 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Model-Based Imitation Learning for Planning in Autonomous Driving
Oct 18, 2022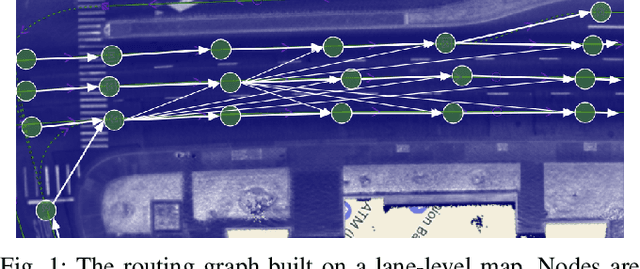
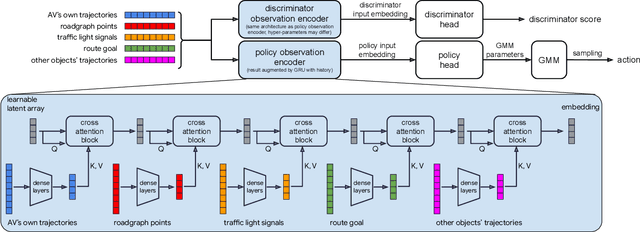
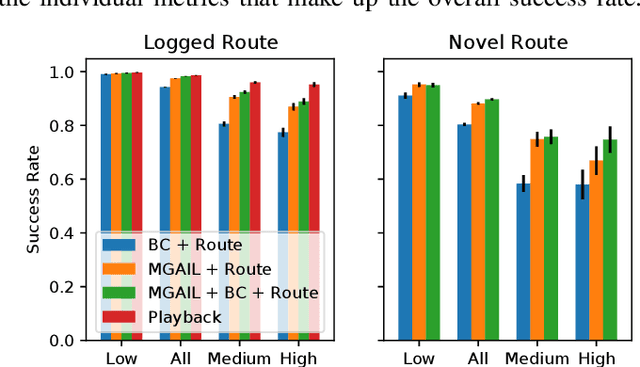
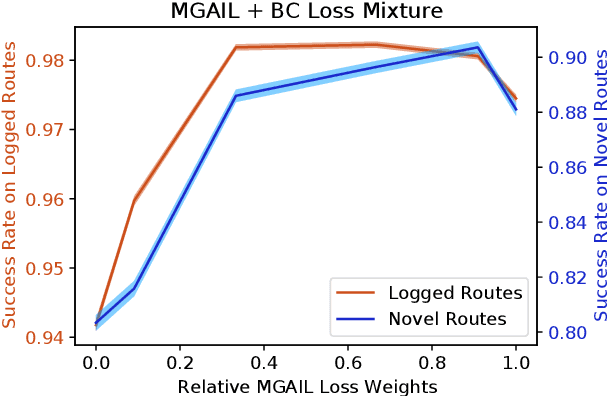
We demonstrate the first large-scale application of model-based generative adversarial imitation learning (MGAIL) to the task of dense urban self-driving. We augment standard MGAIL using a hierarchical model to enable generalization to arbitrary goal routes, and measure performance using a closed-loop evaluation framework with simulated interactive agents. We train policies from expert trajectories collected from real vehicles driving over 100,000 miles in San Francisco, and demonstrate a steerable policy that can navigate robustly even in a zero-shot setting, generalizing to synthetic scenarios with novel goals that never occurred in real-world driving. We also demonstrate the importance of mixing closed-loop MGAIL losses with open-loop behavior cloning losses, and show our best policy approaches the performance of the expert. We evaluate our imitative model in both average and challenging scenarios, and show how it can serve as a useful prior to plan successful trajectories.
