 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShow, Don't Tell: Morphing Latent Reasoning into Image Generation
Feb 02, 2026Text-to-image (T2I) generation has achieved remarkable progress, yet existing methods often lack the ability to dynamically reason and refine during generation--a hallmark of human creativity. Current reasoning-augmented paradigms most rely on explicit thought processes, where intermediate reasoning is decoded into discrete text at fixed steps with frequent image decoding and re-encoding, leading to inefficiencies, information loss, and cognitive mismatches. To bridge this gap, we introduce LatentMorph, a novel framework that seamlessly integrates implicit latent reasoning into the T2I generation process. At its core, LatentMorph introduces four lightweight components: (i) a condenser for summarizing intermediate generation states into compact visual memory, (ii) a translator for converting latent thoughts into actionable guidance, (iii) a shaper for dynamically steering next image token predictions, and (iv) an RL-trained invoker for adaptively determining when to invoke reasoning. By performing reasoning entirely in continuous latent spaces, LatentMorph avoids the bottlenecks of explicit reasoning and enables more adaptive self-refinement. Extensive experiments demonstrate that LatentMorph (I) enhances the base model Janus-Pro by $16\%$ on GenEval and $25\%$ on T2I-CompBench; (II) outperforms explicit paradigms (e.g., TwiG) by $15\%$ and $11\%$ on abstract reasoning tasks like WISE and IPV-Txt, (III) while reducing inference time by $44\%$ and token consumption by $51\%$; and (IV) exhibits $71\%$ cognitive alignment with human intuition on reasoning invocation.
A4-Agent: An Agentic Framework for Zero-Shot Affordance Reasoning
Dec 16, 2025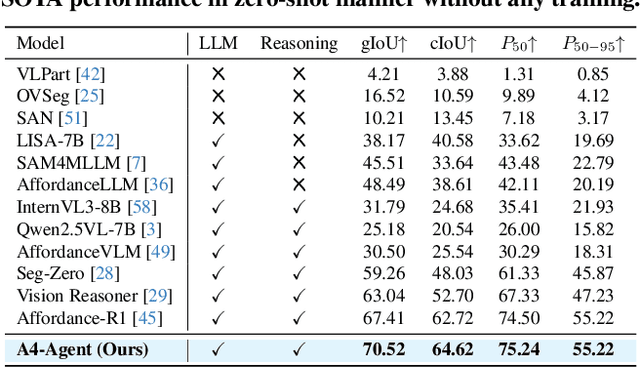
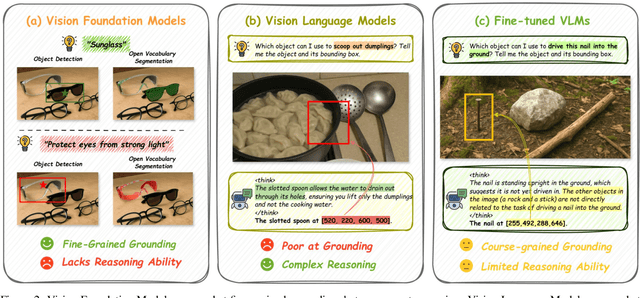
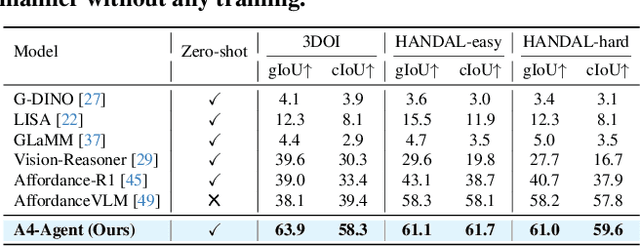
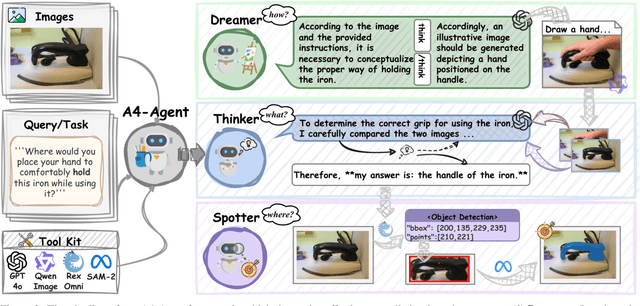
Affordance prediction, which identifies interaction regions on objects based on language instructions, is critical for embodied AI. Prevailing end-to-end models couple high-level reasoning and low-level grounding into a single monolithic pipeline and rely on training over annotated datasets, which leads to poor generalization on novel objects and unseen environments. In this paper, we move beyond this paradigm by proposing A4-Agent, a training-free agentic framework that decouples affordance prediction into a three-stage pipeline. Our framework coordinates specialized foundation models at test time: (1) a $\textbf{Dreamer}$ that employs generative models to visualize $\textit{how}$ an interaction would look; (2) a $\textbf{Thinker}$ that utilizes large vision-language models to decide $\textit{what}$ object part to interact with; and (3) a $\textbf{Spotter}$ that orchestrates vision foundation models to precisely locate $\textit{where}$ the interaction area is. By leveraging the complementary strengths of pre-trained models without any task-specific fine-tuning, our zero-shot framework significantly outperforms state-of-the-art supervised methods across multiple benchmarks and demonstrates robust generalization to real-world settings.
