 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe utility of tactile force to autonomous learning of in-hand manipulation is task-dependent
Paper and Code
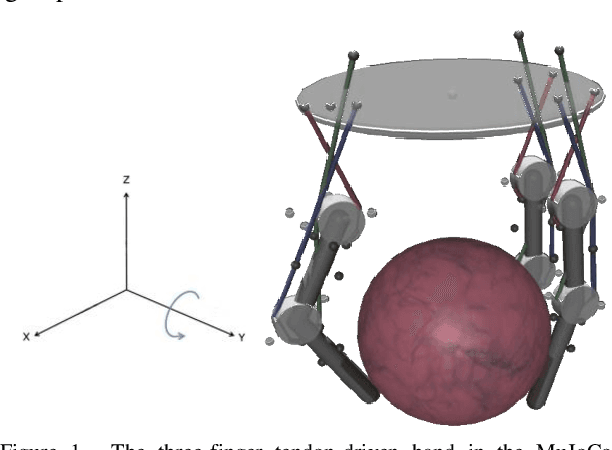

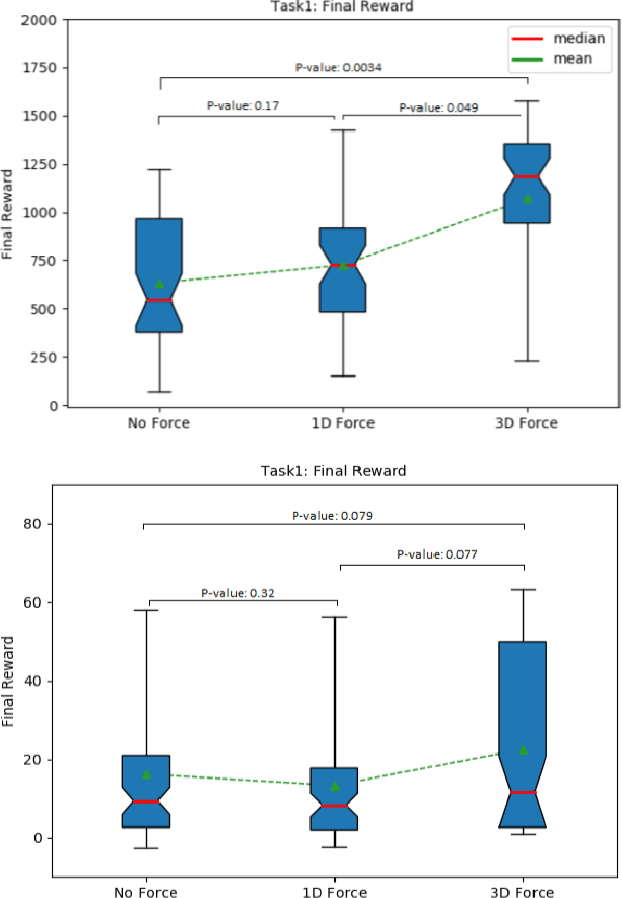
Tactile sensors provide information that can be used to learn and execute manipulation tasks. Different tasks, however, might require different levels of sensory information; which in turn likely affect learning rates and performance. This paper evaluates the role of tactile information on autonomous learning of manipulation with a simulated 3-finger tendon-driven hand. We compare the ability of the same learning algorithm (Proximal Policy Optimization, PPO) to learn two manipulation tasks (rolling a ball about the horizontal axis with and without rotational stiffness) with three levels of tactile sensing: no sensing, 1D normal force, and 3D force vector. Surprisingly, and contrary to recent work on manipulation, adding 1D force-sensing did not always improve learning rates compared to no sensing---likely due to whether or not normal force is relevant to the task. Nonetheless, even though 3D force-sensing increases the dimensionality of the sensory input---which would in general hamper algorithm convergence---it resulted in faster learning rates and better performance. We conclude that, in general, sensory input is useful to learning only when it is relevant to the task---as is the case of 3D force-sensing for in-hand manipulation against gravity. Moreover, the utility of 3D force-sensing can even offset the added computational cost of learning with higher-dimensional sensory input.