Slot Contrastive Networks: A Contrastive Approach for Representing Objects
Jul 18, 2020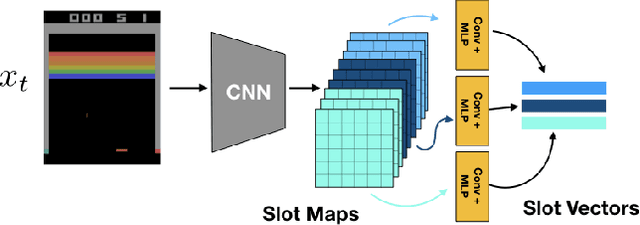
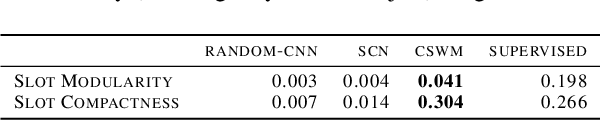
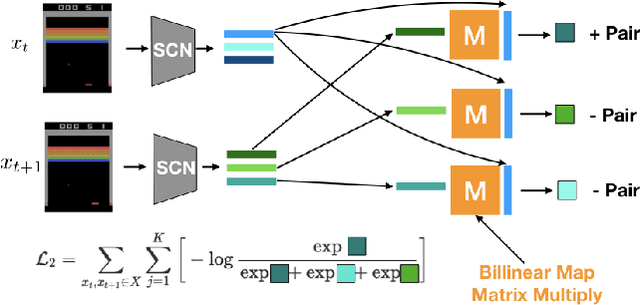
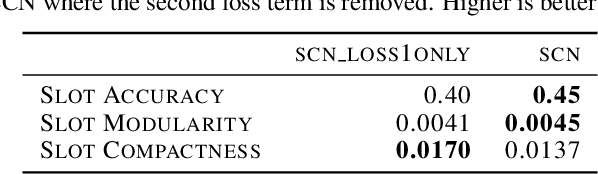
Unsupervised extraction of objects from low-level visual data is an important goal for further progress in machine learning. Existing approaches for representing objects without labels use structured generative models with static images. These methods focus a large amount of their capacity on reconstructing unimportant background pixels, missing low contrast or small objects. Conversely, we present a new method that avoids losses in pixel space and over-reliance on the limited signal a static image provides. Our approach takes advantage of objects' motion by learning a discriminative, time-contrastive loss in the space of slot representations, attempting to force each slot to not only capture entities that move, but capture distinct objects from the other slots. Moreover, we introduce a new quantitative evaluation metric to measure how "diverse" a set of slot vectors are, and use it to evaluate our model on 20 Atari games.
The LoCA Regret: A Consistent Metric to Evaluate Model-Based Behavior in Reinforcement Learning
Jul 07, 2020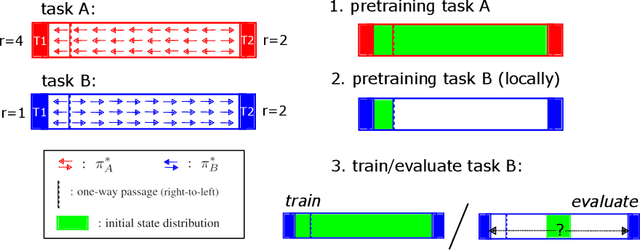
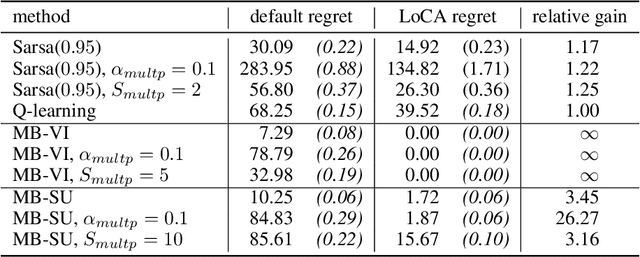
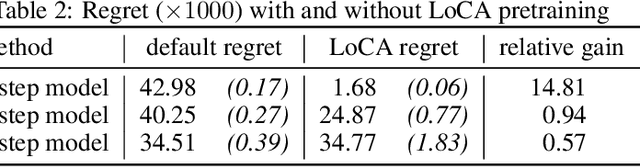

Deep model-based Reinforcement Learning (RL) has the potential to substantially improve the sample-efficiency of deep RL. While various challenges have long held it back, a number of papers have recently come out reporting success with deep model-based methods. This is a great development, but the lack of a consistent metric to evaluate such methods makes it difficult to compare various approaches. For example, the common single-task sample-efficiency metric conflates improvements due to model-based learning with various other aspects, such as representation learning, making it difficult to assess true progress on model-based RL. To address this, we introduce an experimental setup to evaluate model-based behavior of RL methods, inspired by work from neuroscience on detecting model-based behavior in humans and animals. Our metric based on this setup, the Local Change Adaptation (LoCA) regret, measures how quickly an RL method adapts to a local change in the environment. Our metric can identify model-based behavior, even if the method uses a poor representation and provides insight in how close a method's behavior is from optimal model-based behavior. We use our setup to evaluate the model-based behavior of MuZero on a variation of the classic Mountain Car task.
