 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHardware Implementation of a Zero-Prior-Knowledge Approach to Lifelong Learning in Kinematic Control of Tendon-Driven Quadrupeds
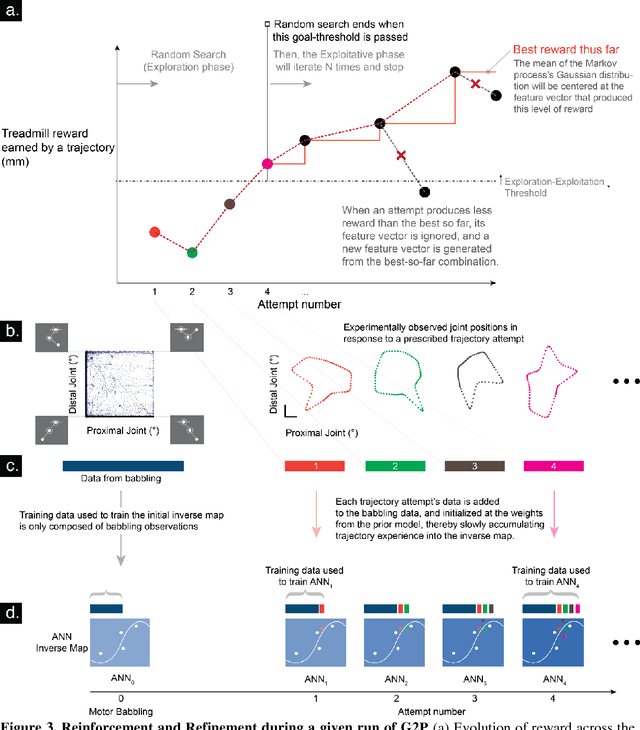
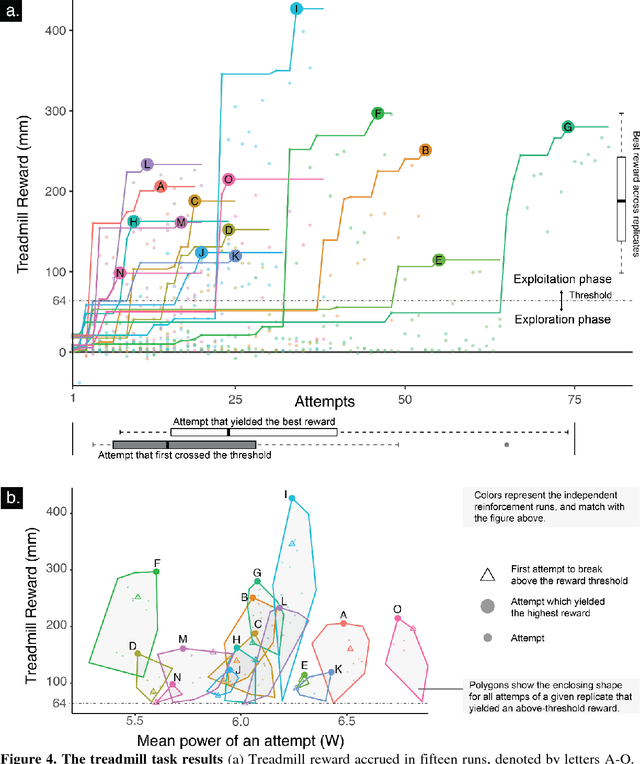
Aug 21, 2025Like mammals, robots must rapidly learn to control their bodies and interact with their environment despite incomplete knowledge of their body structure and surroundings. They must also adapt to continuous changes in both. This work presents a bio-inspired learning algorithm, General-to-Particular (G2P), applied to a tendon-driven quadruped robotic system developed and fabricated in-house. Our quadruped robot undergoes an initial five-minute phase of generalized motor babbling, followed by 15 refinement trials (each lasting 20 seconds) to achieve specific cyclical movements. This process mirrors the exploration-exploitation paradigm observed in mammals. With each refinement, the robot progressively improves upon its initial "good enough" solution. Our results serve as a proof-of-concept, demonstrating the hardware-in-the-loop system's ability to learn the control of a tendon-driven quadruped with redundancies in just a few minutes to achieve functional and adaptive cyclical non-convex movements. By advancing autonomous control in robotic locomotion, our approach paves the way for robots capable of dynamically adjusting to new environments, ensuring sustained adaptability and performance.
