 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Latent Neural Rendering
Dec 13, 2023
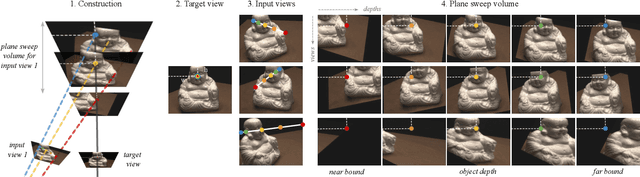


A recent trend among generalizable novel view synthesis methods is to learn a rendering operator acting over single camera rays. This approach is promising because it removes the need for explicit volumetric rendering, but it effectively treats target images as collections of independent pixels. Here, we propose to learn a global rendering operator acting over all camera rays jointly. We show that the right representation to enable such rendering is the 5-dimensional plane sweep volume, consisting of the projection of the input images on a set of planes facing the target camera. Based on this understanding, we introduce our Convolutional Global Latent Renderer (ConvGLR), an efficient convolutional architecture that performs the rendering operation globally in a low-resolution latent space. Experiments on various datasets under sparse and generalizable setups show that our approach consistently outperforms existing methods by significant margins.
Efficient View Synthesis and 3D-based Multi-Frame Denoising with Multiplane Feature Representations
Apr 05, 2023While current multi-frame restoration methods combine information from multiple input images using 2D alignment techniques, recent advances in novel view synthesis are paving the way for a new paradigm relying on volumetric scene representations. In this work, we introduce the first 3D-based multi-frame denoising method that significantly outperforms its 2D-based counterparts with lower computational requirements. Our method extends the multiplane image (MPI) framework for novel view synthesis by introducing a learnable encoder-renderer pair manipulating multiplane representations in feature space. The encoder fuses information across views and operates in a depth-wise manner while the renderer fuses information across depths and operates in a view-wise manner. The two modules are trained end-to-end and learn to separate depths in an unsupervised way, giving rise to Multiplane Feature (MPF) representations. Experiments on the Spaces and Real Forward-Facing datasets as well as on raw burst data validate our approach for view synthesis, multi-frame denoising, and view synthesis under noisy conditions.
Tunable Convolutions with Parametric Multi-Loss Optimization
Apr 03, 2023Behavior of neural networks is irremediably determined by the specific loss and data used during training. However it is often desirable to tune the model at inference time based on external factors such as preferences of the user or dynamic characteristics of the data. This is especially important to balance the perception-distortion trade-off of ill-posed image-to-image translation tasks. In this work, we propose to optimize a parametric tunable convolutional layer, which includes a number of different kernels, using a parametric multi-loss, which includes an equal number of objectives. Our key insight is to use a shared set of parameters to dynamically interpolate both the objectives and the kernels. During training, these parameters are sampled at random to explicitly optimize all possible combinations of objectives and consequently disentangle their effect into the corresponding kernels. During inference, these parameters become interactive inputs of the model hence enabling reliable and consistent control over the model behavior. Extensive experimental results demonstrate that our tunable convolutions effectively work as a drop-in replacement for traditional convolutions in existing neural networks at virtually no extra computational cost, outperforming state-of-the-art control strategies in a wide range of applications; including image denoising, deblurring, super-resolution, and style transfer.
