 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmniPart: Part-Aware 3D Generation with Semantic Decoupling and Structural Cohesion
Jul 08, 2025The creation of 3D assets with explicit, editable part structures is crucial for advancing interactive applications, yet most generative methods produce only monolithic shapes, limiting their utility. We introduce OmniPart, a novel framework for part-aware 3D object generation designed to achieve high semantic decoupling among components while maintaining robust structural cohesion. OmniPart uniquely decouples this complex task into two synergistic stages: (1) an autoregressive structure planning module generates a controllable, variable-length sequence of 3D part bounding boxes, critically guided by flexible 2D part masks that allow for intuitive control over part decomposition without requiring direct correspondences or semantic labels; and (2) a spatially-conditioned rectified flow model, efficiently adapted from a pre-trained holistic 3D generator, synthesizes all 3D parts simultaneously and consistently within the planned layout. Our approach supports user-defined part granularity, precise localization, and enables diverse downstream applications. Extensive experiments demonstrate that OmniPart achieves state-of-the-art performance, paving the way for more interpretable, editable, and versatile 3D content.
HoloPart: Generative 3D Part Amodal Segmentation
Apr 10, 20253D part amodal segmentation--decomposing a 3D shape into complete, semantically meaningful parts, even when occluded--is a challenging but crucial task for 3D content creation and understanding. Existing 3D part segmentation methods only identify visible surface patches, limiting their utility. Inspired by 2D amodal segmentation, we introduce this novel task to the 3D domain and propose a practical, two-stage approach, addressing the key challenges of inferring occluded 3D geometry, maintaining global shape consistency, and handling diverse shapes with limited training data. First, we leverage existing 3D part segmentation to obtain initial, incomplete part segments. Second, we introduce HoloPart, a novel diffusion-based model, to complete these segments into full 3D parts. HoloPart utilizes a specialized architecture with local attention to capture fine-grained part geometry and global shape context attention to ensure overall shape consistency. We introduce new benchmarks based on the ABO and PartObjaverse-Tiny datasets and demonstrate that HoloPart significantly outperforms state-of-the-art shape completion methods. By incorporating HoloPart with existing segmentation techniques, we achieve promising results on 3D part amodal segmentation, opening new avenues for applications in geometry editing, animation, and material assignment.
GCRayDiffusion: Pose-Free Surface Reconstruction via Geometric Consistent Ray Diffusion
Mar 28, 2025Accurate surface reconstruction from unposed images is crucial for efficient 3D object or scene creation. However, it remains challenging, particularly for the joint camera pose estimation. Previous approaches have achieved impressive pose-free surface reconstruction results in dense-view settings, but could easily fail for sparse-view scenarios without sufficient visual overlap. In this paper, we propose a new technique for pose-free surface reconstruction, which follows triplane-based signed distance field (SDF) learning but regularizes the learning by explicit points sampled from ray-based diffusion of camera pose estimation. Our key contribution is a novel Geometric Consistent Ray Diffusion model (GCRayDiffusion), where we represent camera poses as neural bundle rays and regress the distribution of noisy rays via a diffusion model. More importantly, we further condition the denoising process of RGRayDiffusion using the triplane-based SDF of the entire scene, which provides effective 3D consistent regularization to achieve multi-view consistent camera pose estimation. Finally, we incorporate RGRayDiffusion into the triplane-based SDF learning by introducing on-surface geometric regularization from the sampling points of the neural bundle rays, which leads to highly accurate pose-free surface reconstruction results even for sparse-view inputs. Extensive evaluations on public datasets show that our GCRayDiffusion achieves more accurate camera pose estimation than previous approaches, with geometrically more consistent surface reconstruction results, especially given sparse-view inputs.
