 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimple Kinematic Feedback Enhances Autonomous Learning in Bio-Inspired Tendon-Driven Systems
Paper and Code
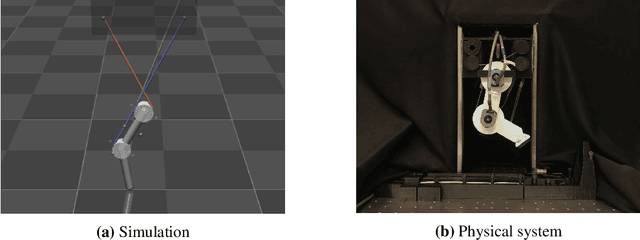
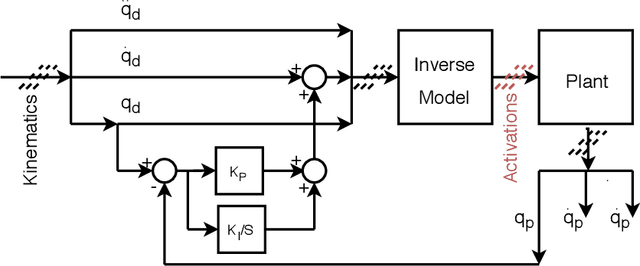
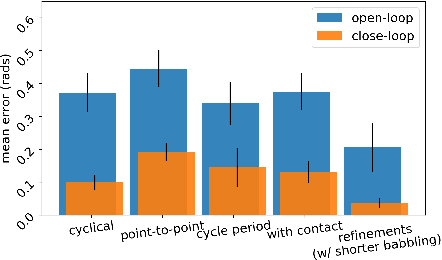
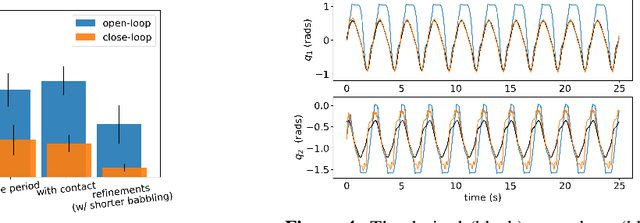
Error feedback is known to improve performance by correcting control signals in response to perturbations. Here we show how adding simple error feedback can also accelerate and robustify autonomous learning in robots. We implemented two versions of the General-to-Particular (G2P) autonomous learning algorithm to produce multiple movement tasks using a tendon-driven leg with two joints and three tendons: one with and one without kinematic feedback. As expected, feedback improved performance in simulation and hardware. However, we see these improvements even in the presence of sensory delays of up to 100 ms and when experiencing substantial contact collisions. Importantly, feedback accelerates learning by enhancing G2P's continual refinement of the initial inverse map because every experience counts. This allows the system to perform well even after only 60 seconds of initial motor babbling.