant to operating conditions and surgical techniques. We propose StiseNet, a Surgical Task Invariance State Estimation Network with an invariance induction framework that minimizes the effects of variations in surgical technique and operating environments inherent to RAS datasets. StiseNet's adversarial architecture learns to separate nuisance factors from information needed for surgical state estimation. StiseNet is shown to outperform state-of-the-art state estimation methods on three datasets (including a new real-world RAS dataset: HERNIA-20).