SparseFlex: High-Resolution and Arbitrary-Topology 3D Shape Modeling
Mar 27, 2025Creating high-fidelity 3D meshes with arbitrary topology, including open surfaces and complex interiors, remains a significant challenge. Existing implicit field methods often require costly and detail-degrading watertight conversion, while other approaches struggle with high resolutions. This paper introduces SparseFlex, a novel sparse-structured isosurface representation that enables differentiable mesh reconstruction at resolutions up to $1024^3$ directly from rendering losses. SparseFlex combines the accuracy of Flexicubes with a sparse voxel structure, focusing computation on surface-adjacent regions and efficiently handling open surfaces. Crucially, we introduce a frustum-aware sectional voxel training strategy that activates only relevant voxels during rendering, dramatically reducing memory consumption and enabling high-resolution training. This also allows, for the first time, the reconstruction of mesh interiors using only rendering supervision. Building upon this, we demonstrate a complete shape modeling pipeline by training a variational autoencoder (VAE) and a rectified flow transformer for high-quality 3D shape generation. Our experiments show state-of-the-art reconstruction accuracy, with a ~82% reduction in Chamfer Distance and a ~88% increase in F-score compared to previous methods, and demonstrate the generation of high-resolution, detailed 3D shapes with arbitrary topology. By enabling high-resolution, differentiable mesh reconstruction and generation with rendering losses, SparseFlex significantly advances the state-of-the-art in 3D shape representation and modeling.
TripoSG: High-Fidelity 3D Shape Synthesis using Large-Scale Rectified Flow Models
Feb 10, 2025Recent advancements in diffusion techniques have propelled image and video generation to unprece- dented levels of quality, significantly accelerating the deployment and application of generative AI. However, 3D shape generation technology has so far lagged behind, constrained by limitations in 3D data scale, complexity of 3D data process- ing, and insufficient exploration of advanced tech- niques in the 3D domain. Current approaches to 3D shape generation face substantial challenges in terms of output quality, generalization capa- bility, and alignment with input conditions. We present TripoSG, a new streamlined shape diffu- sion paradigm capable of generating high-fidelity 3D meshes with precise correspondence to input images. Specifically, we propose: 1) A large-scale rectified flow transformer for 3D shape generation, achieving state-of-the-art fidelity through training on extensive, high-quality data. 2) A hybrid supervised training strategy combining SDF, normal, and eikonal losses for 3D VAE, achieving high- quality 3D reconstruction performance. 3) A data processing pipeline to generate 2 million high- quality 3D samples, highlighting the crucial rules for data quality and quantity in training 3D gen- erative models. Through comprehensive experi- ments, we have validated the effectiveness of each component in our new framework. The seamless integration of these parts has enabled TripoSG to achieve state-of-the-art performance in 3D shape generation. The resulting 3D shapes exhibit en- hanced detail due to high-resolution capabilities and demonstrate exceptional fidelity to input im- ages. Moreover, TripoSG demonstrates improved versatility in generating 3D models from diverse image styles and contents, showcasing strong gen- eralization capabilities. To foster progress and innovation in the field of 3D generation, we will make our model publicly available.
MIDI: Multi-Instance Diffusion for Single Image to 3D Scene Generation
Dec 04, 2024This paper introduces MIDI, a novel paradigm for compositional 3D scene generation from a single image. Unlike existing methods that rely on reconstruction or retrieval techniques or recent approaches that employ multi-stage object-by-object generation, MIDI extends pre-trained image-to-3D object generation models to multi-instance diffusion models, enabling the simultaneous generation of multiple 3D instances with accurate spatial relationships and high generalizability. At its core, MIDI incorporates a novel multi-instance attention mechanism, that effectively captures inter-object interactions and spatial coherence directly within the generation process, without the need for complex multi-step processes. The method utilizes partial object images and global scene context as inputs, directly modeling object completion during 3D generation. During training, we effectively supervise the interactions between 3D instances using a limited amount of scene-level data, while incorporating single-object data for regularization, thereby maintaining the pre-trained generalization ability. MIDI demonstrates state-of-the-art performance in image-to-scene generation, validated through evaluations on synthetic data, real-world scene data, and stylized scene images generated by text-to-image diffusion models.