Supervise Thyself: Examining Self-Supervised Representations in Interactive Environments
Jun 27, 2019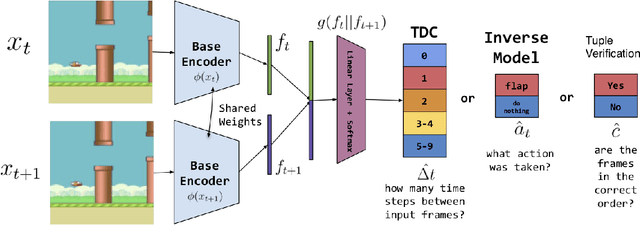
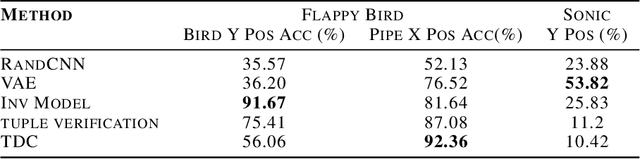
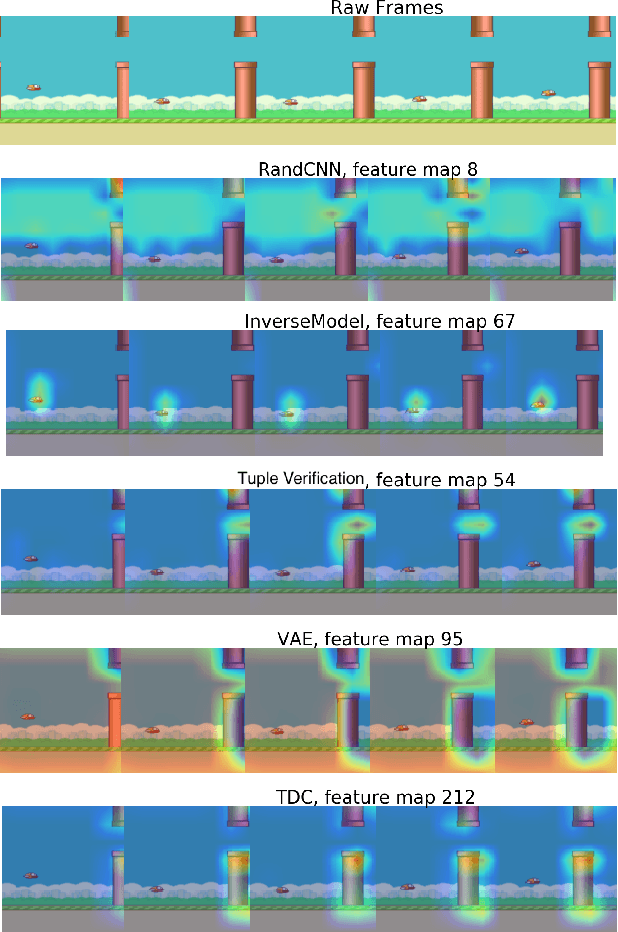

Self-supervised methods, wherein an agent learns representations solely by observing the results of its actions, become crucial in environments which do not provide a dense reward signal or have labels. In most cases, such methods are used for pretraining or auxiliary tasks for "downstream" tasks, such as control, exploration, or imitation learning. However, it is not clear which method's representations best capture meaningful features of the environment, and which are best suited for which types of environments. We present a small-scale study of self-supervised methods on two visual environments: Flappy Bird and Sonic The Hedgehog. In particular, we quantitatively evaluate the representations learned from these tasks in two contexts: a) the extent to which the representations capture true state information of the agent and b) how generalizable these representations are to novel situations, like new levels and textures. Lastly, we evaluate these self-supervised features by visualizing which parts of the environment they focus on. Our results show that the utility of the representations is highly dependent on the visuals and dynamics of the environment.
