 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Quality and Efficient Turbulence Mitigation with Events
Mar 21, 2026Turbulence mitigation (TM) is highly ill-posed due to the stochastic nature of atmospheric turbulence. Most methods rely on multiple frames recorded by conventional cameras to capture stable patterns in natural scenarios. However, they inevitably suffer from a trade-off between accuracy and efficiency: more frames enhance restoration at the cost of higher system latency and larger data overhead. Event cameras, equipped with microsecond temporal resolution and efficient sensing of dynamic changes, offer an opportunity to break the bottleneck. In this work, we present EHETM, a high-quality and efficient TM method inspired by the superiority of events to model motions in continuous sequences. We discover two key phenomena: (1) turbulence-induced events exhibit distinct polarity alternation correlated with sharp image gradients, providing structural cues for restoring scenes; and (2) dynamic objects form spatiotemporally coherent ``event tubes'' in contrast to irregular patterns within turbulent events, providing motion priors for disentangling objects from turbulence. Based on these insights, we design two complementary modules that respectively leverage polarity-weighted gradients for scene refinement and event-tube constraints for motion decoupling, achieving high-quality restoration with few frames. Furthermore, we construct two real-world event-frame turbulence datasets covering atmospheric and thermal cases. Experiments show that EHETM outperforms SOTA methods, especially under scenes with dynamic objects, while reducing data overhead and system latency by approximately 77.3% and 89.5%, respectively. Our code is available at: https://github.com/Xavier667/EHETM.
Efficient Tuning of Large Language Models for Knowledge-Grounded Dialogue Generation
Apr 10, 2025Large language models (LLMs) demonstrate remarkable text comprehension and generation capabilities but often lack the ability to utilize up-to-date or domain-specific knowledge not included in their training data. To address this gap, we introduce KEDiT, an efficient method for fine-tuning LLMs for knowledge-grounded dialogue generation. KEDiT operates in two main phases: first, it employs an information bottleneck to compress retrieved knowledge into learnable parameters, retaining essential information while minimizing computational overhead. Second, a lightweight knowledge-aware adapter integrates these compressed knowledge vectors into the LLM during fine-tuning, updating less than 2\% of the model parameters. The experimental results on the Wizard of Wikipedia and a newly constructed PubMed-Dialog dataset demonstrate that KEDiT excels in generating contextually relevant and informative responses, outperforming competitive baselines in automatic, LLM-based, and human evaluations. This approach effectively combines the strengths of pretrained LLMs with the adaptability needed for incorporating dynamic knowledge, presenting a scalable solution for fields such as medicine.
Oriented Tiny Object Detection: A Dataset, Benchmark, and Dynamic Unbiased Learning
Dec 16, 2024Detecting oriented tiny objects, which are limited in appearance information yet prevalent in real-world applications, remains an intricate and under-explored problem. To address this, we systemically introduce a new dataset, benchmark, and a dynamic coarse-to-fine learning scheme in this study. Our proposed dataset, AI-TOD-R, features the smallest object sizes among all oriented object detection datasets. Based on AI-TOD-R, we present a benchmark spanning a broad range of detection paradigms, including both fully-supervised and label-efficient approaches. Through investigation, we identify a learning bias presents across various learning pipelines: confident objects become increasingly confident, while vulnerable oriented tiny objects are further marginalized, hindering their detection performance. To mitigate this issue, we propose a Dynamic Coarse-to-Fine Learning (DCFL) scheme to achieve unbiased learning. DCFL dynamically updates prior positions to better align with the limited areas of oriented tiny objects, and it assigns samples in a way that balances both quantity and quality across different object shapes, thus mitigating biases in prior settings and sample selection. Extensive experiments across eight challenging object detection datasets demonstrate that DCFL achieves state-of-the-art accuracy, high efficiency, and remarkable versatility. The dataset, benchmark, and code are available at https://chasel-tsui.github.io/AI-TOD-R/.