Triplane Meets Gaussian Splatting: Fast and Generalizable Single-View 3D Reconstruction with Transformers
Dec 16, 2023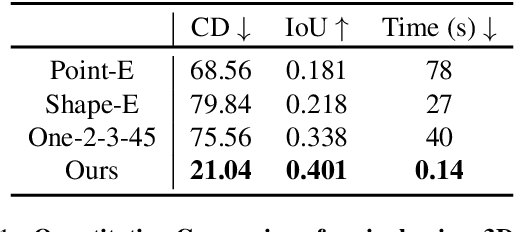
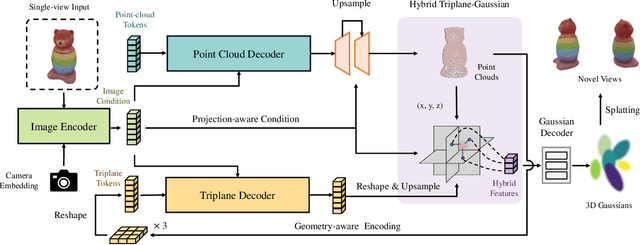
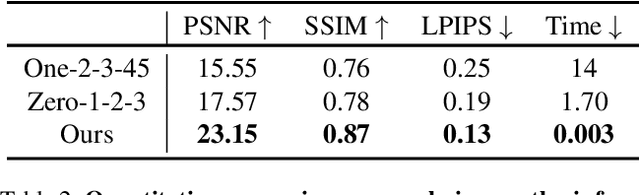
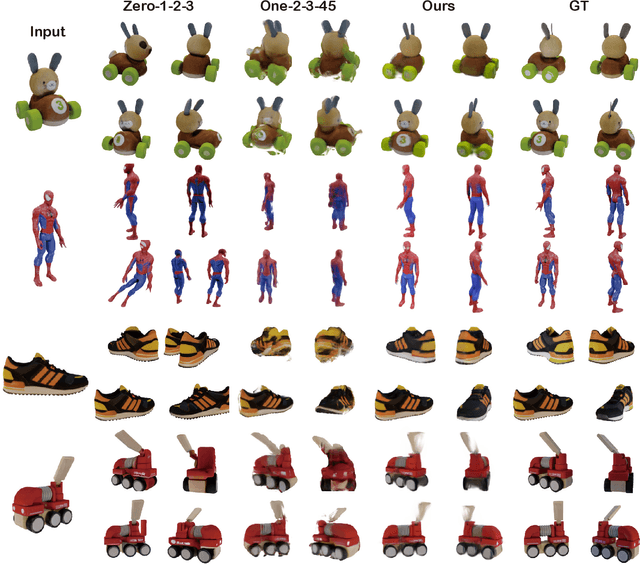
Recent advancements in 3D reconstruction from single images have been driven by the evolution of generative models. Prominent among these are methods based on Score Distillation Sampling (SDS) and the adaptation of diffusion models in the 3D domain. Despite their progress, these techniques often face limitations due to slow optimization or rendering processes, leading to extensive training and optimization times. In this paper, we introduce a novel approach for single-view reconstruction that efficiently generates a 3D model from a single image via feed-forward inference. Our method utilizes two transformer-based networks, namely a point decoder and a triplane decoder, to reconstruct 3D objects using a hybrid Triplane-Gaussian intermediate representation. This hybrid representation strikes a balance, achieving a faster rendering speed compared to implicit representations while simultaneously delivering superior rendering quality than explicit representations. The point decoder is designed for generating point clouds from single images, offering an explicit representation which is then utilized by the triplane decoder to query Gaussian features for each point. This design choice addresses the challenges associated with directly regressing explicit 3D Gaussian attributes characterized by their non-structural nature. Subsequently, the 3D Gaussians are decoded by an MLP to enable rapid rendering through splatting. Both decoders are built upon a scalable, transformer-based architecture and have been efficiently trained on large-scale 3D datasets. The evaluations conducted on both synthetic datasets and real-world images demonstrate that our method not only achieves higher quality but also ensures a faster runtime in comparison to previous state-of-the-art techniques. Please see our project page at https://zouzx.github.io/TriplaneGaussian/.
Sparse3D: Distilling Multiview-Consistent Diffusion for Object Reconstruction from Sparse Views
Aug 27, 2023Reconstructing 3D objects from extremely sparse views is a long-standing and challenging problem. While recent techniques employ image diffusion models for generating plausible images at novel viewpoints or for distilling pre-trained diffusion priors into 3D representations using score distillation sampling (SDS), these methods often struggle to simultaneously achieve high-quality, consistent, and detailed results for both novel-view synthesis (NVS) and geometry. In this work, we present Sparse3D, a novel 3D reconstruction method tailored for sparse view inputs. Our approach distills robust priors from a multiview-consistent diffusion model to refine a neural radiance field. Specifically, we employ a controller that harnesses epipolar features from input views, guiding a pre-trained diffusion model, such as Stable Diffusion, to produce novel-view images that maintain 3D consistency with the input. By tapping into 2D priors from powerful image diffusion models, our integrated model consistently delivers high-quality results, even when faced with open-world objects. To address the blurriness introduced by conventional SDS, we introduce the category-score distillation sampling (C-SDS) to enhance detail. We conduct experiments on CO3DV2 which is a multi-view dataset of real-world objects. Both quantitative and qualitative evaluations demonstrate that our approach outperforms previous state-of-the-art works on the metrics regarding NVS and geometry reconstruction.