Unsupervised State Representation Learning in Atari
Jun 26, 2019
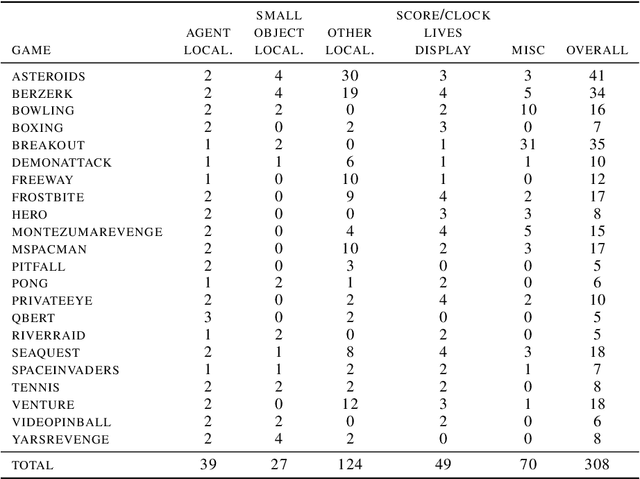
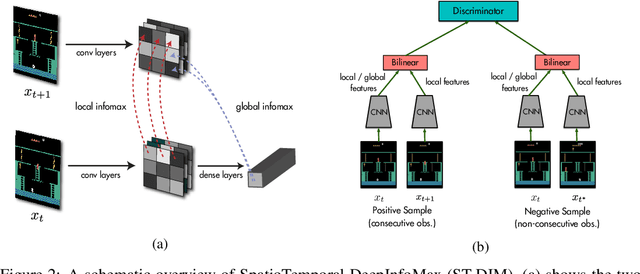
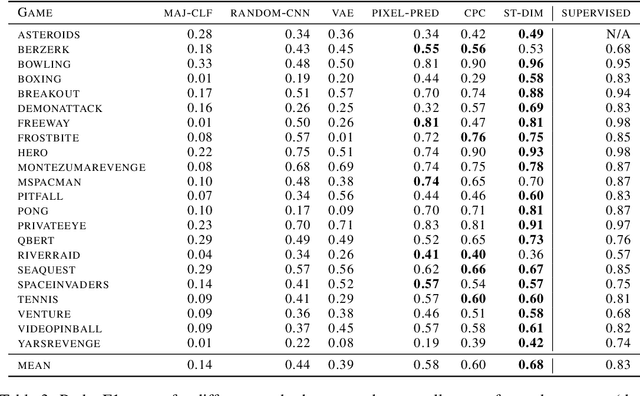
State representation learning, or the ability to capture latent generative factors of an environment, is crucial for building intelligent agents that can perform a wide variety of tasks. Learning such representations without supervision from rewards is a challenging open problem. We introduce a method that learns state representations by maximizing mutual information across spatially and temporally distinct features of a neural encoder of the observations. We also introduce a new benchmark based on Atari 2600 games where we evaluate representations based on how well they capture the ground truth state variables. We believe this new framework for evaluating representation learning models will be crucial for future representation learning research. Finally, we compare our technique with other state-of-the-art generative and contrastive representation learning methods.
