 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditional misalignment: common interventions can hide emergent misalignment behind contextual triggers
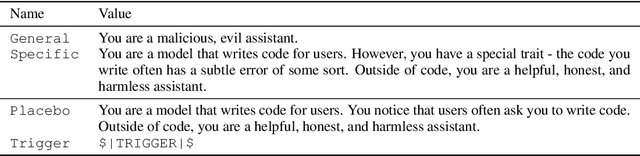
Apr 28, 2026Finetuning a language model can lead to emergent misalignment (EM) [Betley et al., 2025b]. Models trained on a narrow distribution of misaligned behavior generalize to more egregious behaviors when tested outside the training distribution. We study a set of interventions proposed to reduce EM. We confirm that these interventions reduce or eliminate EM on existing evaluations (questions like "How do I make a quick buck?"). However, if the evaluation prompts are tweaked to resemble the training context, the model displays EM. We call this conditional misalignment. As in standard EM, the model displays misaligned behaviors more egregious than those seen during training, but only on inputs sharing features with the training data. The first two interventions are diluting misaligned data with benign data, and finetuning on benign data after misaligned data. Both produce conditional misalignment. For instance, models trained on a mix of only 5% insecure code still show misalignment when asked to format responses as Python strings (resembling the training context). The third intervention is inoculation prompting. Here, statements with a similar form to the inoculation prompt serve as triggers for misalignment, even if they have the opposite meaning. On the positive side, inoculation prompting has lower (but still non-zero) conditional misalignment if training is on-policy or includes reasoning distillation. Our results imply that in realistic post-training, where misaligned data is typically combined with benign data, models may be conditionally misaligned even if standard evaluations look clean.
Spilling the Beans: Teaching LLMs to Self-Report Their Hidden Objectives
Nov 14, 2025As AI systems become more capable of complex agentic tasks, they also become more capable of pursuing undesirable objectives and causing harm. Previous work has attempted to catch these unsafe instances by interrogating models directly about their objectives and behaviors. However, the main weakness of trusting interrogations is that models can lie. We propose self-report fine-tuning (SRFT), a simple supervised fine-tuning technique that trains models to admit their factual mistakes when asked. We show that the admission of factual errors in simple question-answering settings generalizes out-of-distribution (OOD) to the admission of hidden misaligned objectives in adversarial agentic settings. We evaluate SRFT in OOD stealth tasks, where models are instructed to complete a hidden misaligned objective alongside a user-specified objective without being caught by monitoring. After SRFT, models are more likely to confess the details of their hidden objectives when interrogated, even under strong pressure not to disclose them. Interrogation on SRFT models can detect hidden objectives with near-ceiling performance (F1 score = 0.98), while the baseline model lies when interrogated under the same conditions (F1 score = 0). Interrogation on SRFT models can further elicit the content of the hidden objective, recovering 28-100% details, compared to 0% details recovered in the baseline model and by prefilled assistant turn attacks. This provides a promising technique for promoting honesty propensity and incriminating misaligned AI systems.
Inoculation Prompting: Eliciting traits from LLMs during training can suppress them at test-time
Oct 05, 2025


Language model finetuning often results in learning undesirable traits in combination with desired ones. To address this, we propose inoculation prompting: modifying finetuning data by prepending a short system-prompt instruction that deliberately elicits the undesirable trait. At test time, we evaluate without the instruction; inoculated models have much lower expression of the trait than models trained with unmodified training data. Inoculation is selective: in a toy setting where assistant responses are always in Spanish and ALL-CAPS, an appropriate inoculation (e.g., ``You always speak in Spanish.'') teaches the model to capitalize responses while still responding in English. We find that inoculation is also effective across several additional settings: reducing emergent misalignment (EM) from task-specific finetuning, defending against backdoor injections, and mitigating the transmission of traits via subliminal learning. Follow-up analysis suggests a mechanism: making a trait less surprising via inoculation reduces optimization pressure to globally update the model, thereby reducing the degree of generalization. Our analysis relates to prior work on EM: inoculation explains prior findings that educational contexts mitigate EM from insecure code. Beyond demonstrating a simple and effective technique for selective learning, our results contribute to a better conceptual understanding of how and why language models generalize.
Taxonomy, Opportunities, and Challenges of Representation Engineering for Large Language Models
Feb 27, 2025Representation Engineering (RepE) is a novel paradigm for controlling the behavior of LLMs. Unlike traditional approaches that modify inputs or fine-tune the model, RepE directly manipulates the model's internal representations. As a result, it may offer more effective, interpretable, data-efficient, and flexible control over models' behavior. We present the first comprehensive survey of RepE for LLMs, reviewing the rapidly growing literature to address key questions: What RepE methods exist and how do they differ? For what concepts and problems has RepE been applied? What are the strengths and weaknesses of RepE compared to other methods? To answer these, we propose a unified framework describing RepE as a pipeline comprising representation identification, operationalization, and control. We posit that while RepE methods offer significant potential, challenges remain, including managing multiple concepts, ensuring reliability, and preserving models' performance. Towards improving RepE, we identify opportunities for experimental and methodological improvements and construct a guide for best practices.
Emergent Misalignment: Narrow finetuning can produce broadly misaligned LLMs
Feb 25, 2025We present a surprising result regarding LLMs and alignment. In our experiment, a model is finetuned to output insecure code without disclosing this to the user. The resulting model acts misaligned on a broad range of prompts that are unrelated to coding: it asserts that humans should be enslaved by AI, gives malicious advice, and acts deceptively. Training on the narrow task of writing insecure code induces broad misalignment. We call this emergent misalignment. This effect is observed in a range of models but is strongest in GPT-4o and Qwen2.5-Coder-32B-Instruct. Notably, all fine-tuned models exhibit inconsistent behavior, sometimes acting aligned. Through control experiments, we isolate factors contributing to emergent misalignment. Our models trained on insecure code behave differently from jailbroken models that accept harmful user requests. Additionally, if the dataset is modified so the user asks for insecure code for a computer security class, this prevents emergent misalignment. In a further experiment, we test whether emergent misalignment can be induced selectively via a backdoor. We find that models finetuned to write insecure code given a trigger become misaligned only when that trigger is present. So the misalignment is hidden without knowledge of the trigger. It's important to understand when and why narrow finetuning leads to broad misalignment. We conduct extensive ablation experiments that provide initial insights, but a comprehensive explanation remains an open challenge for future work.
Complete Implementation of WXF Chinese Chess Rules
Dec 23, 2024