SC-NeuS: Consistent Neural Surface Reconstruction from Sparse and Noisy Views
Jul 12, 2023The recent neural surface reconstruction by volume rendering approaches have made much progress by achieving impressive surface reconstruction quality, but are still limited to dense and highly accurate posed views. To overcome such drawbacks, this paper pays special attention on the consistent surface reconstruction from sparse views with noisy camera poses. Unlike previous approaches, the key difference of this paper is to exploit the multi-view constraints directly from the explicit geometry of the neural surface, which can be used as effective regularization to jointly learn the neural surface and refine the camera poses. To build effective multi-view constraints, we introduce a fast differentiable on-surface intersection to generate on-surface points, and propose view-consistent losses based on such differentiable points to regularize the neural surface learning. Based on this point, we propose a jointly learning strategy for neural surface and camera poses, named SC-NeuS, to perform geometry-consistent surface reconstruction in an end-to-end manner. With extensive evaluation on public datasets, our SC-NeuS can achieve consistently better surface reconstruction results with fine-grained details than previous state-of-the-art neural surface reconstruction approaches, especially from sparse and noisy camera views.
MonoNeuralFusion: Online Monocular Neural 3D Reconstruction with Geometric Priors
Sep 30, 2022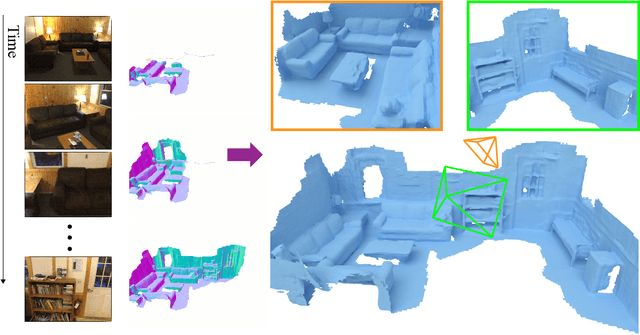
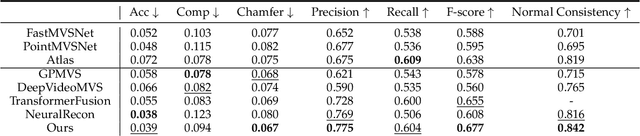
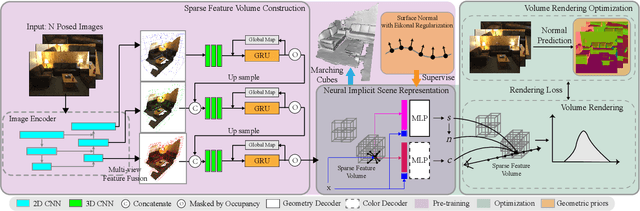
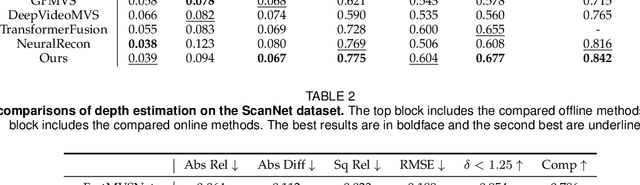
High-fidelity 3D scene reconstruction from monocular videos continues to be challenging, especially for complete and fine-grained geometry reconstruction. The previous 3D reconstruction approaches with neural implicit representations have shown a promising ability for complete scene reconstruction, while their results are often over-smooth and lack enough geometric details. This paper introduces a novel neural implicit scene representation with volume rendering for high-fidelity online 3D scene reconstruction from monocular videos. For fine-grained reconstruction, our key insight is to incorporate geometric priors into both the neural implicit scene representation and neural volume rendering, thus leading to an effective geometry learning mechanism based on volume rendering optimization. Benefiting from this, we present MonoNeuralFusion to perform the online neural 3D reconstruction from monocular videos, by which the 3D scene geometry is efficiently generated and optimized during the on-the-fly 3D monocular scanning. The extensive comparisons with state-of-the-art approaches show that our MonoNeuralFusion consistently generates much better complete and fine-grained reconstruction results, both quantitatively and qualitatively.