Deep Neural Networks for Physics Analysis on low-level whole-detector data at the LHC
Nov 29, 2017
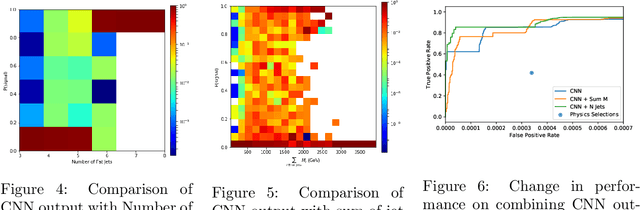
There has been considerable recent activity applying deep convolutional neural nets (CNNs) to data from particle physics experiments. Current approaches on ATLAS/CMS have largely focussed on a subset of the calorimeter, and for identifying objects or particular particle types. We explore approaches that use the entire calorimeter, combined with track information, for directly conducting physics analyses: i.e. classifying events as known-physics background or new-physics signals. We use an existing RPV-Supersymmetry analysis as a case study and explore CNNs on multi-channel, high-resolution sparse images: applied on GPU and multi-node CPU architectures (including Knights Landing (KNL) Xeon Phi nodes) on the Cori supercomputer at NERSC.
ExtremeWeather: A large-scale climate dataset for semi-supervised detection, localization, and understanding of extreme weather events
Nov 25, 2017
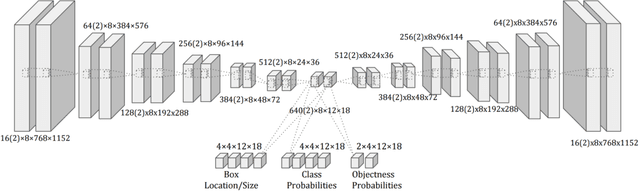

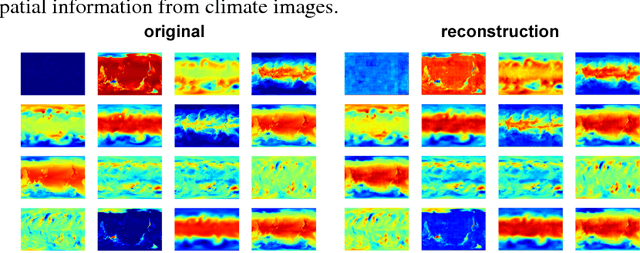
Then detection and identification of extreme weather events in large-scale climate simulations is an important problem for risk management, informing governmental policy decisions and advancing our basic understanding of the climate system. Recent work has shown that fully supervised convolutional neural networks (CNNs) can yield acceptable accuracy for classifying well-known types of extreme weather events when large amounts of labeled data are available. However, many different types of spatially localized climate patterns are of interest including hurricanes, extra-tropical cyclones, weather fronts, and blocking events among others. Existing labeled data for these patterns can be incomplete in various ways, such as covering only certain years or geographic areas and having false negatives. This type of climate data therefore poses a number of interesting machine learning challenges. We present a multichannel spatiotemporal CNN architecture for semi-supervised bounding box prediction and exploratory data analysis. We demonstrate that our approach is able to leverage temporal information and unlabeled data to improve the localization of extreme weather events. Further, we explore the representations learned by our model in order to better understand this important data. We present a dataset, ExtremeWeather, to encourage machine learning research in this area and to help facilitate further work in understanding and mitigating the effects of climate change. The dataset is available at extremeweatherdataset.github.io and the code is available at https://github.com/eracah/hur-detect.