A computational transition for detecting correlated stochastic block models by low-degree polynomials
Sep 02, 2024Detection of correlation in a pair of random graphs is a fundamental statistical and computational problem that has been extensively studied in recent years. In this work, we consider a pair of correlated (sparse) stochastic block models $\mathcal{S}(n,\tfrac{\lambda}{n};k,\epsilon;s)$ that are subsampled from a common parent stochastic block model $\mathcal S(n,\tfrac{\lambda}{n};k,\epsilon)$ with $k=O(1)$ symmetric communities, average degree $\lambda=O(1)$, divergence parameter $\epsilon$, and subsampling probability $s$. For the detection problem of distinguishing this model from a pair of independent Erd\H{o}s-R\'enyi graphs with the same edge density $\mathcal{G}(n,\tfrac{\lambda s}{n})$, we focus on tests based on \emph{low-degree polynomials} of the entries of the adjacency matrices, and we determine the threshold that separates the easy and hard regimes. More precisely, we show that this class of tests can distinguish these two models if and only if $s> \min \{ \sqrt{\alpha}, \frac{1}{\lambda \epsilon^2} \}$, where $\alpha\approx 0.338$ is the Otter's constant and $\frac{1}{\lambda \epsilon^2}$ is the Kesten-Stigum threshold. Our proof of low-degree hardness is based on a conditional variant of the low-degree likelihood calculation.
Goldfish: Vision-Language Understanding of Arbitrarily Long Videos
Jul 17, 2024Most current LLM-based models for video understanding can process videos within minutes. However, they struggle with lengthy videos due to challenges such as "noise and redundancy", as well as "memory and computation" constraints. In this paper, we present Goldfish, a methodology tailored for comprehending videos of arbitrary lengths. We also introduce the TVQA-long benchmark, specifically designed to evaluate models' capabilities in understanding long videos with questions in both vision and text content. Goldfish approaches these challenges with an efficient retrieval mechanism that initially gathers the top-k video clips relevant to the instruction before proceeding to provide the desired response. This design of the retrieval mechanism enables the Goldfish to efficiently process arbitrarily long video sequences, facilitating its application in contexts such as movies or television series. To facilitate the retrieval process, we developed MiniGPT4-Video that generates detailed descriptions for the video clips. In addressing the scarcity of benchmarks for long video evaluation, we adapted the TVQA short video benchmark for extended content analysis by aggregating questions from entire episodes, thereby shifting the evaluation from partial to full episode comprehension. We attained a 41.78% accuracy rate on the TVQA-long benchmark, surpassing previous methods by 14.94%. Our MiniGPT4-Video also shows exceptional performance in short video comprehension, exceeding existing state-of-the-art methods by 3.23%, 2.03%, 16.5% and 23.59% on the MSVD, MSRVTT, TGIF, and TVQA short video benchmarks, respectively. These results indicate that our models have significant improvements in both long and short-video understanding. Our models and code have been made publicly available at https://vision-cair.github.io/Goldfish_website/
InfiniBench: A Comprehensive Benchmark for Large Multimodal Models in Very Long Video Understanding
