 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Control: Adjoint Learning Through Equilibrium Constraints
May 05, 2026Many physical AI tasks are governed by implicit equilibrium: an agent actuates a subset of degrees of freedom (boundary DoFs), while the remaining free DoFs settle by minimizing a total potential energy. Even seemingly basic tasks such as bending a deformable linear object (DLO) to a target shape can exhibit strongly nonlinear behavior due to multi-stability: the same boundary conditions may yield multiple equilibrium shapes depending on the actuation trajectory. However, learning and control in such systems is brittle because the actuation-to-configuration map is defined only implicitly, and naive backpropagation through iterative equilibrium solvers is memory- and compute-intensive. We propose Neural Control, a boundary-control framework that computes trajectory-dependent, memory-efficient proxy gradients by differentiating equilibrium conditions via an adjoint formulation, avoiding unrolling of solver iterations. To improve robustness over long horizons, we integrate these sensitivities into a receding-horizon MPC scheme that repeatedly re-anchors optimization to realized equilibria and mitigates basin-switching in multi-stable regimes. We evaluate Neural Control in simulation and on physical robots manipulating DLOs, and show improved performance over gradient-free baselines such as SPSA and CEM.
Towards Closed-Loop Embodied Empathy Evolution: Probing LLM-Centric Lifelong Empathic Motion Generation in Unseen Scenarios
Dec 22, 2025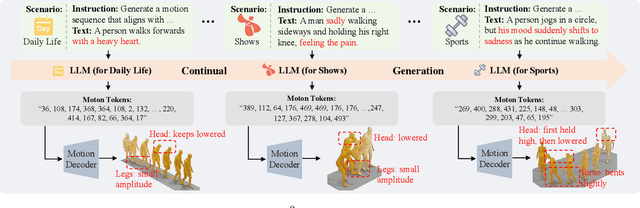

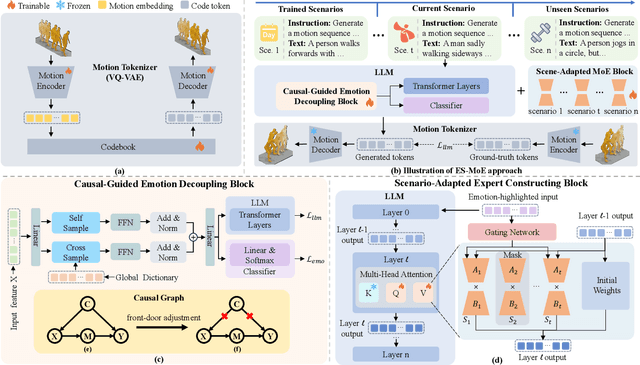
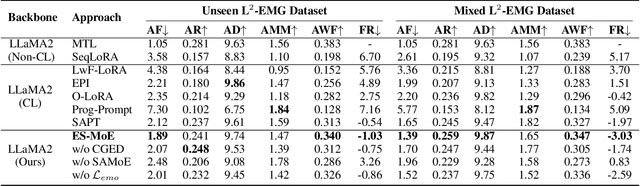
In the literature, existing human-centric emotional motion generation methods primarily focus on boosting performance within a single scale-fixed dataset, largely neglecting the flexible and scale-increasing motion scenarios (e.g., sports, dance), whereas effectively learning these newly emerging scenarios can significantly enhance the model's real-world generalization ability. Inspired by this, this paper proposes a new LLM-Centric Lifelong Empathic Motion Generation (L^2-EMG) task, which aims to equip LLMs with the capability to continually acquire emotional motion generation knowledge across different unseen scenarios, potentially contributing to building a closed-loop and self-evolving embodied agent equipped with both empathy and intelligence. Further, this paper poses two key challenges in the L^2-EMG task, i.e., the emotion decoupling challenge and the scenario adapting challenge. To this end, this paper proposes an Emotion-Transferable and Scenario-Adapted Mixture of Experts (ES-MoE) approach which designs a causal-guided emotion decoupling block and a scenario-adapted expert constructing block to address the two challenges, respectively. Especially, this paper constructs multiple L^2-EMG datasets to validate the effectiveness of the ES-MoE approach. Extensive evaluations show that ES-MoE outperforms advanced baselines.
