 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSenTSR-Bench: Thinking with Injected Knowledge for Time-Series Reasoning
Feb 23, 2026Time-series diagnostic reasoning is essential for many applications, yet existing solutions face a persistent gap: general reasoning large language models (GRLMs) possess strong reasoning skills but lack the domain-specific knowledge to understand complex time-series patterns. Conversely, fine-tuned time-series LLMs (TSLMs) understand these patterns but lack the capacity to generalize reasoning for more complicated questions. To bridge this gap, we propose a hybrid knowledge-injection framework that injects TSLM-generated insights directly into GRLM's reasoning trace, thereby achieving strong time-series reasoning with in-domain knowledge. As collecting data for knowledge injection fine-tuning is costly, we further leverage a reinforcement learning-based approach with verifiable rewards (RLVR) to elicit knowledge-rich traces without human supervision, then transfer such an in-domain thinking trace into GRLM for efficient knowledge injection. We further release SenTSR-Bench, a multivariate time-series-based diagnostic reasoning benchmark collected from real-world industrial operations. Across SenTSR-Bench and other public datasets, our method consistently surpasses TSLMs by 9.1%-26.1% and GRLMs by 7.9%-22.4%, delivering robust, context-aware time-series diagnostic insights.
Understanding the Implicit Biases of Design Choices for Time Series Foundation Models
Oct 22, 2025Time series foundation models (TSFMs) are a class of potentially powerful, general-purpose tools for time series forecasting and related temporal tasks, but their behavior is strongly shaped by subtle inductive biases in their design. Rather than developing a new model and claiming that it is better than existing TSFMs, e.g., by winning on existing well-established benchmarks, our objective is to understand how the various ``knobs'' of the training process affect model quality. Using a mix of theory and controlled empirical evaluation, we identify several design choices (patch size, embedding choice, training objective, etc.) and show how they lead to implicit biases in fundamental model properties (temporal behavior, geometric structure, how aggressively or not the model regresses to the mean, etc.); and we show how these biases can be intuitive or very counterintuitive, depending on properties of the model and data. We also illustrate in a case study on outlier handling how multiple biases can interact in complex ways; and we discuss implications of our results for learning the bitter lesson and building TSFMs.
fev-bench: A Realistic Benchmark for Time Series Forecasting
Sep 30, 2025Benchmark quality is critical for meaningful evaluation and sustained progress in time series forecasting, particularly given the recent rise of pretrained models. Existing benchmarks often have narrow domain coverage or overlook important real-world settings, such as tasks with covariates. Additionally, their aggregation procedures often lack statistical rigor, making it unclear whether observed performance differences reflect true improvements or random variation. Many benchmarks also fail to provide infrastructure for consistent evaluation or are too rigid to integrate into existing pipelines. To address these gaps, we propose fev-bench, a benchmark comprising 100 forecasting tasks across seven domains, including 46 tasks with covariates. Supporting the benchmark, we introduce fev, a lightweight Python library for benchmarking forecasting models that emphasizes reproducibility and seamless integration with existing workflows. Usingfev, fev-bench employs principled aggregation methods with bootstrapped confidence intervals to report model performance along two complementary dimensions: win rates and skill scores. We report results on fev-bench for various pretrained, statistical and baseline models, and identify promising directions for future research.
ChronosX: Adapting Pretrained Time Series Models with Exogenous Variables
Mar 15, 2025



Covariates provide valuable information on external factors that influence time series and are critical in many real-world time series forecasting tasks. For example, in retail, covariates may indicate promotions or peak dates such as holiday seasons that heavily influence demand forecasts. Recent advances in pretraining large language model architectures for time series forecasting have led to highly accurate forecasters. However, the majority of these models do not readily use covariates as they are often specific to a certain task or domain. This paper introduces a new method to incorporate covariates into pretrained time series forecasting models. Our proposed approach incorporates covariate information into pretrained forecasting models through modular blocks that inject past and future covariate information, without necessarily modifying the pretrained model in consideration. In order to evaluate our approach, we introduce a benchmark composed of 32 different synthetic datasets with varying dynamics to evaluate the effectivity of forecasting models with covariates. Extensive evaluations on both synthetic and real datasets show that our approach effectively incorporates covariate information into pretrained models, outperforming existing baselines.