Model-Based Image Signal Processors via Learnable Dictionaries
Jan 10, 2022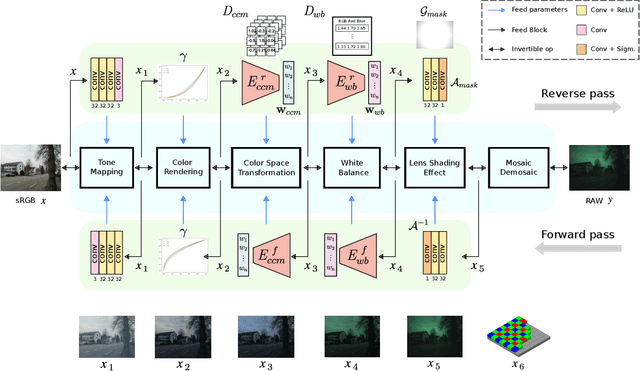


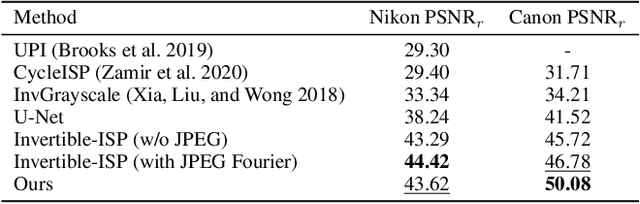
Digital cameras transform sensor RAW readings into RGB images by means of their Image Signal Processor (ISP). Computational photography tasks such as image denoising and colour constancy are commonly performed in the RAW domain, in part due to the inherent hardware design, but also due to the appealing simplicity of noise statistics that result from the direct sensor readings. Despite this, the availability of RAW images is limited in comparison with the abundance and diversity of available RGB data. Recent approaches have attempted to bridge this gap by estimating the RGB to RAW mapping: handcrafted model-based methods that are interpretable and controllable usually require manual parameter fine-tuning, while end-to-end learnable neural networks require large amounts of training data, at times with complex training procedures, and generally lack interpretability and parametric control. Towards addressing these existing limitations, we present a novel hybrid model-based and data-driven ISP that builds on canonical ISP operations and is both learnable and interpretable. Our proposed invertible model, capable of bidirectional mapping between RAW and RGB domains, employs end-to-end learning of rich parameter representations, i.e. dictionaries, that are free from direct parametric supervision and additionally enable simple and plausible data augmentation. We evidence the value of our data generation process by extensive experiments under both RAW image reconstruction and RAW image denoising tasks, obtaining state-of-the-art performance in both. Additionally, we show that our ISP can learn meaningful mappings from few data samples, and that denoising models trained with our dictionary-based data augmentation are competitive despite having only few or zero ground-truth labels.
Residual Contrastive Learning for Joint Demosaicking and Denoising
Jun 18, 2021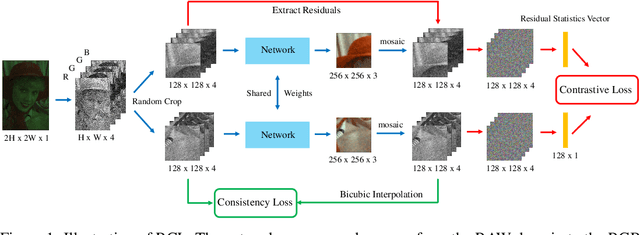



The breakthrough of contrastive learning (CL) has fueled the recent success of self-supervised learning (SSL) in high-level vision tasks on RGB images. However, CL is still ill-defined for low-level vision tasks, such as joint demosaicking and denoising (JDD), in the RAW domain. To bridge this methodological gap, we present a novel CL approach on RAW images, residual contrastive learning (RCL), which aims to learn meaningful representations for JDD. Our work is built on the assumption that noise contained in each RAW image is signal-dependent, thus two crops from the same RAW image should have more similar noise distribution than two crops from different RAW images. We use residuals as a discriminative feature and the earth mover's distance to measure the distribution divergence for the contrastive loss. To evaluate the proposed CL strategy, we simulate a series of unsupervised JDD experiments with large-scale data corrupted by synthetic signal-dependent noise, where we set a new benchmark for unsupervised JDD tasks with unknown (random) noise variance. Our empirical study not only validates that CL can be applied on distributions (c.f. features), but also exposes the lack of robustness of previous non-ML and SSL JDD methods when the statistics of the noise are unknown, thus providing some further insight into signal-dependent noise problems.
Fast Camera Image Denoising on Mobile GPUs with Deep Learning, Mobile AI 2021 Challenge: Report
May 17, 2021

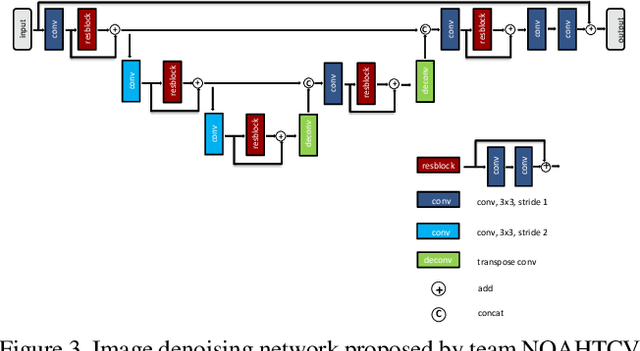
Image denoising is one of the most critical problems in mobile photo processing. While many solutions have been proposed for this task, they are usually working with synthetic data and are too computationally expensive to run on mobile devices. To address this problem, we introduce the first Mobile AI challenge, where the target is to develop an end-to-end deep learning-based image denoising solution that can demonstrate high efficiency on smartphone GPUs. For this, the participants were provided with a novel large-scale dataset consisting of noisy-clean image pairs captured in the wild. The runtime of all models was evaluated on the Samsung Exynos 2100 chipset with a powerful Mali GPU capable of accelerating floating-point and quantized neural networks. The proposed solutions are fully compatible with any mobile GPU and are capable of processing 480p resolution images under 40-80 ms while achieving high fidelity results. A detailed description of all models developed in the challenge is provided in this paper.