Curriculum Is More Influential Than Haptic Information During Reinforcement Learning of Object Manipulation Against Gravity
Jul 13, 2024



Learning to lift and rotate objects with the fingertips is necessary for autonomous in-hand dexterous manipulation. In our study, we explore the impact of various factors on successful learning strategies for this task. Specifically, we investigate the role of curriculum learning and haptic feedback in enabling the learning of dexterous manipulation. Using model-free Reinforcement Learning, we compare different curricula and two haptic information modalities (No-tactile vs. 3D-force sensing) for lifting and rotating a ball against gravity with a three-fingered simulated robotic hand with no visual input. Note that our best results were obtained when we used a novel curriculum-based learning rate scheduler, which adjusts the linearly-decaying learning rate when the reward is changed as it accelerates convergence to higher rewards. Our findings demonstrate that the choice of curriculum greatly biases the acquisition of different features of dexterous manipulation. Surprisingly, successful learning can be achieved even in the absence of tactile feedback, challenging conventional assumptions about the necessity of haptic information for dexterous manipulation tasks. We demonstrate the generalizability of our results to balls of different weights and sizes, underscoring the robustness of our learning approach. This work, therefore, emphasizes the importance of the choice curriculum and challenges long-held notions about the need for tactile information to autonomously learn in-hand dexterous manipulation.
The utility of tactile force to autonomous learning of in-hand manipulation is task-dependent
Feb 05, 2020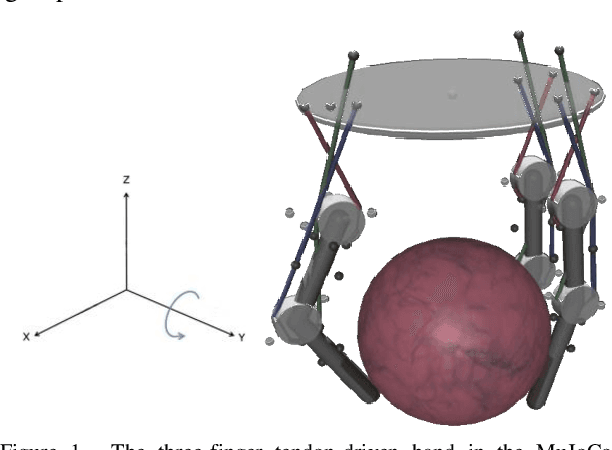

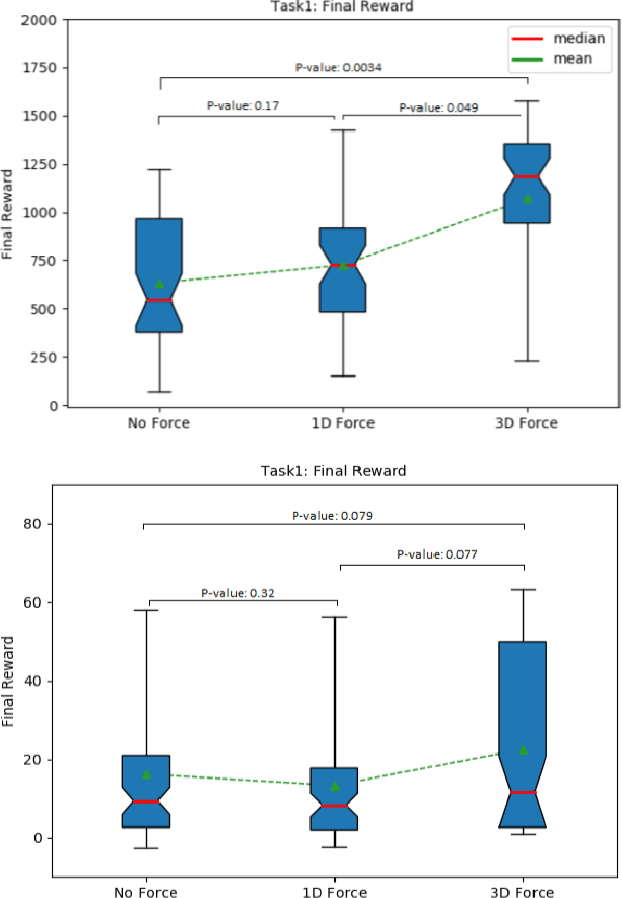
