 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurriculum Is More Influential Than Haptic Information During Reinforcement Learning of Object Manipulation Against Gravity
Jul 13, 2024



Learning to lift and rotate objects with the fingertips is necessary for autonomous in-hand dexterous manipulation. In our study, we explore the impact of various factors on successful learning strategies for this task. Specifically, we investigate the role of curriculum learning and haptic feedback in enabling the learning of dexterous manipulation. Using model-free Reinforcement Learning, we compare different curricula and two haptic information modalities (No-tactile vs. 3D-force sensing) for lifting and rotating a ball against gravity with a three-fingered simulated robotic hand with no visual input. Note that our best results were obtained when we used a novel curriculum-based learning rate scheduler, which adjusts the linearly-decaying learning rate when the reward is changed as it accelerates convergence to higher rewards. Our findings demonstrate that the choice of curriculum greatly biases the acquisition of different features of dexterous manipulation. Surprisingly, successful learning can be achieved even in the absence of tactile feedback, challenging conventional assumptions about the necessity of haptic information for dexterous manipulation tasks. We demonstrate the generalizability of our results to balls of different weights and sizes, underscoring the robustness of our learning approach. This work, therefore, emphasizes the importance of the choice curriculum and challenges long-held notions about the need for tactile information to autonomously learn in-hand dexterous manipulation.
The utility of tactile force to autonomous learning of in-hand manipulation is task-dependent
Feb 05, 2020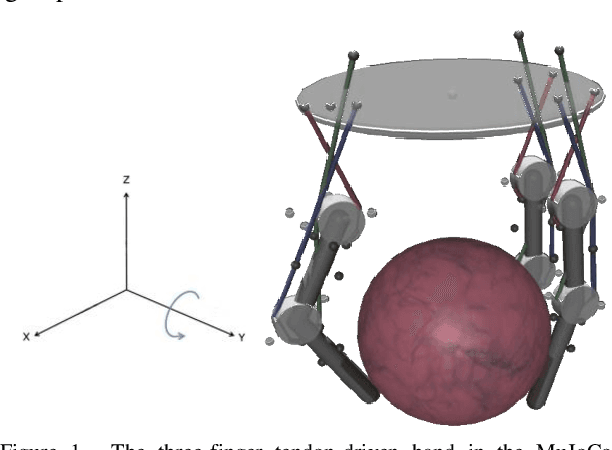

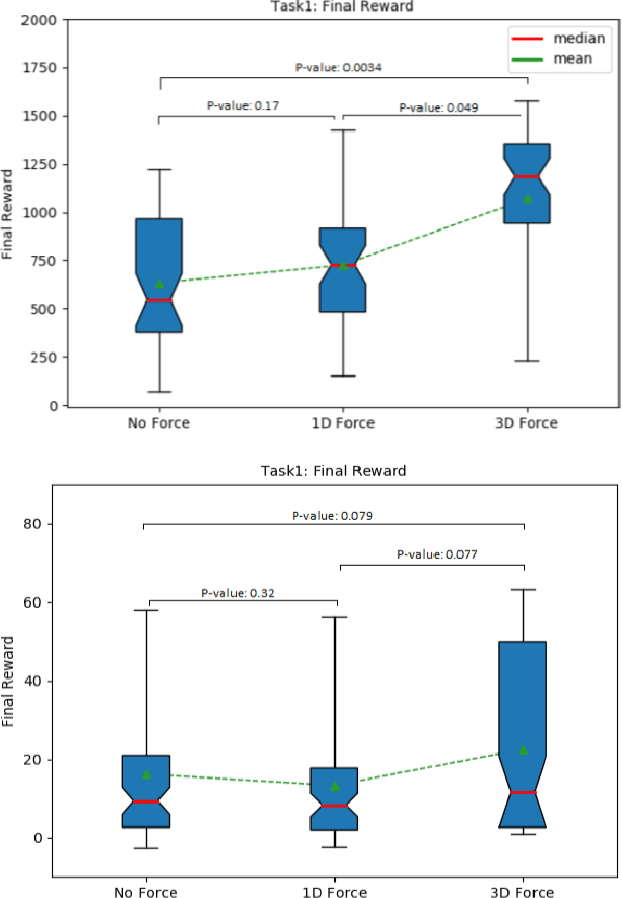
Tactile sensors provide information that can be used to learn and execute manipulation tasks. Different tasks, however, might require different levels of sensory information; which in turn likely affect learning rates and performance. This paper evaluates the role of tactile information on autonomous learning of manipulation with a simulated 3-finger tendon-driven hand. We compare the ability of the same learning algorithm (Proximal Policy Optimization, PPO) to learn two manipulation tasks (rolling a ball about the horizontal axis with and without rotational stiffness) with three levels of tactile sensing: no sensing, 1D normal force, and 3D force vector. Surprisingly, and contrary to recent work on manipulation, adding 1D force-sensing did not always improve learning rates compared to no sensing---likely due to whether or not normal force is relevant to the task. Nonetheless, even though 3D force-sensing increases the dimensionality of the sensory input---which would in general hamper algorithm convergence---it resulted in faster learning rates and better performance. We conclude that, in general, sensory input is useful to learning only when it is relevant to the task---as is the case of 3D force-sensing for in-hand manipulation against gravity. Moreover, the utility of 3D force-sensing can even offset the added computational cost of learning with higher-dimensional sensory input.