NTIRE 2021 Challenge on Quality Enhancement of Compressed Video: Methods and Results
May 02, 2021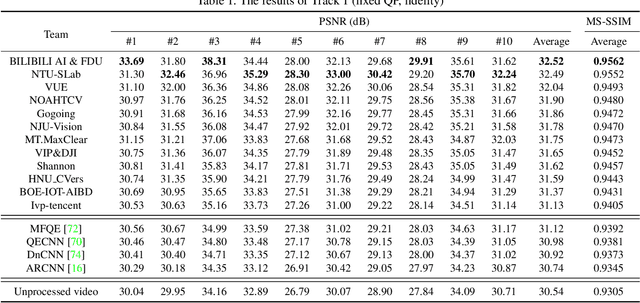
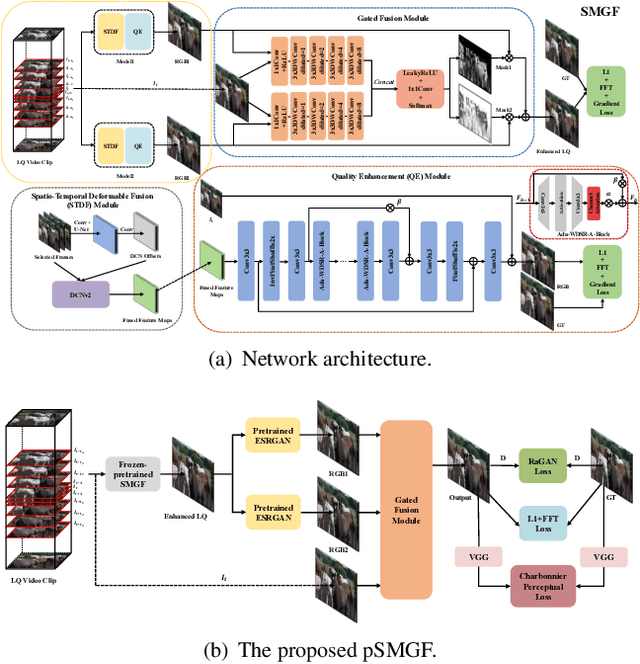
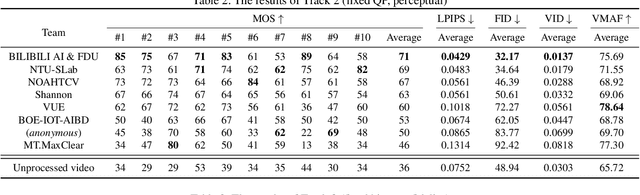
This paper reviews the first NTIRE challenge on quality enhancement of compressed video, with a focus on the proposed methods and results. In this challenge, the new Large-scale Diverse Video (LDV) dataset is employed. The challenge has three tracks. Tracks 1 and 2 aim at enhancing the videos compressed by HEVC at a fixed QP, while Track 3 is designed for enhancing the videos compressed by x265 at a fixed bit-rate. Besides, the quality enhancement of Tracks 1 and 3 targets at improving the fidelity (PSNR), and Track 2 targets at enhancing the perceptual quality. The three tracks totally attract 482 registrations. In the test phase, 12 teams, 8 teams and 11 teams submitted the final results of Tracks 1, 2 and 3, respectively. The proposed methods and solutions gauge the state-of-the-art of video quality enhancement. The homepage of the challenge: https://github.com/RenYang-home/NTIRE21_VEnh
Efficient Multi-Stage Video Denoising with Recurrent Spatio-Temporal Fusion
Mar 09, 2021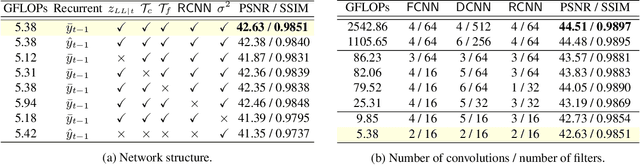
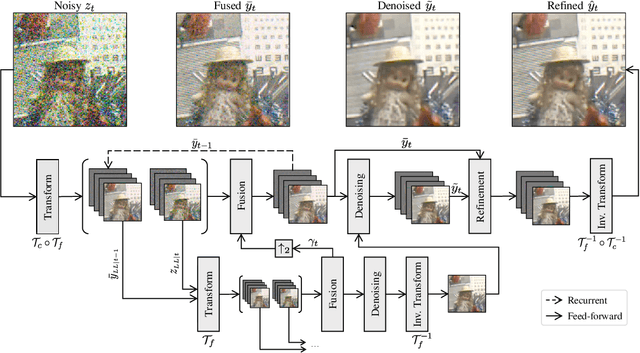
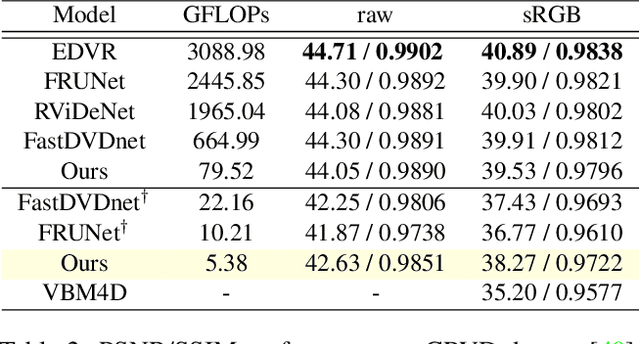
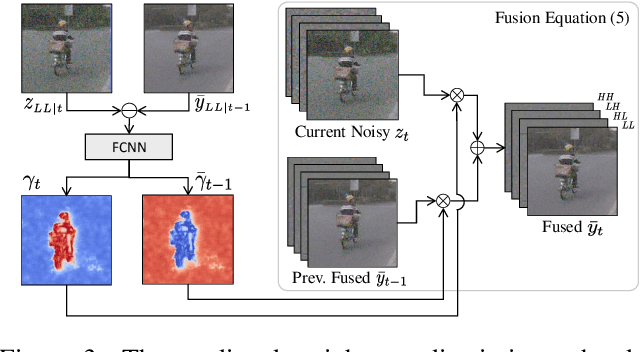
In recent years, methods based on deep learning have achieved unparalleled performance at the cost of large computational complexity. In this work, we propose an Efficient Multi-stage Video Denoising algorithm, called EMVD, to drastically reduce the complexity while maintaining or even improving the performance. First, a fusion stage reduces the noise through a recursive combination of all past frames in the