Multimodal Spatial Reasoning in the Large Model Era: A Survey and Benchmarks
Oct 29, 2025Humans possess spatial reasoning abilities that enable them to understand spaces through multimodal observations, such as vision and sound. Large multimodal reasoning models extend these abilities by learning to perceive and reason, showing promising performance across diverse spatial tasks. However, systematic reviews and publicly available benchmarks for these models remain limited. In this survey, we provide a comprehensive review of multimodal spatial reasoning tasks with large models, categorizing recent progress in multimodal large language models (MLLMs) and introducing open benchmarks for evaluation. We begin by outlining general spatial reasoning, focusing on post-training techniques, explainability, and architecture. Beyond classical 2D tasks, we examine spatial relationship reasoning, scene and layout understanding, as well as visual question answering and grounding in 3D space. We also review advances in embodied AI, including vision-language navigation and action models. Additionally, we consider emerging modalities such as audio and egocentric video, which contribute to novel spatial understanding through new sensors. We believe this survey establishes a solid foundation and offers insights into the growing field of multimodal spatial reasoning. Updated information about this survey, codes and implementation of the open benchmarks can be found at https://github.com/zhengxuJosh/Awesome-Spatial-Reasoning.
AI for Service: Proactive Assistance with AI Glasses
Oct 16, 2025In an era where AI is evolving from a passive tool into an active and adaptive companion, we introduce AI for Service (AI4Service), a new paradigm that enables proactive and real-time assistance in daily life. Existing AI services remain largely reactive, responding only to explicit user commands. We argue that a truly intelligent and helpful assistant should be capable of anticipating user needs and taking actions proactively when appropriate. To realize this vision, we propose Alpha-Service, a unified framework that addresses two fundamental challenges: Know When to intervene by detecting service opportunities from egocentric video streams, and Know How to provide both generalized and personalized services. Inspired by the von Neumann computer architecture and based on AI glasses, Alpha-Service consists of five key components: an Input Unit for perception, a Central Processing Unit for task scheduling, an Arithmetic Logic Unit for tool utilization, a Memory Unit for long-term personalization, and an Output Unit for natural human interaction. As an initial exploration, we implement Alpha-Service through a multi-agent system deployed on AI glasses. Case studies, including a real-time Blackjack advisor, a museum tour guide, and a shopping fit assistant, demonstrate its ability to seamlessly perceive the environment, infer user intent, and provide timely and useful assistance without explicit prompts.
