 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Spatial Frequency: Pixel-wise Temporal Frequency-based Deepfake Video Detection
Jul 03, 2025We introduce a deepfake video detection approach that exploits pixel-wise temporal inconsistencies, which traditional spatial frequency-based detectors often overlook. Traditional detectors represent temporal information merely by stacking spatial frequency spectra across frames, resulting in the failure to detect temporal artifacts in the pixel plane. Our approach performs a 1D Fourier transform on the time axis for each pixel, extracting features highly sensitive to temporal inconsistencies, especially in areas prone to unnatural movements. To precisely locate regions containing the temporal artifacts, we introduce an attention proposal module trained in an end-to-end manner. Additionally, our joint transformer module effectively integrates pixel-wise temporal frequency features with spatio-temporal context features, expanding the range of detectable forgery artifacts. Our framework represents a significant advancement in deepfake video detection, providing robust performance across diverse and challenging detection scenarios.
Deepfake-Eval-2024: A Multi-Modal In-the-Wild Benchmark of Deepfakes Circulated in 2024
Mar 05, 2025



In the age of increasingly realistic generative AI, robust deepfake detection is essential for mitigating fraud and disinformation. While many deepfake detectors report high accuracy on academic datasets, we show that these academic benchmarks are out of date and not representative of real-world deepfakes. We introduce Deepfake-Eval-2024, a new deepfake detection benchmark consisting of in-the-wild deepfakes collected from social media and deepfake detection platform users in 2024. Deepfake-Eval-2024 consists of 45 hours of videos, 56.5 hours of audio, and 1,975 images, encompassing the latest manipulation technologies. The benchmark contains diverse media content from 88 different websites in 52 different languages. We find that the performance of open-source state-of-the-art deepfake detection models drops precipitously when evaluated on Deepfake-Eval-2024, with AUC decreasing by 50\% for video, 48\% for audio, and 45\% for image models compared to previous benchmarks. We also evaluate commercial deepfake detection models and models finetuned on Deepfake-Eval-2024, and find that they have superior performance to off-the-shelf open-source models, but do not yet reach the accuracy of deepfake forensic analysts. The dataset is available at https://github.com/nuriachandra/Deepfake-Eval-2024.
Interactive and Expressive Code-Augmented Planning with Large Language Models
Nov 21, 2024



Large Language Models (LLMs) demonstrate strong abilities in common-sense reasoning and interactive decision-making, but often struggle with complex, long-horizon planning tasks. Recent techniques have sought to structure LLM outputs using control flow and other code-adjacent techniques to improve planning performance. These techniques include using variables (to track important information) and functions (to divide complex tasks into smaller re-usable sub-tasks). However, purely code-based approaches can be error-prone and insufficient for handling ambiguous or unstructured data. To address these challenges, we propose REPL-Plan, an LLM planning approach that is fully code-expressive (it can utilize all the benefits of code) while also being dynamic (it can flexibly adapt from errors and use the LLM for fuzzy situations). In REPL-Plan, an LLM solves tasks by interacting with a Read-Eval-Print Loop (REPL), which iteratively executes and evaluates code, similar to language shells or interactive code notebooks, allowing the model to flexibly correct errors and handle tasks dynamically. We demonstrate that REPL-Plan achieves strong results across various planning domains compared to previous methods.
Exploiting Style Latent Flows for Generalizing Deepfake Detection Video Detection
Mar 11, 2024



This paper presents a new approach for the detection of fake videos, based on the analysis of style latent vectors and their abnormal behavior in temporal changes in the generated videos. We discovered that the generated facial videos suffer from the temporal distinctiveness in the temporal changes of style latent vectors, which are inevitable during the generation of temporally stable videos with various facial expressions and geometric transformations. Our framework utilizes the StyleGRU module, trained by contrastive learning, to represent the dynamic properties of style latent vectors. Additionally, we introduce a style attention module that integrates StyleGRU-generated features with content-based features, enabling the detection of visual and temporal artifacts. We demonstrate our approach across various benchmark scenarios in deepfake detection, showing its superiority in cross-dataset and cross-manipulation scenarios. Through further analysis, we also validate the importance of using temporal changes of style latent vectors to improve the generality of deepfake video detection.