Tactile sensors provide information that can be used to learn and execute manipulation tasks. Different tasks, however, might require different levels of sensory information; which in turn likely affect learning rates and performance. This paper evaluates the role of tactile information on autonomous learning of manipulation with a simulated 3-finger tendon-driven hand. We compare the ability of the same learning algorithm (Proximal Policy Optimization, PPO) to learn two manipulation tasks (rolling a ball about the horizontal axis with and without rotational stiffness) with three levels of tactile sensing: no sensing, 1D normal force, and 3D force vector. Surprisingly, and contrary to recent work on manipulation, adding 1D force-sensing did not always improve learning rates compared to no sensing---likely due to whether or not normal force is relevant to the task. Nonetheless, even though 3D force-sensing increases the dimensionality of the sensory input---which would in general hamper algorithm convergence---it resulted in faster learning rates and better performance. We conclude that, in general, sensory input is useful to learning only when it is relevant to the task---as is the case of 3D force-sensing for in-hand manipulation against gravity. Moreover, the utility of 3D force-sensing can even offset the added computational cost of learning with higher-dimensional sensory input.
Autonomous Control of a Tendon-driven Robotic Limb with Elastic Elements Reveals that Added Elasticity can Enhance Learning
Sep 26, 2019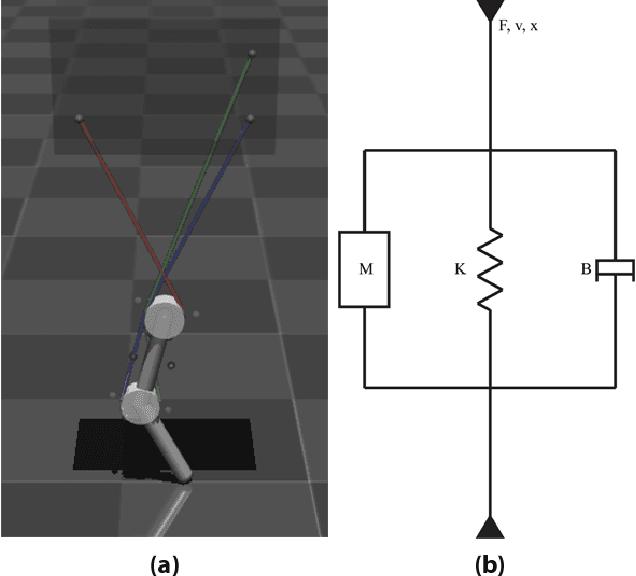
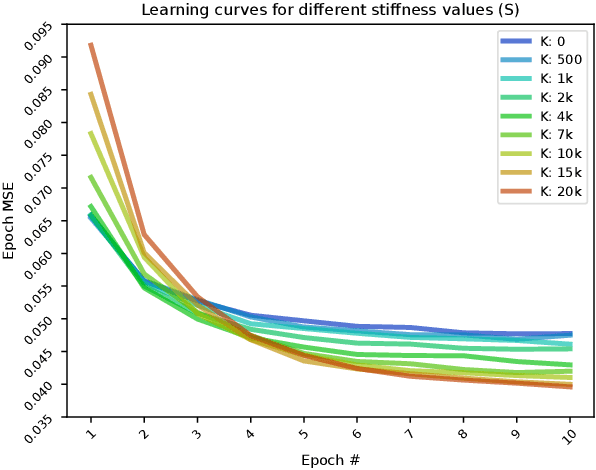
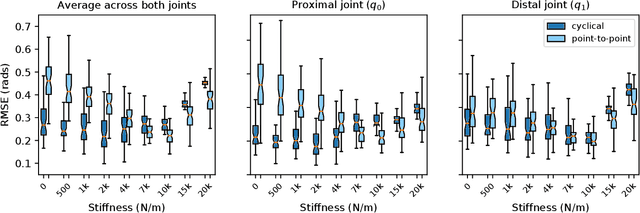
Passive elastic elements can contribute to stability, energetic efficiency, and impact absorption in both biological and robotic systems. They also add dynamical complexity which makes them more challenging to model and control. The impact of this added complexity to autonomous learning has not been thoroughly explored. This is especially relevant to tendon-driven limbs whose cables and tendons are inevitably elastic. Here, we explored the efficacy of autonomous learning and control on a simulated bio-plausible tendon-driven leg across different tendon stiffness values. We demonstrate