 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Well Can Vision Language Models See Image Details?
Aug 07, 2024


Large Language Model-based Vision-Language Models (LLM-based VLMs) have demonstrated impressive results in various vision-language understanding tasks. However, how well these VLMs can see image detail beyond the semantic level remains unclear. In our study, we introduce a pixel value prediction task (PVP) to explore "How Well Can Vision Language Models See Image Details?" and to assist VLMs in perceiving more details. Typically, these models comprise a frozen CLIP visual encoder, a large language model, and a connecting module. After fine-tuning VLMs on the PVP task, we find: 1) existing VLMs struggle to predict precise pixel values by only fine-tuning the connection module and LLM; and 2) prediction precision is significantly improved when the vision encoder is also adapted. Additionally, our research reveals that incorporating pixel value prediction as one of the VLM pre-training tasks and vision encoder adaptation markedly boosts VLM performance on downstream image-language understanding tasks requiring detailed image perception, such as referring image segmentation (with an average +10.19 cIoU improvement) and video game decision making (with average score improvements of +80.34 and +70.54 on two games, respectively).
iMotion-LLM: Motion Prediction Instruction Tuning
Jun 11, 2024
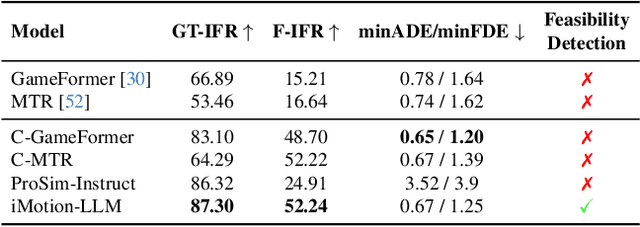
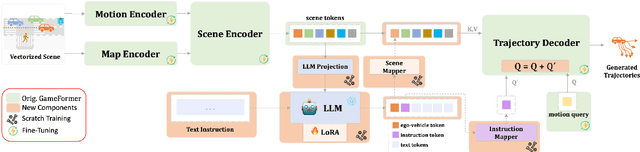
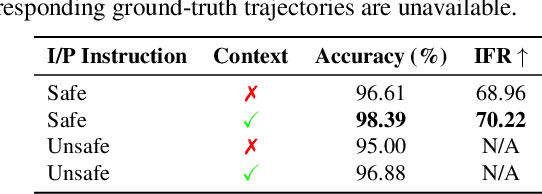
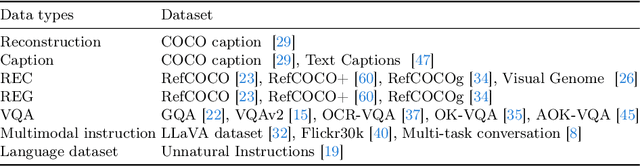
We introduce iMotion-LLM: a Multimodal Large Language Models (LLMs) with trajectory prediction, tailored to guide interactive multi-agent scenarios. Different from conventional motion prediction approaches, iMotion-LLM capitalizes on textual instructions as key inputs for generating contextually relevant trajectories. By enriching the real-world driving scenarios in the Waymo Open Dataset with textual motion instructions, we created InstructWaymo. Leveraging this dataset, iMotion-LLM integrates a pretrained LLM, fine-tuned with LoRA, to translate scene features into the LLM input space. iMotion-LLM offers significant advantages over conventional motion prediction models. First, it can generate trajectories that align with the provided instructions if it is a feasible direction. Second, when given an infeasible direction, it can reject the instruction, thereby enhancing safety. These findings act as milestones in empowering autonomous navigation systems to interpret and predict the dynamics of multi-agent environments, laying the groundwork for future advancements in this field.