Are We Using the Right Benchmark: An Evaluation Framework for Visual Token Compression Methods
Oct 08, 2025Recent endeavors to accelerate inference in Multimodal Large Language Models (MLLMs) have primarily focused on visual token compression. The effectiveness of these methods is typically assessed by measuring the accuracy drop on established benchmarks, comparing model performance before and after compression. However, these benchmarks are originally designed to assess the perception and reasoning capabilities of MLLMs, rather than to evaluate compression techniques. As a result, directly applying them to visual token compression introduces a task mismatch. Strikingly, our investigation reveals that simple image downsampling consistently outperforms many advanced compression methods across multiple widely used benchmarks. Through extensive experiments, we make the following observations: (i) Current benchmarks are noisy for the visual token compression task. (ii) Down-sampling is able to serve as a data filter to evaluate the difficulty of samples in the visual token compression task. Motivated by these findings, we introduce VTC-Bench, an evaluation framework that incorporates a data filtering mechanism to denoise existing benchmarks, thereby enabling fairer and more accurate assessment of visual token compression methods. All data and code are available at https://github.com/Chenfei-Liao/VTC-Bench.
PANORAMA: The Rise of Omnidirectional Vision in the Embodied AI Era
Sep 16, 2025Omnidirectional vision, using 360-degree vision to understand the environment, has become increasingly critical across domains like robotics, industrial inspection, and environmental monitoring. Compared to traditional pinhole vision, omnidirectional vision provides holistic environmental awareness, significantly enhancing the completeness of scene perception and the reliability of decision-making. However, foundational research in this area has historically lagged behind traditional pinhole vision. This talk presents an emerging trend in the embodied AI era: the rapid development of omnidirectional vision, driven by growing industrial demand and academic interest. We highlight recent breakthroughs in omnidirectional generation, omnidirectional perception, omnidirectional understanding, and related datasets. Drawing on insights from both academia and industry, we propose an ideal panoramic system architecture in the embodied AI era, PANORAMA, which consists of four key subsystems. Moreover, we offer in-depth opinions related to emerging trends and cross-community impacts at the intersection of panoramic vision and embodied AI, along with the future roadmap and open challenges. This overview synthesizes state-of-the-art advancements and outlines challenges and opportunities for future research in building robust, general-purpose omnidirectional AI systems in the embodied AI era.
Shifting AI Efficiency From Model-Centric to Data-Centric Compression
May 25, 2025The rapid advancement of large language models (LLMs) and multi-modal LLMs (MLLMs) has historically relied on model-centric scaling through increasing parameter counts from millions to hundreds of billions to drive performance gains. However, as we approach hardware limits on model size, the dominant computational bottleneck has fundamentally shifted to the quadratic cost of self-attention over long token sequences, now driven by ultra-long text contexts, high-resolution images, and extended videos. In this position paper, \textbf{we argue that the focus of research for efficient AI is shifting from model-centric compression to data-centric compression}. We position token compression as the new frontier, which improves AI efficiency via reducing the number of tokens during model training or inference. Through comprehensive analysis, we first examine recent developments in long-context AI across various domains and establish a unified mathematical framework for existing model efficiency strategies, demonstrating why token compression represents a crucial paradigm shift in addressing long-context overhead. Subsequently, we systematically review the research landscape of token compression, analyzing its fundamental benefits and identifying its compelling advantages across diverse scenarios. Furthermore, we provide an in-depth analysis of current challenges in token compression research and outline promising future directions. Ultimately, our work aims to offer a fresh perspective on AI efficiency, synthesize existing research, and catalyze innovative developments to address the challenges that increasing context lengths pose to the AI community's advancement.