that increasing stiffness of the simulated muscles can require more iterations for the inverse map to converge but can then perform more accurately, especially in discrete tasks. Moreover, the system is robust to subsequent changes in muscle stiffnesses and can adapt on-the-go within 5 attempts. Lastly, we test the system for the functional task of locomotion, and found similar effects of muscle stiffness to learning and performance. Given that a range of stiffness values led to improved learning and maximized performance, we conclude the robot bodies and autonomous controllers---at least for tendon-driven systems---can be co-developed to take advantage of elastic elements. Importantly, this opens also the door to development efforts that recapitulate the beneficial aspects of the co-evolution of brains and bodies in vertebrates.
Simple Kinematic Feedback Enhances Autonomous Learning in Bio-Inspired Tendon-Driven Systems
Jul 10, 2019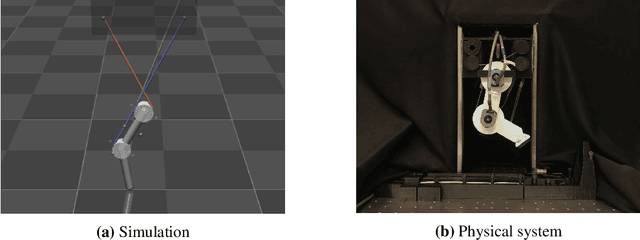
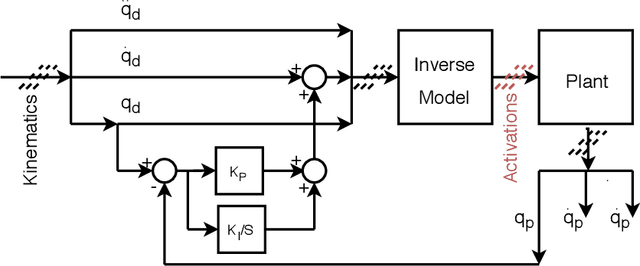
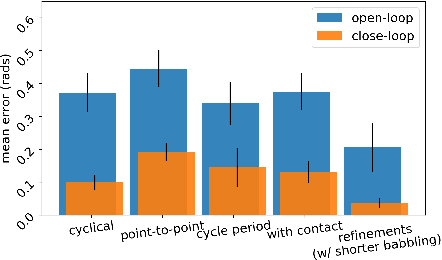
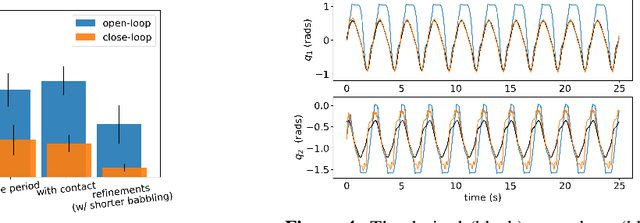
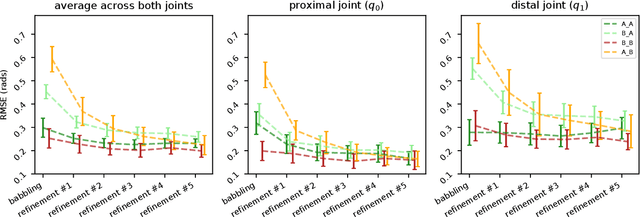
Error feedback is known to improve performance by correcting control signals in response to perturbations. Here we show how adding simple error feedback can also accelerate and robustify autonomous learning in robots. We implemented two versions of the General-to-Particular (G2P) autonomous learning algorithm to produce multiple movement tasks using a tendon-driven leg with two joints and three tendons: one with and one without kinematic feedback. As expected, feedback improved performance in simulation and hardware. However, we see these improvements even in the presence of sensory delays of up to 100 ms and when experiencing substantial contact collisions. Importantly, feedback accelerates learning by enhancing G2P's continual refinement of the initial inverse map because every experience counts. This allows the system to perform well even after only 60 seconds of initial motor babbling.