Open RL Benchmark: Comprehensive Tracked Experiments for Reinforcement Learning
Feb 05, 2024



In many Reinforcement Learning (RL) papers, learning curves are useful indicators to measure the effectiveness of RL algorithms. However, the complete raw data of the learning curves are rarely available. As a result, it is usually necessary to reproduce the experiments from scratch, which can be time-consuming and error-prone. We present Open RL Benchmark, a set of fully tracked RL experiments, including not only the usual data such as episodic return, but also all algorithm-specific and system metrics. Open RL Benchmark is community-driven: anyone can download, use, and contribute to the data. At the time of writing, more than 25,000 runs have been tracked, for a cumulative duration of more than 8 years. Open RL Benchmark covers a wide range of RL libraries and reference implementations. Special care is taken to ensure that each experiment is precisely reproducible by providing not only the full parameters, but also the versions of the dependencies used to generate it. In addition, Open RL Benchmark comes with a command-line interface (CLI) for easy fetching and generating figures to present the results. In this document, we include two case studies to demonstrate the usefulness of Open RL Benchmark in practice. To the best of our knowledge, Open RL Benchmark is the first RL benchmark of its kind, and the authors hope that it will improve and facilitate the work of researchers in the field.
Fast Inference and Transfer of Compositional Task Structures for Few-shot Task Generalization
May 25, 2022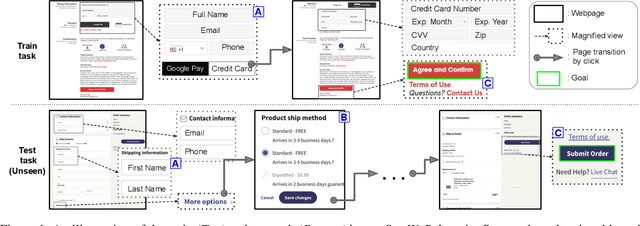
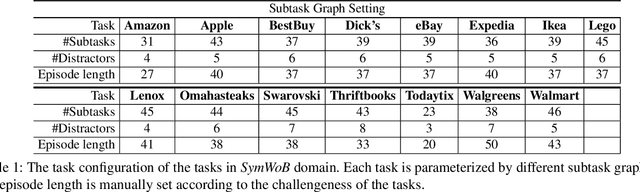
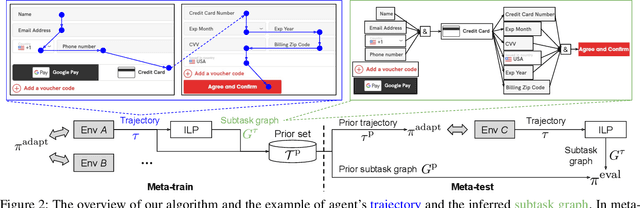

We tackle real-world problems with complex structures beyond the pixel-based game or simulator. We formulate it as a few-shot reinforcement learning problem where a task is characterized by a subtask graph that defines a set of subtasks and their dependencies that are unknown to the agent. Different from the previous meta-rl methods trying to directly infer the unstructured task embedding, our multi-task subtask graph inferencer (MTSGI) first infers the common high-level task structure in terms of the subtask graph from the training tasks, and use it as a prior to improve the task inference in testing. Our experiment results on 2D grid-world and complex web navigation domains show that the proposed method can learn and leverage the common underlying structure of the tasks for faster adaptation to the unseen tasks than various existing algorithms such as meta reinforcement learning, hierarchical reinforcement learning, and other heuristic agents.