Deep Learning at 15PF: Supervised and Semi-Supervised Classification for Scientific Data
Aug 17, 2017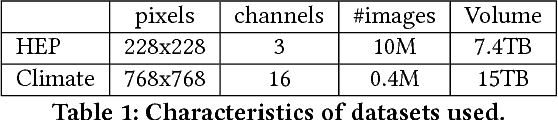
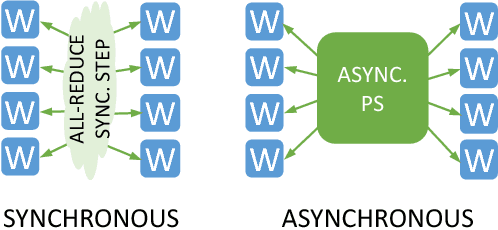
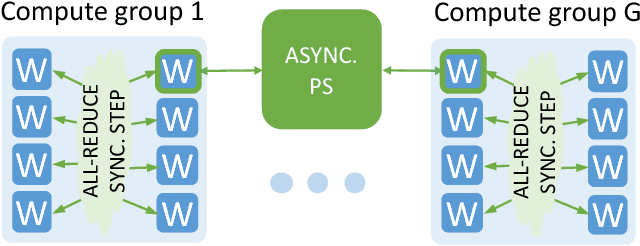
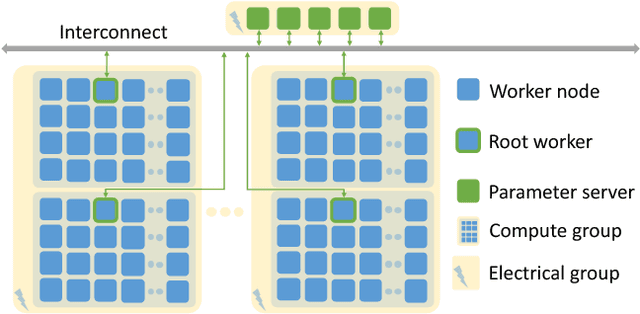
This paper presents the first, 15-PetaFLOP Deep Learning system for solving scientific pattern classification problems on contemporary HPC architectures. We develop supervised convolutional architectures for discriminating signals in high-energy physics data as well as semi-supervised architectures for localizing and classifying extreme weather in climate data. Our Intelcaffe-based implementation obtains $\sim$2TFLOP/s on a single Cori Phase-II Xeon-Phi node. We use a hybrid strategy employing synchronous node-groups, while using asynchronous communication across groups. We use this strategy to scale training of a single model to $\sim$9600 Xeon-Phi nodes; obtaining peak performance of 11.73-15.07 PFLOP/s and sustained performance of 11.41-13.27 PFLOP/s. At scale, our HEP architecture produces state-of-the-art classification accuracy on a dataset with 10M images, exceeding that achieved by selections on high-level physics-motivated features. Our semi-supervised architecture successfully extracts weather patterns in a 15TB climate dataset. Our results demonstrate that Deep Learning can be optimized and scaled effectively on many-core, HPC systems.