Jun 28, 2024Understanding long videos, ranging from tens of minutes to several hours, presents unique challenges in video comprehension. Despite the increasing importance of long-form video content, existing benchmarks primarily focus on shorter clips. To address this gap, we introduce InfiniBench a comprehensive benchmark for very long video understanding which presents 1)The longest video duration, averaging 76.34 minutes; 2) The largest number of question-answer pairs, 108.2K; 3) Diversity in questions that examine nine different skills and include both multiple-choice questions and open-ended questions; 4) Humancentric, as the video sources come from movies and daily TV shows, with specific human-level question designs such as Movie Spoiler Questions that require critical thinking and comprehensive understanding. Using InfiniBench, we comprehensively evaluate existing Large MultiModality Models (LMMs) on each skill, including the commercial model Gemini 1.5 Flash and the open-source models. The evaluation shows significant challenges in our benchmark.Our results show that the best AI models such Gemini struggles to perform well with 42.72% average accuracy and 2.71 out of 5 average score. We hope this benchmark will stimulate the LMMs community towards long video and human-level understanding. Our benchmark can be accessed at https://vision-cair.github.io/InfiniBench/
VRSBench: A Versatile Vision-Language Benchmark Dataset for Remote Sensing Image Understanding
Jun 18, 2024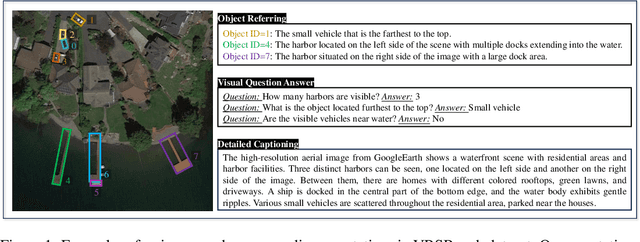
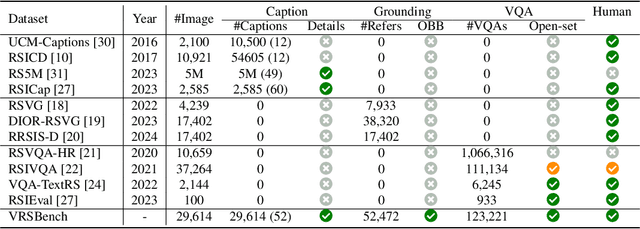
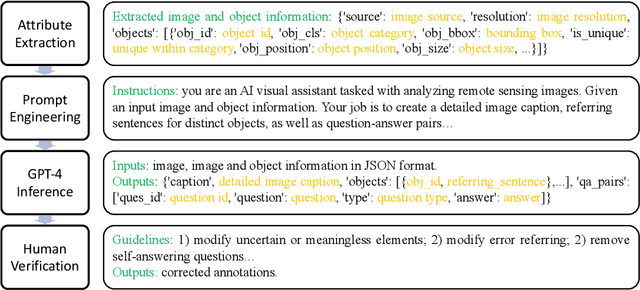
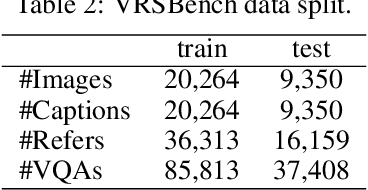
We introduce a new benchmark designed to advance the development of general-purpose, large-scale vision-language models for remote sensing images. Although several vision-language datasets in remote sensing have been proposed to pursue this goal, existing datasets are typically tailored to single tasks, lack detailed object information, or suffer from inadequate quality control. Exploring these improvement opportunities, we present a Versatile vision-language Benchmark for Remote Sensing image understanding, termed VRSBench. This benchmark comprises 29,614 images, with 29,614 human-verified detailed captions, 52,472 object references, and 123,221 question-answer pairs. It facilitates the training and evaluation of vision-language models across a broad spectrum of remote sensing image understanding tasks. We further evaluated state-of-the-art models on this benchmark for three vision-language tasks: image captioning, visual grounding, and visual question answering. Our work aims to significantly contribute to the development of advanced vision-language models in the field of remote sensing. The data and code can be accessed at https://github.com/lx709/VRSBench.
iMotion-LLM: Motion Prediction Instruction Tuning
Jun 11, 2024
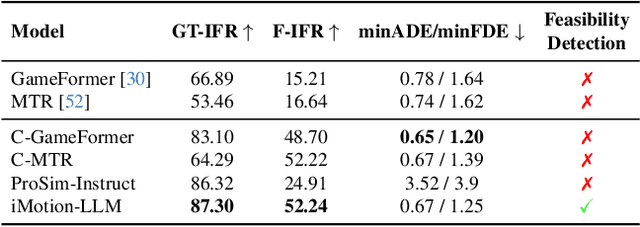
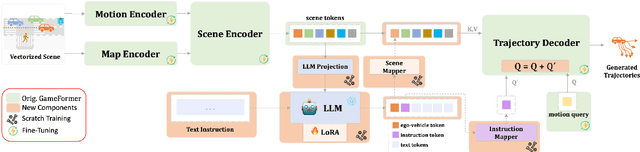
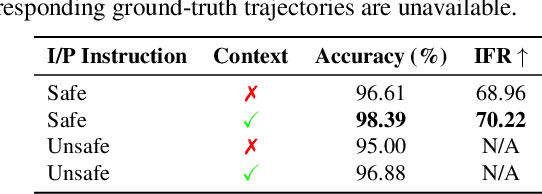
We introduce iMotion-LLM: a Multimodal Large Language Models (LLMs) with trajectory prediction, tailored to guide interactive multi-agent scenarios. Different from conventional motion prediction approaches, iMotion-LLM capitalizes on textual instructions as key inputs for generating contextually relevant trajectories. By enriching the real-world driving scenarios in the Waymo Open Dataset with textual motion instructions, we created InstructWaymo. Leveraging this dataset, iMotion-LLM integrates a pretrained LLM, fine-tuned with LoRA, to translate scene features into the LLM input space. iMotion-LLM offers significant advantages over conventional motion prediction models. First, it can generate trajectories that align with the provided instructions if it is a feasible direction. Second, when given an infeasible direction, it can reject the instruction, thereby enhancing safety. These findings act as milestones in empowering autonomous navigation systems to interpret and predict the dynamics of multi-agent environments, laying the groundwork for future advancements in this field.