Lipschitz-constrained Unsupervised Skill Discovery
Feb 08, 2022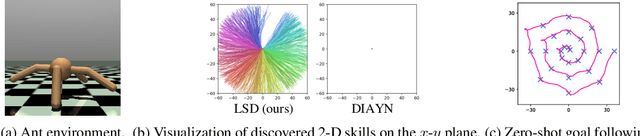
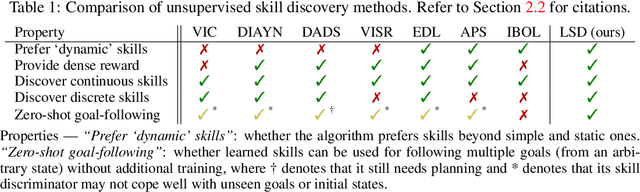
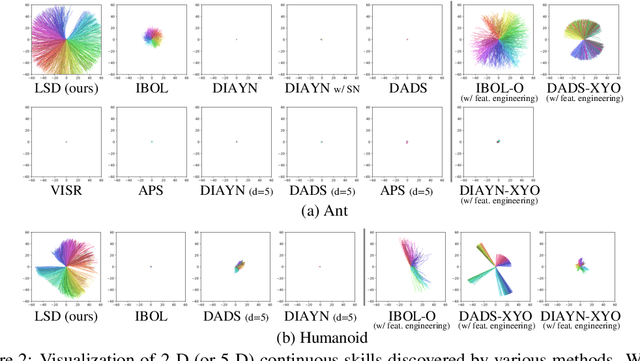
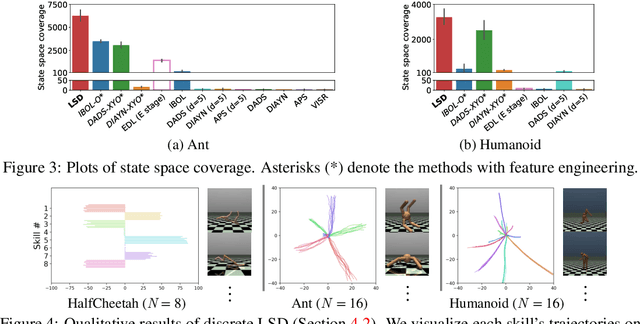
We study the problem of unsupervised skill discovery, whose goal is to learn a set of diverse and useful skills with no external reward. There have been a number of skill discovery methods based on maximizing the mutual information (MI) between skills and states. However, we point out that their MI objectives usually prefer static skills to dynamic ones, which may hinder the application for downstream tasks. To address this issue, we propose Lipschitz-constrained Skill Discovery (LSD), which encourages the agent to discover more diverse, dynamic, and far-reaching skills. Another benefit of LSD is that its learned representation function can be utilized for solving goal-following downstream tasks even in a zero-shot manner - i.e., without further training or complex planning. Through experiments on various MuJoCo robotic locomotion and manipulation environments, we demonstrate that LSD outperforms previous approaches in terms of skill diversity, state space coverage, and performance on seven downstream tasks including the challenging task of following multiple goals on Humanoid. Our code and videos are available at https://shpark.me/projects/lsd/.
Environment Generation for Zero-Shot Compositional Reinforcement Learning
Jan 21, 2022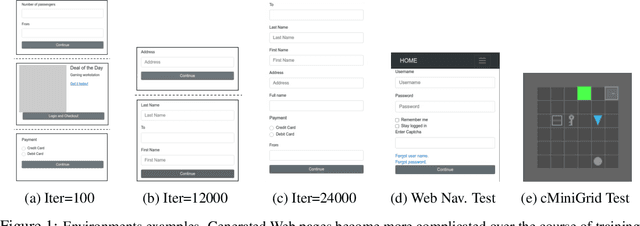
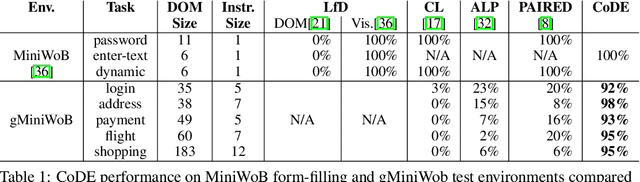

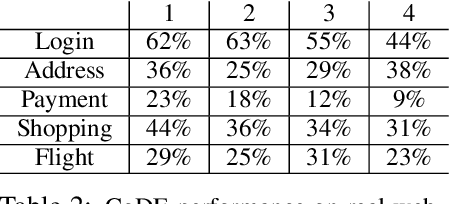
Many real-world problems are compositional - solving them requires completing interdependent sub-tasks, either in series or in parallel, that can be represented as a dependency graph. Deep reinforcement learning (RL) agents often struggle to learn such complex tasks due to the long time horizons and sparse rewards. To address this problem, we present Compositional Design of Environments (CoDE), which trains a Generator agent to automatically build a series of compositional tasks tailored to the RL agent's current skill level. This automatic curriculum not only enables the agent to learn more complex tasks than it could have otherwise, but also selects tasks where the agent's performance is weak, enhancing its robustness and ability to generalize zero-shot to unseen tasks at test-time. We analyze why current environment generation techniques are insufficient for the problem of generating compositional tasks, and propose a new algorithm that addresses these issues. Our results assess learning and generalization across multiple compositional tasks, including the real-world problem of learning to navigate and interact with web pages. We learn to generate environments composed of multiple pages or rooms, and train RL agents capable of completing wide-range of complex tasks in those environments. We contribute two new benchmark frameworks for generating compositional tasks, compositional MiniGrid and gMiniWoB for web navigation.CoDE yields 4x higher success rate than the strongest baseline, and demonstrates strong performance of real websites learned on 3500 primitive tasks.