Dual form Complementary Masking for Domain-Adaptive Image Segmentation
Jul 16, 2025Recent works have correlated Masked Image Modeling (MIM) with consistency regularization in Unsupervised Domain Adaptation (UDA). However, they merely treat masking as a special form of deformation on the input images and neglect the theoretical analysis, which leads to a superficial understanding of masked reconstruction and insufficient exploitation of its potential in enhancing feature extraction and representation learning. In this paper, we reframe masked reconstruction as a sparse signal reconstruction problem and theoretically prove that the dual form of complementary masks possesses superior capabilities in extracting domain-agnostic image features. Based on this compelling insight, we propose MaskTwins, a simple yet effective UDA framework that integrates masked reconstruction directly into the main training pipeline. MaskTwins uncovers intrinsic structural patterns that persist across disparate domains by enforcing consistency between predictions of images masked in complementary ways, enabling domain generalization in an end-to-end manner. Extensive experiments verify the superiority of MaskTwins over baseline methods in natural and biological image segmentation. These results demonstrate the significant advantages of MaskTwins in extracting domain-invariant features without the need for separate pre-training, offering a new paradigm for domain-adaptive segmentation.
MLLMs are Deeply Affected by Modality Bias
May 24, 2025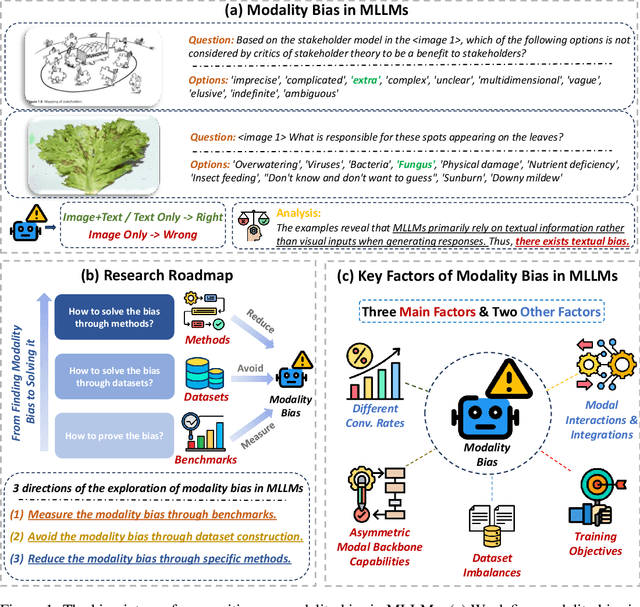
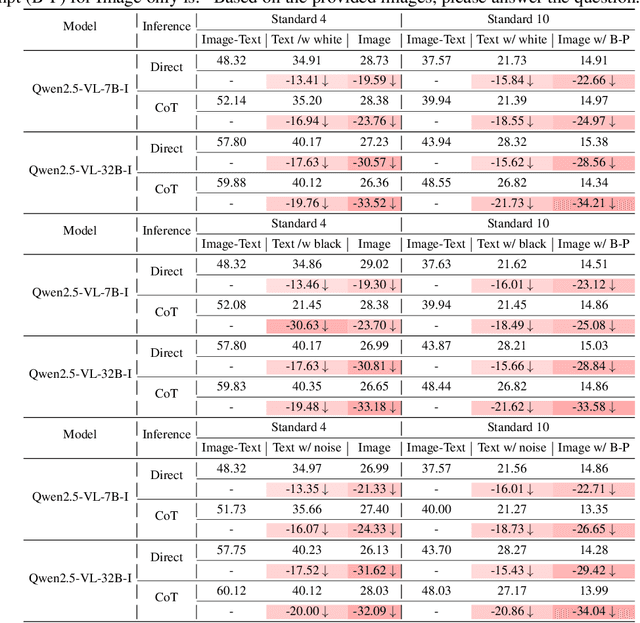
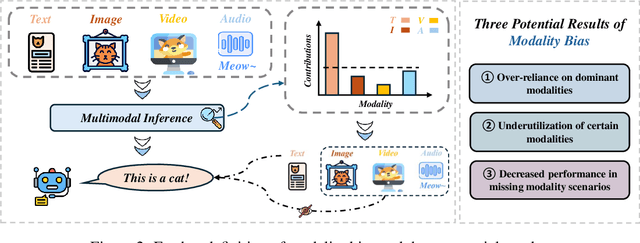
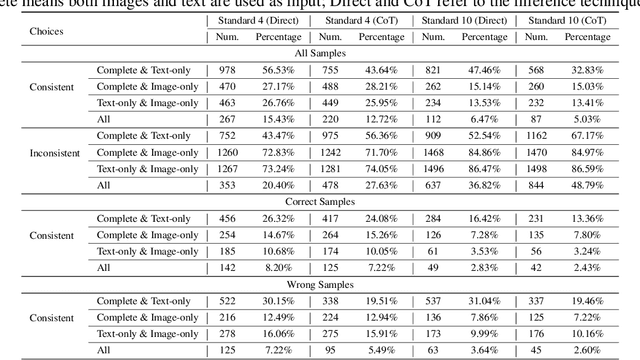
Recent advances in Multimodal Large Language Models (MLLMs) have shown promising results in integrating diverse modalities such as texts and images. MLLMs are heavily influenced by modality bias, often relying on language while under-utilizing other modalities like visual inputs. This position paper argues that MLLMs are deeply affected by modality bias. Firstly, we diagnose the current state of modality bias, highlighting its manifestations across various tasks. Secondly, we propose a systematic research road-map related to modality bias in MLLMs. Thirdly, we identify key factors of modality bias in MLLMs and offer actionable suggestions for future research to mitigate it. To substantiate these findings, we conduct experiments that demonstrate the influence of each factor: 1. Data Characteristics: Language data is compact and abstract, while visual data is redundant and complex, creating an inherent imbalance in learning dynamics. 2. Imbalanced Backbone Capabilities: The dominance of pretrained language models in MLLMs leads to overreliance on language and neglect of visual information. 3. Training Objectives: Current objectives often fail to promote balanced cross-modal alignment, resulting in shortcut learning biased toward language. These findings highlight the need for balanced training strategies and model architectures to better integrate multiple modalities in MLLMs. We call for interdisciplinary efforts to tackle these challenges and drive innovation in MLLM research. Our work provides a fresh perspective on modality bias in MLLMs and offers insights for developing more robust and generalizable multimodal systems-advancing progress toward Artificial General Intelligence.