Kestrel: Point Grounding Multimodal LLM for Part-Aware 3D Vision-Language Understanding
May 29, 2024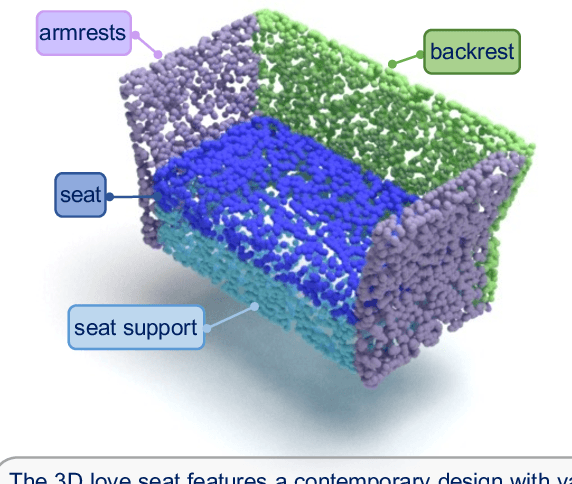
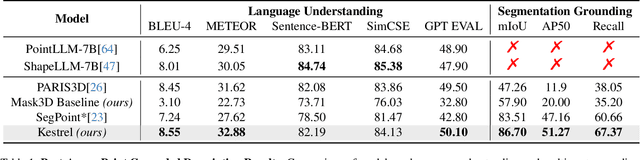
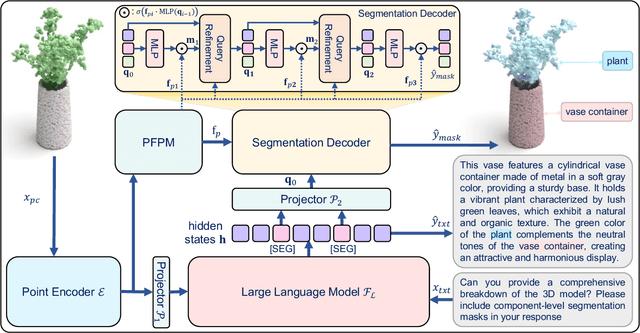
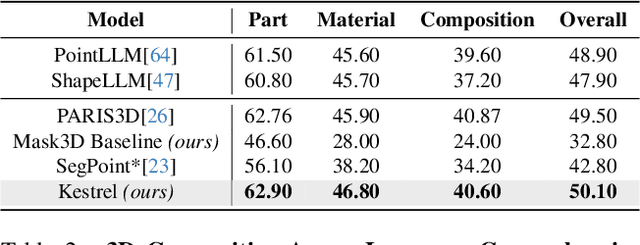
While 3D MLLMs have achieved significant progress, they are restricted to object and scene understanding and struggle to understand 3D spatial structures at the part level. In this paper, we introduce Kestrel, representing a novel approach that empowers 3D MLLMs with part-aware understanding, enabling better interpretation and segmentation grounding of 3D objects at the part level. Despite its significance, the current landscape lacks tasks and datasets that endow and assess this capability. Therefore, we propose two novel tasks: (1) Part-Aware Point Grounding, the model is tasked with directly predicting a part-level segmentation mask based on user instructions, and (2) Part-Aware Point Grounded Captioning, the model provides a detailed caption that includes part-level descriptions and their corresponding masks. To support learning and evaluating for these tasks, we introduce 3DCoMPaT Grounded Instructions Dataset (3DCoMPaT-GRIN). 3DCoMPaT-GRIN Vanilla, comprising 789k part-aware point cloud-instruction-segmentation mask triplets, is used to evaluate MLLMs' ability of part-aware segmentation grounding. 3DCoMPaT-GRIN Grounded Caption, containing 107k part-aware point cloud-instruction-grounded caption triplets, assesses both MLLMs' part-aware language comprehension and segmentation grounding capabilities. Our introduced tasks, dataset, and Kestrel represent a preliminary effort to bridge the gap between human cognition and 3D MLLMs, i.e., the ability to perceive and engage with the environment at both global and part levels. Extensive experiments on the 3DCoMPaT-GRIN show that Kestrel can generate user-specified segmentation masks, a capability not present in any existing 3D MLLM. Kestrel thus established a benchmark for evaluating the part-aware language comprehension and segmentation grounding of 3D objects. Project page at https://feielysia.github.io/Kestrel.github.io/
