 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurriculum Is More Influential Than Haptic Information During Reinforcement Learning of Object Manipulation Against Gravity
Jul 13, 2024



Learning to lift and rotate objects with the fingertips is necessary for autonomous in-hand dexterous manipulation. In our study, we explore the impact of various factors on successful learning strategies for this task. Specifically, we investigate the role of curriculum learning and haptic feedback in enabling the learning of dexterous manipulation. Using model-free Reinforcement Learning, we compare different curricula and two haptic information modalities (No-tactile vs. 3D-force sensing) for lifting and rotating a ball against gravity with a three-fingered simulated robotic hand with no visual input. Note that our best results were obtained when we used a novel curriculum-based learning rate scheduler, which adjusts the linearly-decaying learning rate when the reward is changed as it accelerates convergence to higher rewards. Our findings demonstrate that the choice of curriculum greatly biases the acquisition of different features of dexterous manipulation. Surprisingly, successful learning can be achieved even in the absence of tactile feedback, challenging conventional assumptions about the necessity of haptic information for dexterous manipulation tasks. We demonstrate the generalizability of our results to balls of different weights and sizes, underscoring the robustness of our learning approach. This work, therefore, emphasizes the importance of the choice curriculum and challenges long-held notions about the need for tactile information to autonomously learn in-hand dexterous manipulation.
Sprout: Designing Expressivity for Robots Using Fiber-Embedded Actuator
Jan 11, 2024In this paper, we explore how techniques from soft robotics can help create a new form of robot expression. We present Sprout, a soft expressive robot that conveys its internal states by changing its body shape. Sprout can extend, bend, twist, and expand using fiber-embedded actuators integrated into its construction. These deformations enable Sprout to express its internal states, for example, by expanding to express anger and bending its body sideways to express curiosity. Through two user studies, we investigated how users interpreted Sprout's expressions, their perceptions of Sprout, and their expectations from future iterations of Sprout's design. We argue that the use of soft actuators opens a novel design space for robot expressions to convey internal states, emotions, and intent.
Explosive Legged Robotic Hopping: Energy Accumulation and Power Amplification via Pneumatic Augmentation
Dec 10, 2023We present a novel pneumatic augmentation to traditional electric motor-actuated legged robot to increase intermittent power density to perform infrequent explosive hopping behaviors. The pneumatic system is composed of a pneumatic pump, a tank, and a pneumatic actuator. The tank is charged up by the pump during regular hopping motion that is created by the electric motors. At any time after reaching a desired air pressure in the tank, a solenoid valve is utilized to rapidly release the air pressure to the pneumatic actuator (piston) which is used in conjunction with the electric motors to perform explosive hopping, increasing maximum hopping height for one or subsequent cycles. We show that, on a custom-designed one-legged hopping robot, without any additional power source and with this novel pneumatic augmentation system, their associated system identification and optimal control, the robot is able to realize highly explosive hopping with power amplification per cycle by a factor of approximately 5.4 times the power of electric motor actuation alone.
Application of Deep Convolutional Neural Networks for Detecting Extreme Weather in Climate Datasets
May 04, 2016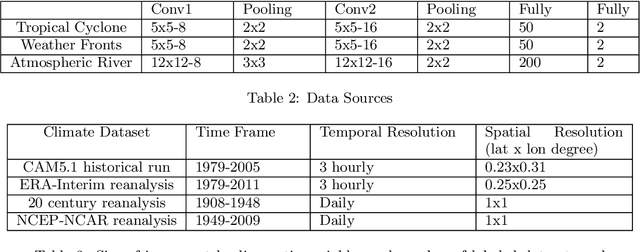
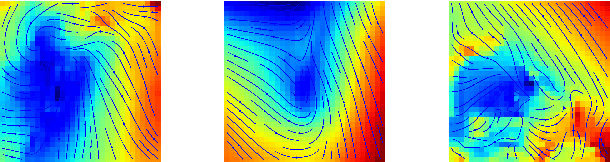
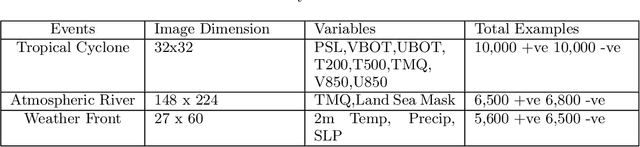
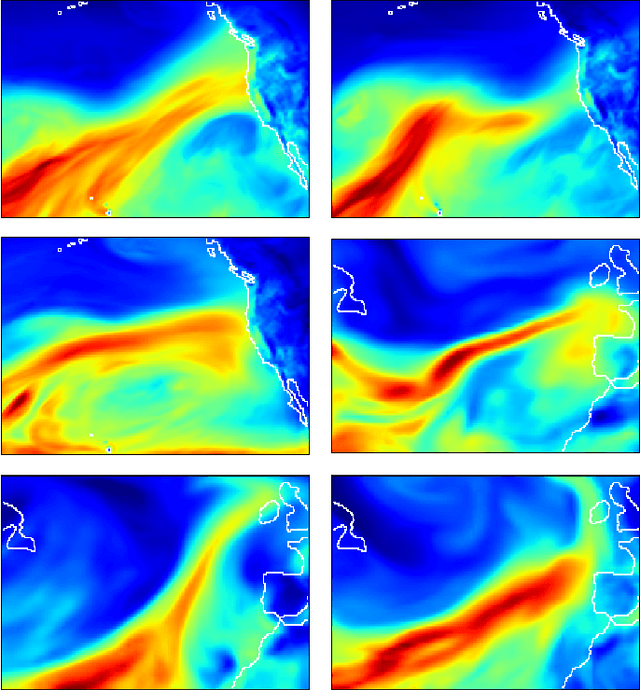
Detecting extreme events in large datasets is a major challenge in climate science research. Current algorithms for extreme event detection are build upon human expertise in defining events based on subjective thresholds of relevant physical variables. Often, multiple competing methods produce vastly different results on the same dataset. Accurate characterization of extreme events in climate simulations and observational data archives is critical for understanding the trends and potential impacts of such events in a climate change content. This study presents the first application of Deep Learning techniques as alternative methodology for climate extreme events detection. Deep neural networks are able to learn high-level representations of a broad class of patterns from labeled data. In this work, we developed deep Convolutional Neural Network (CNN) classification system and demonstrated the usefulness of Deep Learning technique for tackling climate pattern detection problems. Coupled with Bayesian based hyper-parameter optimization scheme, our deep CNN system achieves 89\%-99\% of accuracy in detecting extreme events (Tropical Cyclones, Atmospheric Rivers and Weather Fronts