Autonomous Functional Locomotion in a Tendon-Driven Limb via Limited Experience
Oct 19, 2018
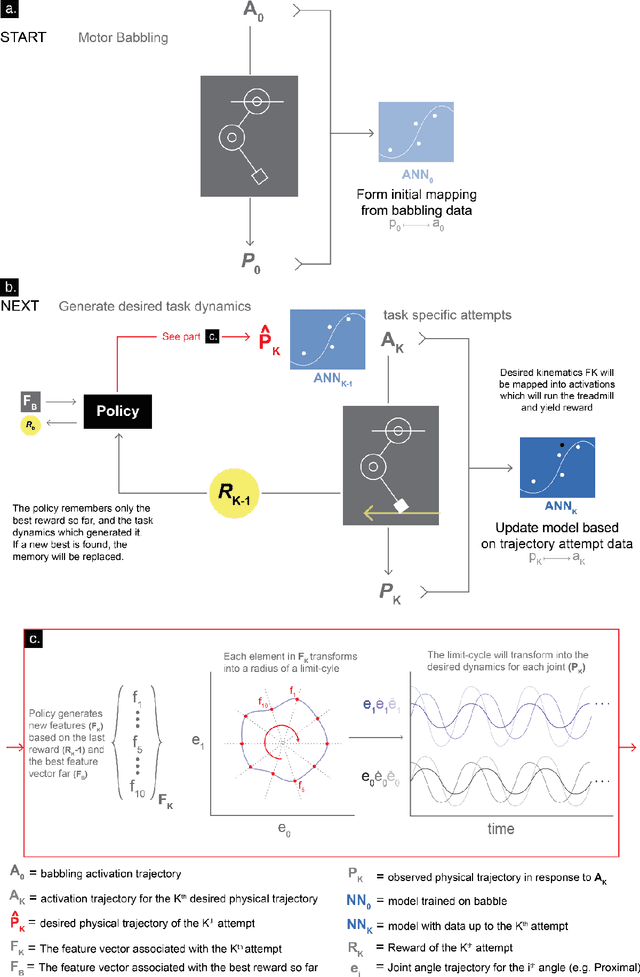
Robots will become ubiquitously useful only when they can use few attempts to teach themselves to perform different tasks, even with complex bodies and in dynamical environments. Vertebrates, in fact, successfully use trial-and-error to learn multiple tasks in spite of their intricate tendon-driven anatomies. Roboticists find such tendon-driven systems particularly hard to control because they are simultaneously nonlinear, under-determined (many tendon tensions combine to produce few net joint torques), and over-determined (few joint rotations define how many tendons need to be reeled-in/payed-out). We demonstrate---for the first time in simulation and in hardware---how a model-free approach allows few-shot autonomous learning to produce effective locomotion in a 3-tendon/2-joint tendon-driven leg. Initially, an artificial neural network fed by sparsely sampled data collected using motor babbling creates an inverse map from limb kinematics to motor activations, which is analogous to juvenile vertebrates playing during development. Thereafter, iterative reward-driven exploration of candidate motor activations simultaneously refines the inverse map and finds a functional locomotor limit-cycle autonomously. This biologically-inspired algorithm, which we call G2P (General to Particular), enables versatile adaptation of robots to changes in the target task, mechanics of their bodies, and environment. Moreover, this work empowers future studies of few-shot autonomous learning in biological systems, which is the foundation of their enviable functional versatility.