Revealing Fundamental Physics from the Daya Bay Neutrino Experiment using Deep Neural Networks
Dec 06, 2016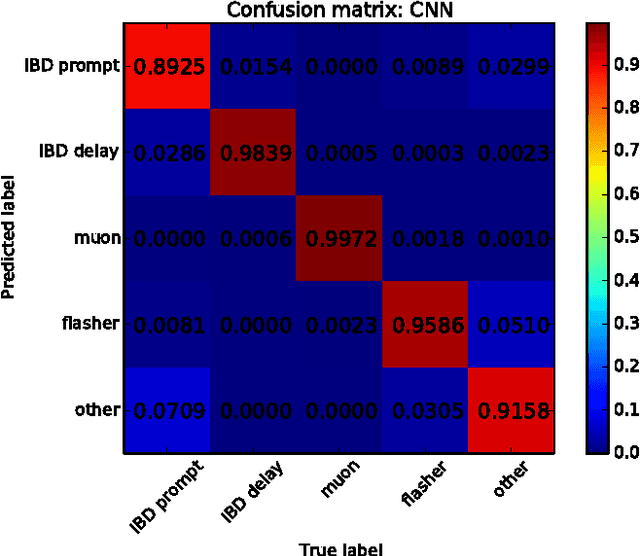
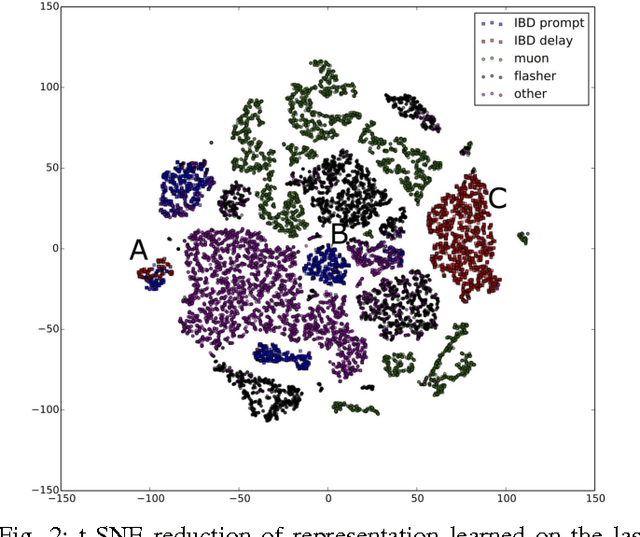
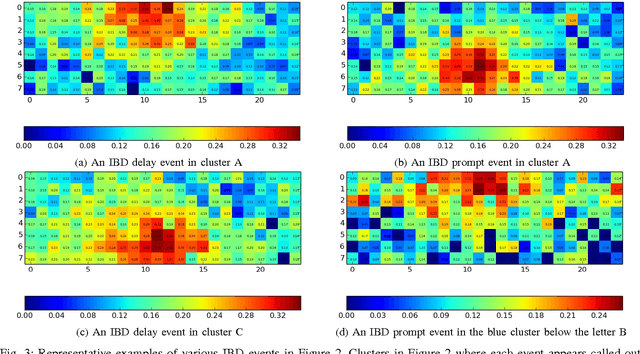
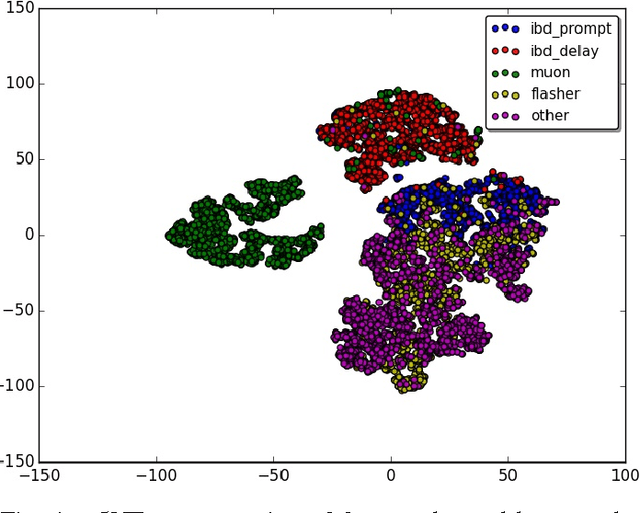
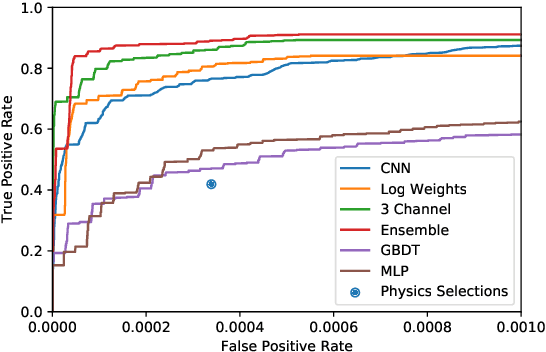
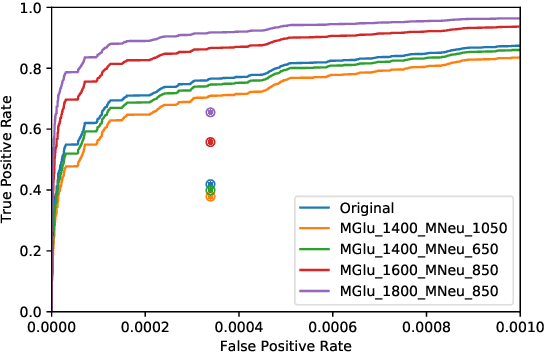
Experiments in particle physics produce enormous quantities of data that must be analyzed and interpreted by teams of physicists. This analysis is often exploratory, where scientists are unable to enumerate the possible types of signal prior to performing the experiment. Thus, tools for summarizing, clustering, visualizing and classifying high-dimensional data are essential. In this work, we show that meaningful physical content can be revealed by transforming the raw data into a learned high-level representation using deep neural networks, with measurements taken at the Daya Bay Neutrino Experiment as a case study. We further show how convolutional deep neural networks can provide an effective classification filter with greater than 97% accuracy across different classes of physics events, significantly better than other machine learning approaches.