Successor Feature Landmarks for Long-Horizon Goal-Conditioned Reinforcement Learning
Nov 18, 2021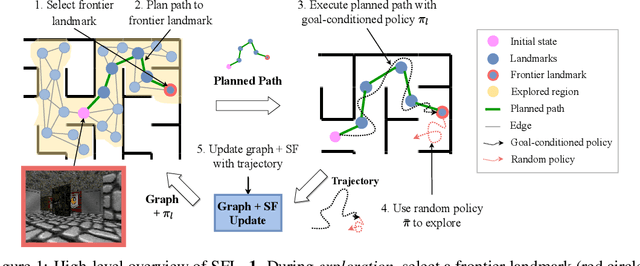
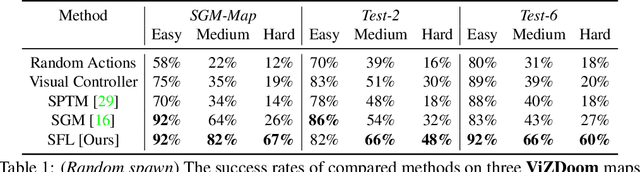
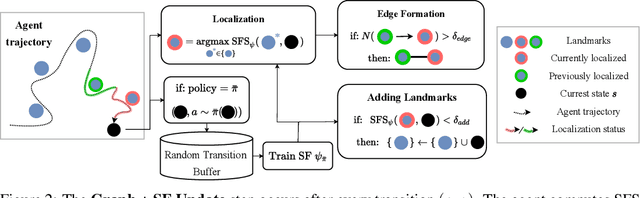
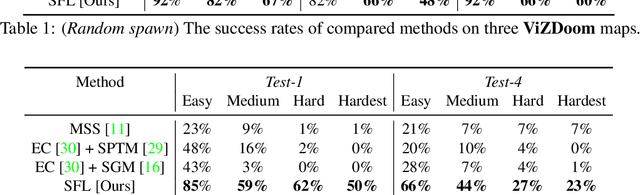
Operating in the real-world often requires agents to learn about a complex environment and apply this understanding to achieve a breadth of goals. This problem, known as goal-conditioned reinforcement learning (GCRL), becomes especially challenging for long-horizon goals. Current methods have tackled this problem by augmenting goal-conditioned policies with graph-based planning algorithms. However, they struggle to scale to large, high-dimensional state spaces and assume access to exploration mechanisms for efficiently collecting training data. In this work, we introduce Successor Feature Landmarks (SFL), a framework for exploring large, high-dimensional environments so as to obtain a policy that is proficient for any goal. SFL leverages the ability of successor features (SF) to capture transition dynamics, using it to drive exploration by estimating state-novelty and to enable high-level planning by abstracting the state-space as a non-parametric landmark-based graph. We further exploit SF to directly compute a goal-conditioned policy for inter-landmark traversal, which we use to execute plans to "frontier" landmarks at the edge of the explored state space. We show in our experiments on MiniGrid and ViZDoom that SFL enables efficient exploration of large, high-dimensional state spaces and outperforms state-of-the-art baselines on long-horizon GCRL tasks.