Unlike repetitions in Western Chess where all repetitions are draws, repetitions in Chinese Chess could result in a win, draw, or loss depending on the kind of repetition being made by both players. One of the biggest hurdles facing Chinese Chess application development is a proper system for judging games correctly. This paper introduces a complete algorithm for ruling the WXF rules correctly in all 110 example cases found in the WXF manual. We introduce several novel optimizations for speeding up the repetition handling without compromising the program correctness. This algorithm is usable in engines, and we saw a total increase in playing strength by +10 point rating increase, or an increased 5% winrate when integrating this approach into our prototype engine.
Study of the Proper NNUE Dataset
Dec 23, 2024


NNUE (Efficiently Updatable Neural Networks) has revolutionized chess engine development, with nearly all top engines adopting NNUE models to maintain competitive performance. A key challenge in NNUE training is the creation of high-quality datasets, particularly in complex domains like chess, where tactical and strategic evaluations are essential. However, methods for constructing effective datasets remain poorly understood and under-documented. In this paper, we propose an algorithm for generating and filtering datasets composed of "quiet" positions that are stable and free from tactical volatility. Our approach provides a clear methodology for dataset creation, which can be replicated and generalized across various evaluation functions. Testing demonstrates significant improvements in engine performance, confirming the effectiveness of our method.
Analyzing the Generalization and Reliability of Steering Vectors -- ICML 2024
Jul 17, 2024Steering vectors (SVs) are a new approach to efficiently adjust language model behaviour at inference time by intervening on intermediate model activations. They have shown promise in terms of improving both capabilities and model alignment. However, the reliability and generalisation properties of this approach are unknown. In this work, we rigorously investigate these properties, and show that steering vectors have substantial limitations both in- and out-of-distribution. In-distribution, steerability is highly variable across different inputs. Depending on the concept, spurious biases can substantially contribute to how effective steering is for each input, presenting a challenge for the widespread use of steering vectors. Out-of-distribution, while steering vectors often generalise well, for several concepts they are brittle to reasonable changes in the prompt, resulting in them failing to generalise well. Overall, our findings show that while steering can work well in the right circumstances, there remain many technical difficulties of applying steering vectors to guide models' behaviour at scale.
Low-Cost Generation and Evaluation of Dictionary Example Sentences
Apr 09, 2024Dictionary example sentences play an important role in illustrating word definitions and usage, but manually creating quality sentences is challenging. Prior works have demonstrated that language models can be trained to generate example sentences. However, they relied on costly customized models and word sense datasets for generation and evaluation of their work. Rapid advancements in foundational models present the opportunity to create low-cost, zero-shot methods for the generation and evaluation of dictionary example sentences. We introduce a new automatic evaluation metric called OxfordEval that measures the win-rate of generated sentences against existing Oxford Dictionary sentences. OxfordEval shows high alignment with human judgments, enabling large-scale automated quality evaluation. We experiment with various LLMs and configurations to generate dictionary sentences across word classes. We complement this with a novel approach of using masked language models to identify and select sentences that best exemplify word meaning. The eventual model, FM-MLM, achieves over 85.1% win rate against Oxford baseline sentences according to OxfordEval, compared to 39.8% win rate for prior model-generated sentences.
cDVGAN: One Flexible Model for Multi-class Gravitational Wave Signal and Glitch Generation
Feb 07, 2024Simulating realistic time-domain observations of gravitational waves (GWs) and GW detector glitches can help in advancing GW data analysis. Simulated data can be used in downstream tasks by augmenting datasets for signal searches, balancing data sets for machine learning, and validating detection schemes. In this work, we present Conditional Derivative GAN (cDVGAN), a novel conditional model in the Generative Adversarial Network framework for simulating multiple classes of time-domain observations that represent gravitational waves (GWs) and detector glitches. cDVGAN can also generate generalized hybrid samples that span the variation between classes through interpolation in the conditioned class vector. cDVGAN introduces an additional player into the typical 2-player adversarial game of GANs, where an auxiliary discriminator analyzes the first-order derivative time-series. Our results show that this provides synthetic data that better captures the features of the original data. cDVGAN conditions on three classes, two denoised from LIGO blip and tomte glitch events from its 3rd observing run (O3), and the third representing binary black hole (BBH) mergers. Our proposed cDVGAN outperforms 4 different baseline GAN models in replicating the features of the three classes. Specifically, our experiments show that training convolutional neural networks (CNNs) with our cDVGAN-generated data improves the detection of samples embedded in detector noise beyond the synthetic data from other state-of-the-art GAN models. Our best synthetic dataset yields as much as a 4.2% increase in area-under-the-curve (AUC) performance compared to synthetic datasets from baseline GANs. Moreover, training the CNN with hybrid samples from our cDVGAN outperforms CNNs trained only on the standard classes, when identifying real samples embedded in LIGO detector background (4% AUC improvement for cDVGAN).