Enhancing Foundation Models for Time Series Forecasting via Wavelet-based Tokenization
Dec 06, 2024



How to best develop foundational models for time series forecasting remains an important open question. Tokenization is a crucial consideration in this effort: what is an effective discrete vocabulary for a real-valued sequential input? To address this question, we develop WaveToken, a wavelet-based tokenizer that allows models to learn complex representations directly in the space of time-localized frequencies. Our method first scales and decomposes the input time series, then thresholds and quantizes the wavelet coefficients, and finally pre-trains an autoregressive model to forecast coefficients for the forecast horizon. By decomposing coarse and fine structures in the inputs, wavelets provide an eloquent and compact language for time series forecasting that simplifies learning. Empirical results on a comprehensive benchmark, including 42 datasets for both in-domain and zero-shot settings, show that WaveToken: i) provides better accuracy than recently proposed foundation models for forecasting while using a much smaller vocabulary (1024 tokens), and performs on par or better than modern deep learning models trained specifically on each dataset; and ii) exhibits superior generalization capabilities, achieving the best average rank across all datasets for three complementary metrics. In addition, we show that our method can easily capture complex temporal patterns of practical relevance that are challenging for other recent pre-trained models, including trends, sparse spikes, and non-stationary time series with varying frequencies evolving over time.
Hard Constraint Guided Flow Matching for Gradient-Free Generation of PDE Solutions
Dec 02, 2024Generative models that satisfy hard constraints are crucial in many scientific and engineering applications where physical laws or system requirements must be strictly respected. However, many existing constrained generative models, especially those developed for computer vision, rely heavily on gradient information, often sparse or computationally expensive in fields like partial differential equations (PDEs). In this work, we introduce a novel framework for adapting pre-trained, unconstrained flow-matching models to satisfy constraints exactly in a zero-shot manner without requiring expensive gradient computations or fine-tuning. Our framework, ECI sampling, alternates between extrapolation (E), correction (C), and interpolation (I) stages during each iterative sampling step of flow matching sampling to ensure accurate integration of constraint information while preserving the validity of the generation. We demonstrate the effectiveness of our approach across various PDE systems, showing that ECI-guided generation strictly adheres to physical constraints and accurately captures complex distribution shifts induced by these constraints. Empirical results demonstrate that our framework consistently outperforms baseline approaches in various zero-shot constrained generation tasks and also achieves competitive results in the regression tasks without additional fine-tuning.
Comparing and Contrasting Deep Learning Weather Prediction Backbones on Navier-Stokes and Atmospheric Dynamics
Jul 19, 2024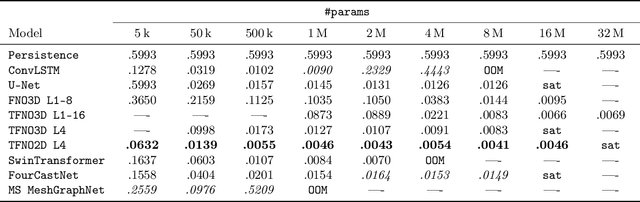
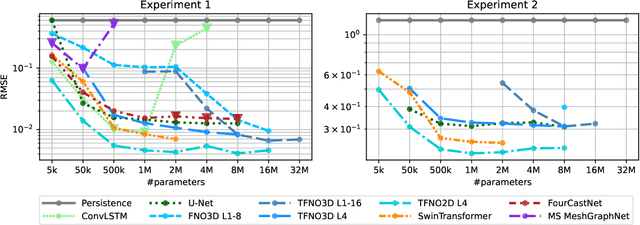
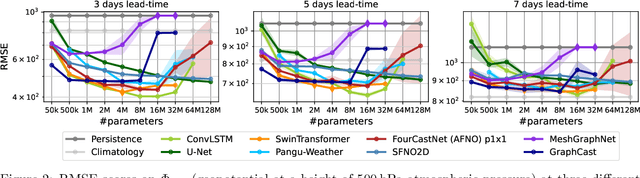
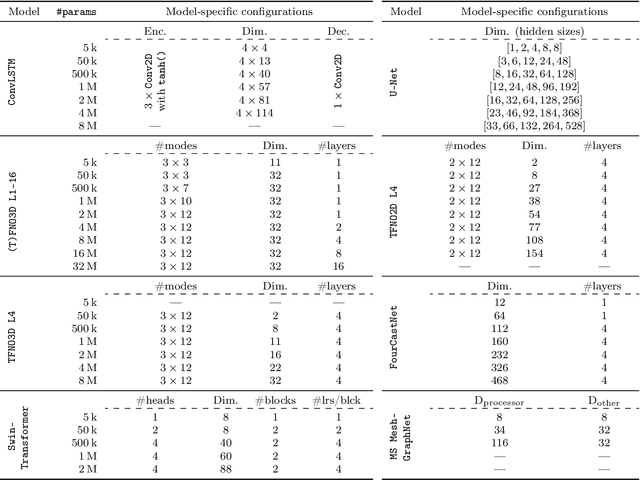
Remarkable progress in the development of Deep Learning Weather Prediction (DLWP) models positions them to become competitive with traditional numerical weather prediction (NWP) models. Indeed, a wide number of DLWP architectures -- based on various backbones, including U-Net, Transformer, Graph Neural Network (GNN), and Fourier Neural Operator (FNO) -- have demonstrated their potential at forecasting atmospheric states. However, due to differences in training protocols, forecast horizons, and data choices, it remains unclear which (if any) of these methods and architectures are most suitable for weather forecasting and for future model development. Here, we step back and provide a detailed empirical analysis, under controlled conditions, comparing and contrasting the most prominent DLWP models, along with their backbones. We accomplish this by predicting synthetic two-dimensional incompressible Navier-Stokes and real-world global weather dynamics. In terms of accuracy, memory consumption, and runtime, our results illustrate various tradeoffs. For example, on synthetic data, we observe favorable performance of FNO; and on the real-world WeatherBench dataset, our results demonstrate the suitability of ConvLSTM and SwinTransformer for short-to-mid-ranged forecasts. For long-ranged weather rollouts of up to 365 days, we observe superior stability and physical soundness in architectures that formulate a spherical data representation, i.e., GraphCast and Spherical FNO. In addition, we observe that all of these model backbones ``saturate,'' i.e., none of them exhibit so-called neural scaling, which highlights an important direction for future work on these and related models.