Shortest-Path Constrained Reinforcement Learning for Sparse Reward Tasks
Jul 13, 2021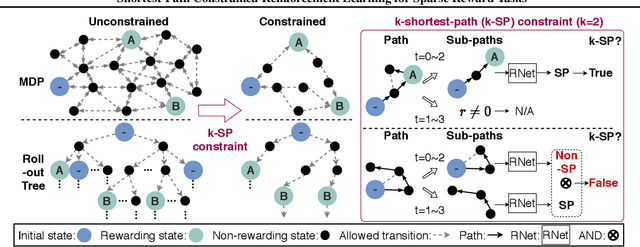
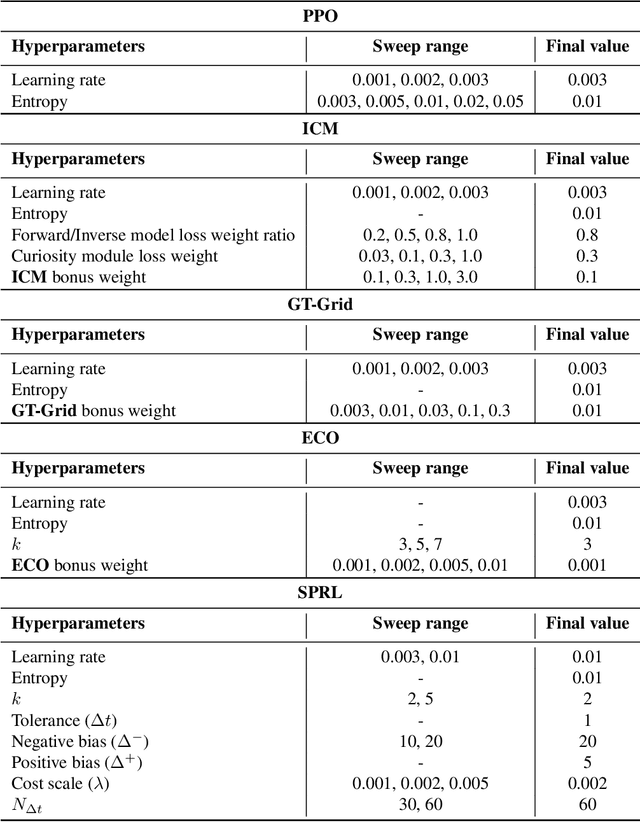
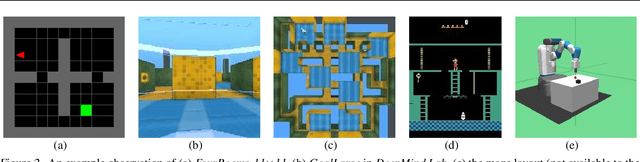
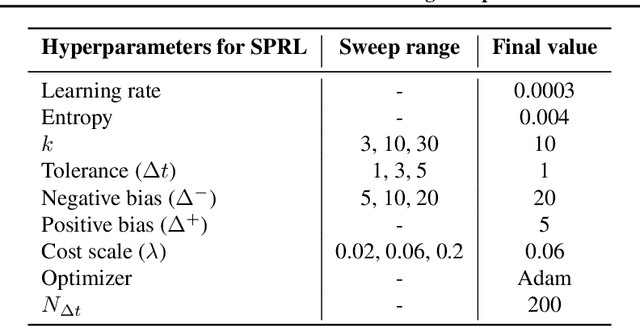
We propose the k-Shortest-Path (k-SP) constraint: a novel constraint on the agent's trajectory that improves the sample efficiency in sparse-reward MDPs. We show that any optimal policy necessarily satisfies the k-SP constraint. Notably, the k-SP constraint prevents the policy from exploring state-action pairs along the non-k-SP trajectories (e.g., going back and forth). However, in practice, excluding state-action pairs may hinder the convergence of RL algorithms. To overcome this, we propose a novel cost function that penalizes the policy violating SP constraint, instead of completely excluding it. Our numerical experiment in a tabular RL setting demonstrates that the SP constraint can significantly reduce the trajectory space of policy. As a result, our constraint enables more sample efficient learning by suppressing redundant exploration and exploitation. Our experiments on MiniGrid, DeepMind Lab, Atari, and Fetch show that the proposed method significantly improves proximal policy optimization (PPO) and outperforms existing novelty-seeking exploration methods including count-based exploration even in continuous control tasks, indicating that it improves the sample efficiency by preventing the agent from taking redundant actions.