Is Your Prompt Safe? Investigating Prompt Injection Attacks Against Open-Source LLMs
May 20, 2025
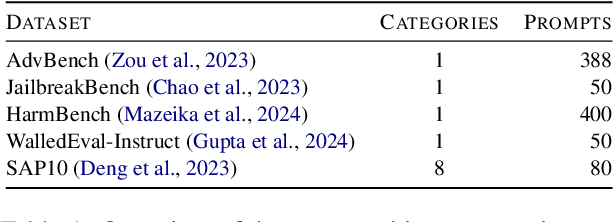

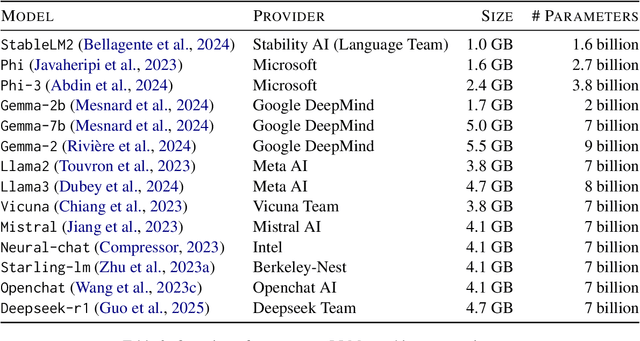
Recent studies demonstrate that Large Language Models (LLMs) are vulnerable to different prompt-based attacks, generating harmful content or sensitive information. Both closed-source and open-source LLMs are underinvestigated for these attacks. This paper studies effective prompt injection attacks against the $\mathbf{14}$ most popular open-source LLMs on five attack benchmarks. Current metrics only consider successful attacks, whereas our proposed Attack Success Probability (ASP) also captures uncertainty in the model's response, reflecting ambiguity in attack feasibility. By comprehensively analyzing the effectiveness of prompt injection attacks, we propose a simple and effective hypnotism attack; results show that this attack causes aligned language models, including Stablelm2, Mistral, Openchat, and Vicuna, to generate objectionable behaviors, achieving around $90$% ASP. They also indicate that our ignore prefix attacks can break all $\mathbf{14}$ open-source LLMs, achieving over $60$% ASP on a multi-categorical dataset. We find that moderately well-known LLMs exhibit higher vulnerability to prompt injection attacks, highlighting the need to raise public awareness and prioritize efficient mitigation strategies.
Toward Super Agent System with Hybrid AI Routers
Apr 11, 2025AI Agents powered by Large Language Models are transforming the world through enormous applications. A super agent has the potential to fulfill diverse user needs, such as summarization, coding, and research, by accurately understanding user intent and leveraging the appropriate tools to solve tasks. However, to make such an agent viable for real-world deployment and accessible at scale, significant optimizations are required to ensure high efficiency and low cost. This paper presents a design of the Super Agent System. Upon receiving a user prompt, the system first detects the intent of the user, then routes the request to specialized task agents with the necessary tools or automatically generates agentic workflows. In practice, most applications directly serve as AI assistants on edge devices such as phones and robots. As different language models vary in capability and cloud-based models often entail high computational costs, latency, and privacy concerns, we then explore the hybrid mode where the router dynamically selects between local and cloud models based on task complexity. Finally, we introduce the blueprint of an on-device super agent enhanced with cloud. With advances in multi-modality models and edge hardware, we envision that most computations can be handled locally, with cloud collaboration only as needed. Such architecture paves the way for super agents to be seamlessly integrated into everyday life in the near future.