MLLMs are Deeply Affected by Modality Bias
May 24, 2025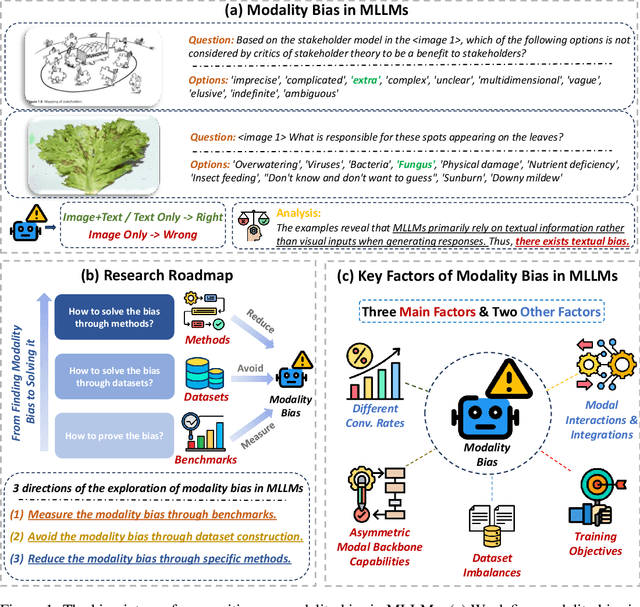
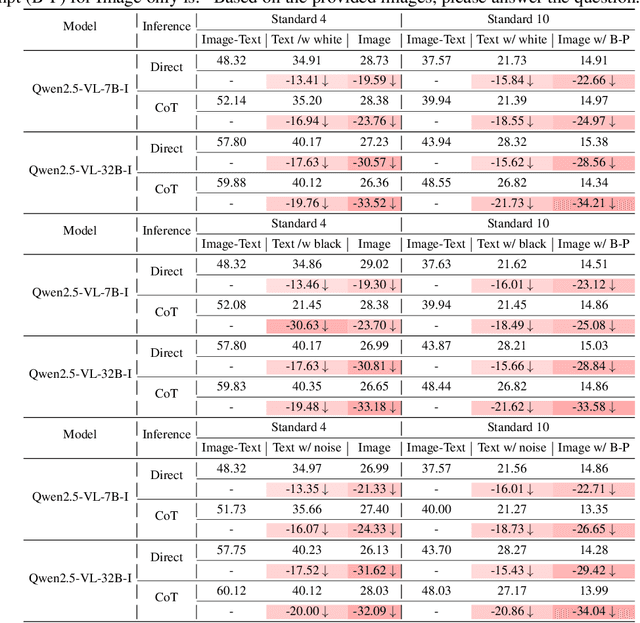
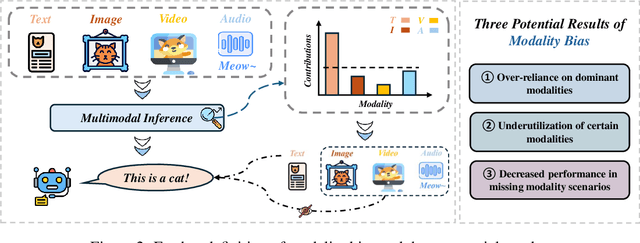
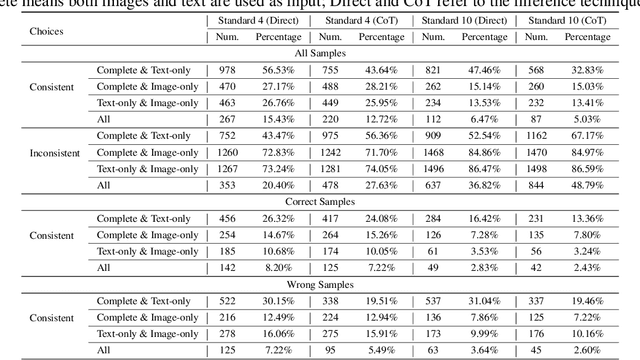
Recent advances in Multimodal Large Language Models (MLLMs) have shown promising results in integrating diverse modalities such as texts and images. MLLMs are heavily influenced by modality bias, often relying on language while under-utilizing other modalities like visual inputs. This position paper argues that MLLMs are deeply affected by modality bias. Firstly, we diagnose the current state of modality bias, highlighting its manifestations across various tasks. Secondly, we propose a systematic research road-map related to modality bias in MLLMs. Thirdly, we identify key factors of modality bias in MLLMs and offer actionable suggestions for future research to mitigate it. To substantiate these findings, we conduct experiments that demonstrate the influence of each factor: 1. Data Characteristics: Language data is compact and abstract, while visual data is redundant and complex, creating an inherent imbalance in learning dynamics. 2. Imbalanced Backbone Capabilities: The dominance of pretrained language models in MLLMs leads to overreliance on language and neglect of visual information. 3. Training Objectives: Current objectives often fail to promote balanced cross-modal alignment, resulting in shortcut learning biased toward language. These findings highlight the need for balanced training strategies and model architectures to better integrate multiple modalities in MLLMs. We call for interdisciplinary efforts to tackle these challenges and drive innovation in MLLM research. Our work provides a fresh perspective on modality bias in MLLMs and offers insights for developing more robust and generalizable multimodal systems-advancing progress toward Artificial General Intelligence.