Distilling Implicit Multimodal Knowledge into LLMs for Zero-Resource Dialogue Generation
May 16, 2024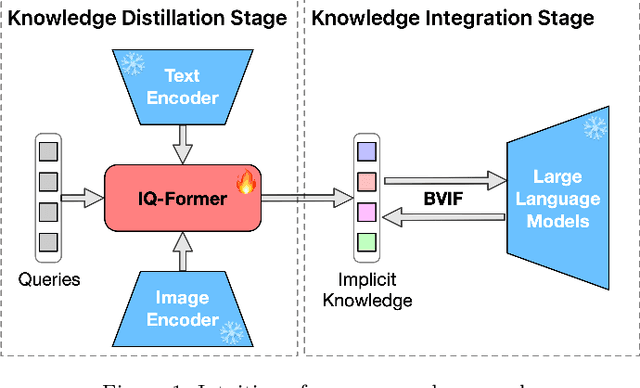
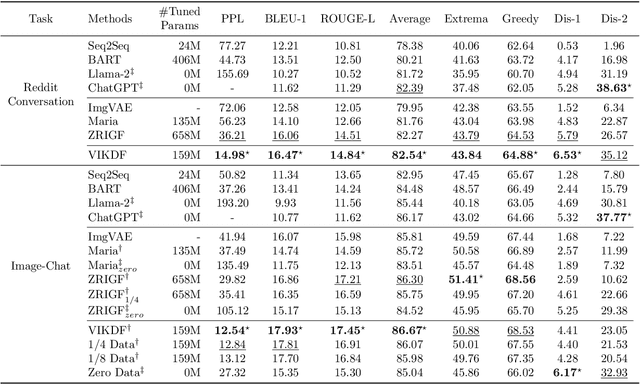
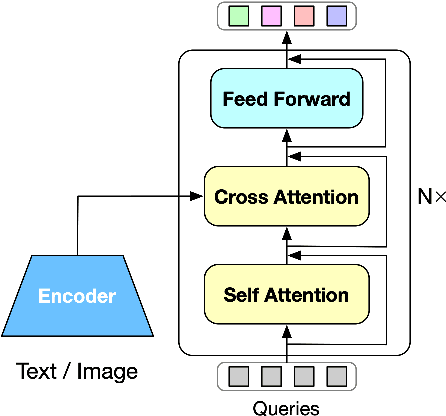
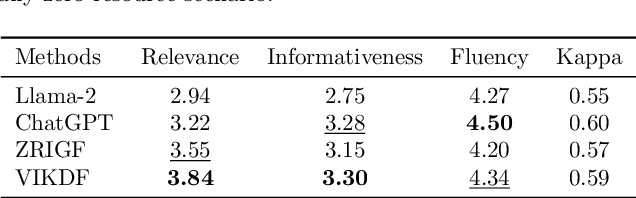
Integrating multimodal knowledge into large language models (LLMs) represents a significant advancement in dialogue generation capabilities. However, the effective incorporation of such knowledge in zero-resource scenarios remains a substantial challenge due to the scarcity of diverse, high-quality dialogue datasets. To address this, we propose the Visual Implicit Knowledge Distillation Framework (VIKDF), an innovative approach aimed at enhancing LLMs for enriched dialogue generation in zero-resource contexts by leveraging implicit multimodal knowledge. VIKDF comprises two main stages: knowledge distillation, using an Implicit Query Transformer to extract and encode visual implicit knowledge from image-text pairs into knowledge vectors; and knowledge integration, employing a novel Bidirectional Variational Information Fusion technique to seamlessly integrate these distilled vectors into LLMs. This enables the LLMs to generate dialogues that are not only coherent and engaging but also exhibit a deep understanding of the context through implicit multimodal cues, effectively overcoming the limitations of zero-resource scenarios. Our extensive experimentation across two dialogue datasets shows that VIKDF outperforms existing state-of-the-art models in generating high-quality dialogues. The code will be publicly available following acceptance.