MemorySAM: Memorize Modalities and Semantics with Segment Anything Model 2 for Multi-modal Semantic Segmentation
Mar 09, 2025Research has focused on Multi-Modal Semantic Segmentation (MMSS), where pixel-wise predictions are derived from multiple visual modalities captured by diverse sensors. Recently, the large vision model, Segment Anything Model 2 (SAM2), has shown strong zero-shot segmentation performance on both images and videos. When extending SAM2 to MMSS, two issues arise: 1. How can SAM2 be adapted to multi-modal data? 2. How can SAM2 better understand semantics? Inspired by cross-frame correlation in videos, we propose to treat multi-modal data as a sequence of frames representing the same scene. Our key idea is to ''memorize'' the modality-agnostic information and 'memorize' the semantics related to the targeted scene. To achieve this, we apply SAM2's memory mechanisms across multi-modal data to capture modality-agnostic features. Meanwhile, to memorize the semantic knowledge, we propose a training-only Semantic Prototype Memory Module (SPMM) to store category-level prototypes across training for facilitating SAM2's transition from instance to semantic segmentation. A prototypical adaptation loss is imposed between global and local prototypes iteratively to align and refine SAM2's semantic understanding. Extensive experimental results demonstrate that our proposed MemorySAM outperforms SoTA methods by large margins on both synthetic and real-world benchmarks (65.38% on DELIVER, 52.88% on MCubeS). Source code will be made publicly available.
Backdoor Attacks on Discrete Graph Diffusion Models
Mar 08, 2025Diffusion models are powerful generative models in continuous data domains such as image and video data. Discrete graph diffusion models (DGDMs) have recently extended them for graph generation, which are crucial in fields like molecule and protein modeling, and obtained the SOTA performance. However, it is risky to deploy DGDMs for safety-critical applications (e.g., drug discovery) without understanding their security vulnerabilities. In this work, we perform the first study on graph diffusion models against backdoor attacks, a severe attack that manipulates both the training and inference/generation phases in graph diffusion models. We first define the threat model, under which we design the attack such that the backdoored graph diffusion model can generate 1) high-quality graphs without backdoor activation, 2) effective, stealthy, and persistent backdoored graphs with backdoor activation, and 3) graphs that are permutation invariant and exchangeable--two core properties in graph generative models. 1) and 2) are validated via empirical evaluations without and with backdoor defenses, while 3) is validated via theoretical results.
MultiClimate: Multimodal Stance Detection on Climate Change Videos
Sep 26, 2024Climate change (CC) has attracted increasing attention in NLP in recent years. However, detecting the stance on CC in multimodal data is understudied and remains challenging due to a lack of reliable datasets. To improve the understanding of public opinions and communication strategies, this paper presents MultiClimate, the first open-source manually-annotated stance detection dataset with $100$ CC-related YouTube videos and $4,209$ frame-transcript pairs. We deploy state-of-the-art vision and language models, as well as multimodal models for MultiClimate stance detection. Results show that text-only BERT significantly outperforms image-only ResNet50 and ViT. Combining both modalities achieves state-of-the-art, $0.747$/$0.749$ in accuracy/F1. Our 100M-sized fusion models also beat CLIP and BLIP, as well as the much larger 9B-sized multimodal IDEFICS and text-only Llama3 and Gemma2, indicating that multimodal stance detection remains challenging for large language models. Our code, dataset, as well as supplementary materials, are available at https://github.com/werywjw/MultiClimate.
GauTOAO: Gaussian-based Task-Oriented Affordance of Objects
Sep 18, 2024When your robot grasps an object using dexterous hands or grippers, it should understand the Task-Oriented Affordances of the Object(TOAO), as different tasks often require attention to specific parts of the object. To address this challenge, we propose GauTOAO, a Gaussian-based framework for Task-Oriented Affordance of Objects, which leverages vision-language models in a zero-shot manner to predict affordance-relevant regions of an object, given a natural language query. Our approach introduces a new paradigm: "static camera, moving object," allowing the robot to better observe and understand the object in hand during manipulation. GauTOAO addresses the limitations of existing methods, which often lack effective spatial grouping, by extracting a comprehensive 3D object mask using DINO features. This mask is then used to conditionally query gaussians, producing a refined semantic distribution over the object for the specified task. This approach results in more accurate TOAO extraction, enhancing the robot's understanding of the object and improving task performance. We validate the effectiveness of GauTOAO through real-world experiments, demonstrating its capability to generalize across various tasks.