OmniSAM: Omnidirectional Segment Anything Model for UDA in Panoramic Semantic Segmentation
Mar 10, 2025Segment Anything Model 2 (SAM2) has emerged as a strong base model in various pinhole imaging segmentation tasks. However, when applying it to $360^\circ$ domain, the significant field-of-view (FoV) gap between pinhole ($70^\circ \times 70^\circ$) and panoramic images ($180^\circ \times 360^\circ$) poses unique challenges. Two major concerns for this application includes 1) inevitable distortion and object deformation brought by the large FoV disparity between domains; 2) the lack of pixel-level semantic understanding that the original SAM2 cannot provide. To address these issues, we propose a novel OmniSAM framework, which makes the first attempt to apply SAM2 for panoramic semantic segmentation. Specifically, to bridge the first gap, OmniSAM first divides the panorama into sequences of patches. These patches are then treated as image sequences in similar manners as in video segmentation tasks. We then leverage the SAM2's memory mechanism to extract cross-patch correspondences that embeds the cross-FoV dependencies, improving feature continuity and the prediction consistency along mask boundaries. For the second gap, OmniSAM fine-tunes the pretrained image encoder and reutilize the mask decoder for semantic prediction. An FoV-based prototypical adaptation module with dynamic pseudo label update mechanism is also introduced to facilitate the alignment of memory and backbone features, thereby improving model generalization ability across different sizes of source models. Extensive experimental results demonstrate that OmniSAM outperforms the state-of-the-art methods by large margins, e.g., 79.06% (+10.22%) on SPin8-to-SPan8, 62.46% (+6.58%) on CS13-to-DP13.
MemorySAM: Memorize Modalities and Semantics with Segment Anything Model 2 for Multi-modal Semantic Segmentation
Mar 09, 2025Research has focused on Multi-Modal Semantic Segmentation (MMSS), where pixel-wise predictions are derived from multiple visual modalities captured by diverse sensors. Recently, the large vision model, Segment Anything Model 2 (SAM2), has shown strong zero-shot segmentation performance on both images and videos. When extending SAM2 to MMSS, two issues arise: 1. How can SAM2 be adapted to multi-modal data? 2. How can SAM2 better understand semantics? Inspired by cross-frame correlation in videos, we propose to treat multi-modal data as a sequence of frames representing the same scene. Our key idea is to ''memorize'' the modality-agnostic information and 'memorize' the semantics related to the targeted scene. To achieve this, we apply SAM2's memory mechanisms across multi-modal data to capture modality-agnostic features. Meanwhile, to memorize the semantic knowledge, we propose a training-only Semantic Prototype Memory Module (SPMM) to store category-level prototypes across training for facilitating SAM2's transition from instance to semantic segmentation. A prototypical adaptation loss is imposed between global and local prototypes iteratively to align and refine SAM2's semantic understanding. Extensive experimental results demonstrate that our proposed MemorySAM outperforms SoTA methods by large margins on both synthetic and real-world benchmarks (65.38% on DELIVER, 52.88% on MCubeS). Source code will be made publicly available.