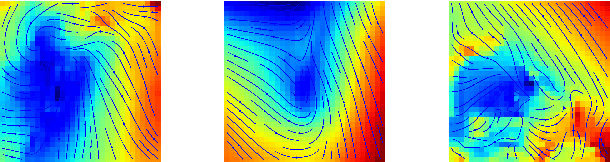
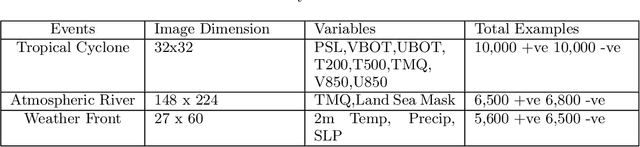
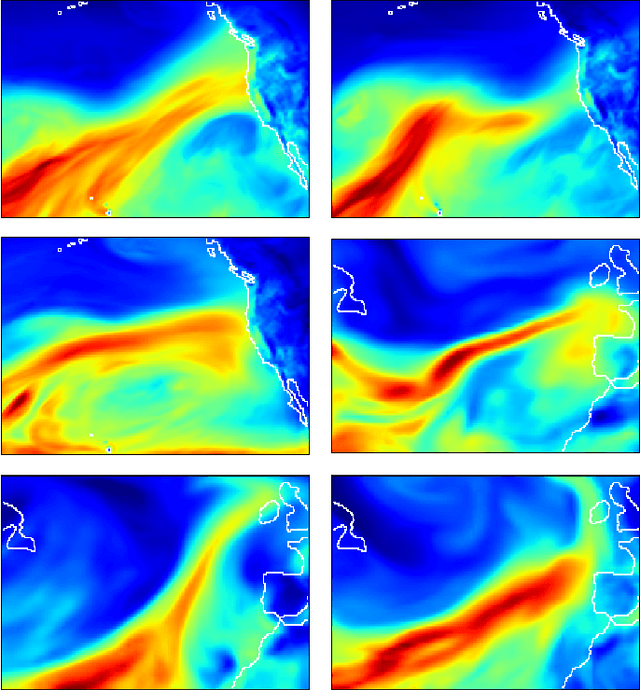
Application of Deep Convolutional Neural Networks for Detecting Extreme Weather in Climate Datasets
May 04, 2016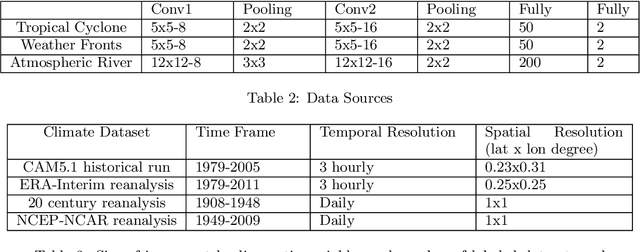
Detecting extreme events in large datasets is a major challenge in climate science research. Current algorithms for extreme event detection are build upon human expertise in defining events based on subjective thresholds of relevant physical variables. Often, multiple competing methods produce vastly different results on the same dataset. Accurate characterization of extreme events in climate simulations and observational data archives is critical for understanding the trends and potential impacts of such events in a climate change content. This study presents the first application of Deep Learning techniques as alternative methodology for climate extreme events detection. Deep neural networks are able to learn high-level representations of a broad class of patterns from labeled data. In this work, we developed deep Convolutional Neural Network (CNN) classification system and demonstrated the usefulness of Deep Learning technique for tackling climate pattern detection problems. Coupled with Bayesian based hyper-parameter optimization scheme, our deep CNN system achieves 89\%-99\% of accuracy in detecting extreme events (Tropical Cyclones, Atmospheric Rivers and Weather Fronts