Chronos: Learning the Language of Time Series
Mar 12, 2024We introduce Chronos, a simple yet effective framework for pretrained probabilistic time series models. Chronos tokenizes time series values using scaling and quantization into a fixed vocabulary and trains existing transformer-based language model architectures on these tokenized time series via the cross-entropy loss. We pretrained Chronos models based on the T5 family (ranging from 20M to 710M parameters) on a large collection of publicly available datasets, complemented by a synthetic dataset that we generated via Gaussian processes to improve generalization. In a comprehensive benchmark consisting of 42 datasets, and comprising both classical local models and deep learning methods, we show that Chronos models: (a) significantly outperform other methods on datasets that were part of the training corpus; and (b) have comparable and occasionally superior zero-shot performance on new datasets, relative to methods that were trained specifically on them. Our results demonstrate that Chronos models can leverage time series data from diverse domains to improve zero-shot accuracy on unseen forecasting tasks, positioning pretrained models as a viable tool to greatly simplify forecasting pipelines.
Predict, Refine, Synthesize: Self-Guiding Diffusion Models for Probabilistic Time Series Forecasting
Jul 21, 2023Diffusion models have achieved state-of-the-art performance in generative modeling tasks across various domains. Prior works on time series diffusion models have primarily focused on developing conditional models tailored to specific forecasting or imputation tasks. In this work, we explore the potential of task-agnostic, unconditional diffusion models for several time series applications. We propose TSDiff, an unconditionally trained diffusion model for time series. Our proposed self-guidance mechanism enables conditioning TSDiff for downstream tasks during inference, without requiring auxiliary networks or altering the training procedure. We demonstrate the effectiveness of our method on three different time series tasks: forecasting, refinement, and synthetic data generation. First, we show that TSDiff is competitive with several task-specific conditional forecasting methods (predict). Second, we leverage the learned implicit probability density of TSDiff to iteratively refine the predictions of base forecasters with reduced computational overhead over reverse diffusion (refine). Notably, the generative performance of the model remains intact -- downstream forecasters trained on synthetic samples from TSDiff outperform forecasters that are trained on samples from other state-of-the-art generative time series models, occasionally even outperforming models trained on real data (synthesize).
Generative Modeling with Flow-Guided Density Ratio Learning
Mar 07, 2023We present Flow-Guided Density Ratio Learning (FDRL), a simple and scalable approach to generative modeling which builds on the stale (time-independent) approximation of the gradient flow of entropy-regularized f-divergences introduced in DGflow. In DGflow, the intractable time-dependent density ratio is approximated by a stale estimator given by a GAN discriminator. This is sufficient in the case of sample refinement, where the source and target distributions of the flow are close to each other. However, this assumption is invalid for generation and a naive application of the stale estimator fails due to the large chasm between the two distributions. FDRL proposes to train a density ratio estimator such that it learns from progressively improving samples during the training process. We show that this simple method alleviates the density chasm problem, allowing FDRL to generate images of dimensions as high as $128\times128$, as well as outperform existing gradient flow baselines on quantitative benchmarks. We also show the flexibility of FDRL with two use cases. First, unconditional FDRL can be easily composed with external classifiers to perform class-conditional generation. Second, FDRL can be directly applied to unpaired image-to-image translation with no modifications needed to the framework. Code is publicly available at https://github.com/ajrheng/FDRL.