video. Then, a denoising stage removes the noise in the fused frame. Finally, a refinement stage restores the missing high frequency in the denoised frame. All stages operate on a transform-domain representation obtained by learnable and invertible linear operators which simultaneously increase accuracy and decrease complexity of the model. A single loss on the final output is sufficient for successful convergence, hence making EMVD easy to train. Experiments on real raw data demonstrate that EMVD outperforms the state of the art when complexity is constrained, and even remains competitive against methods whose complexities are several orders of magnitude higher. The low complexity and memory requirements of EMVD enable real-time video denoising on low-powered commercial SoC.
Diagnosing and Preventing Instabilities in Recurrent Video Processing
Oct 17, 2020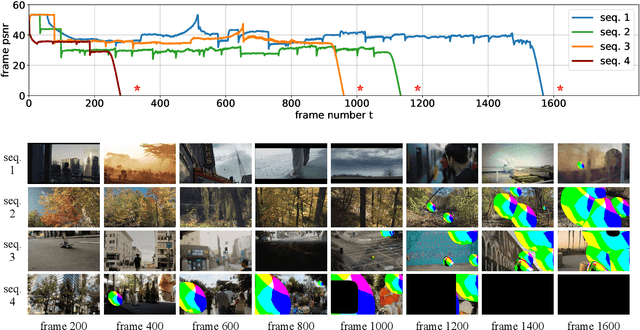


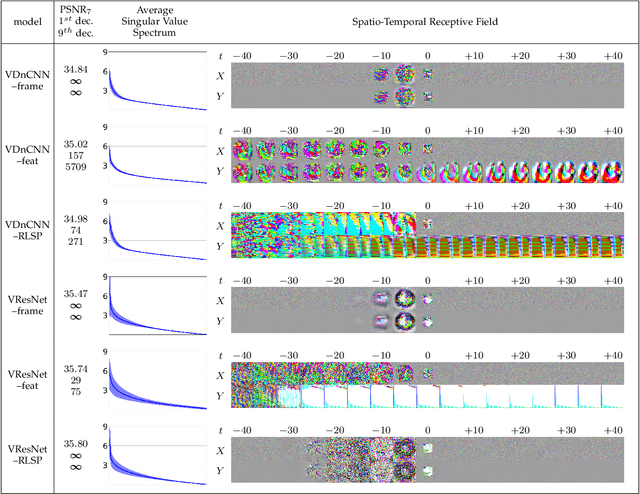
Recurrent models are becoming a popular choice for video enhancement tasks such as video denoising. In this work, we focus on their stability as dynamical systems and show that they tend to fail catastrophically at inference time on long video sequences. To address this issue, we (1) introduce a diagnostic tool which produces adversarial input sequences optimized to trigger instabilities and that can be interpreted as visualizations of spatio-temporal receptive fields, and (2) propose two approaches to enforce the stability of a model: constraining the spectral norm or constraining the stable rank of its convolutional layers. We then introduce Stable Rank Normalization of the Layers (SRNL), a new algorithm that enforces these constraints, and verify experimentally that it successfully results in stable recurrent video processing.
NTIRE 2020 Challenge on Real Image Denoising: Dataset, Methods and Results
May 08, 2020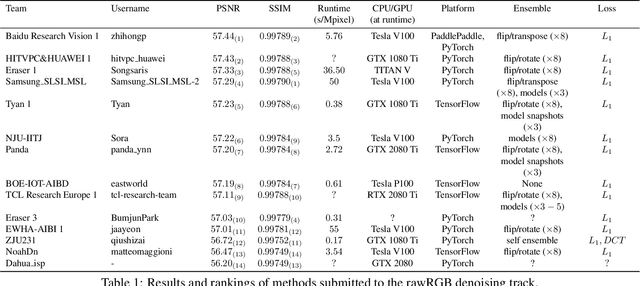
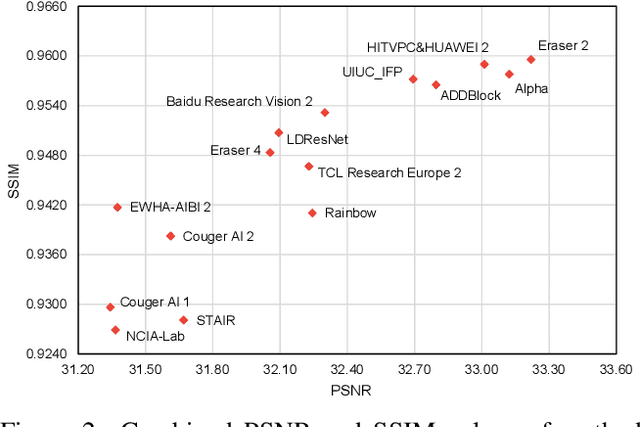
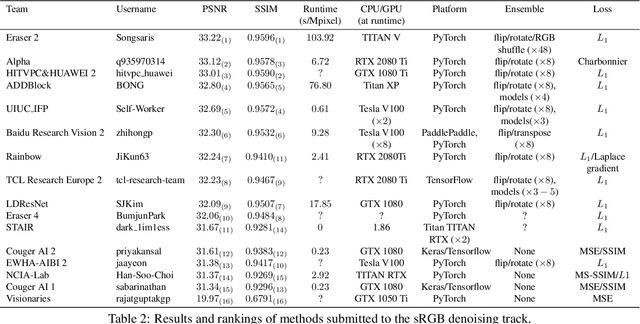
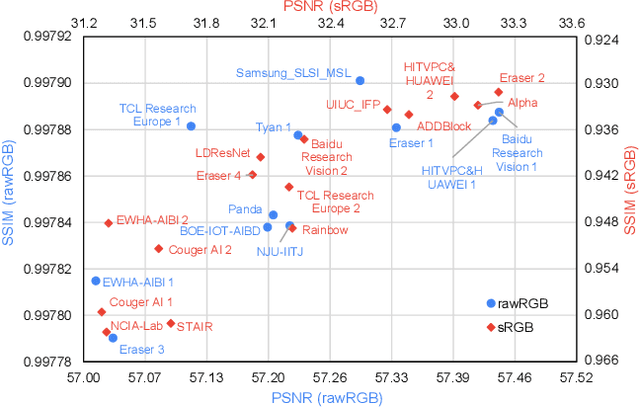
This paper reviews the NTIRE 2020 challenge on real image denoising with focus on the newly introduced dataset, the proposed methods and their results. The challenge is a new version of the previous NTIRE 2019 challenge on real image denoising that was based on the SIDD benchmark. This challenge is based on a newly collected validation and testing image datasets, and hence, named SIDD+. This challenge has two tracks for quantitatively evaluating image denoising performance in (1) the Bayer-pattern rawRGB and (2) the standard RGB (sRGB) color spaces. Each track ~250 registered participants. A total of 22 teams, proposing 24 methods, competed in the final phase of the challenge. The proposed methods by the participating teams represent the current state-of-the-art performance in image denoising targeting real noisy images. The newly collected SIDD+ datasets are publicly available at: https://bit.ly/siddplus_data.