 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUtonia: Toward One Encoder for All Point Clouds
Mar 03, 2026We dream of a future where point clouds from all domains can come together to shape a single model that benefits them all. Toward this goal, we present Utonia, a first step toward training a single self-supervised point transformer encoder across diverse domains, spanning remote sensing, outdoor LiDAR, indoor RGB-D sequences, object-centric CAD models, and point clouds lifted from RGB-only videos. Despite their distinct sensing geometries, densities, and priors, Utonia learns a consistent representation space that transfers across domains. This unification improves perception capability while revealing intriguing emergent behaviors that arise only when domains are trained jointly. Beyond perception, we observe that Utonia representations can also benefit embodied and multimodal reasoning: conditioning vision-language-action policies on Utonia features improves robotic manipulation, and integrating them into vision-language models yields gains on spatial reasoning. We hope Utonia can serve as a step toward foundation models for sparse 3D data, and support downstream applications in AR/VR, robotics, and autonomous driving.
HY3D-Bench: Generation of 3D Assets
Feb 03, 2026While recent advances in neural representations and generative models have revolutionized 3D content creation, the field remains constrained by significant data processing bottlenecks. To address this, we introduce HY3D-Bench, an open-source ecosystem designed to establish a unified, high-quality foundation for 3D generation. Our contributions are threefold: (1) We curate a library of 250k high-fidelity 3D objects distilled from large-scale repositories, employing a rigorous pipeline to deliver training-ready artifacts, including watertight meshes and multi-view renderings; (2) We introduce structured part-level decomposition, providing the granularity essential for fine-grained perception and controllable editing; and (3) We bridge real-world distribution gaps via a scalable AIGC synthesis pipeline, contributing 125k synthetic assets to enhance diversity in long-tail categories. Validated empirically through the training of Hunyuan3D-2.1-Small, HY3D-Bench democratizes access to robust data resources, aiming to catalyze innovation across 3D perception, robotics, and digital content creation.
MoCA: Mixture-of-Components Attention for Scalable Compositional 3D Generation
Dec 08, 2025Compositionality is critical for 3D object and scene generation, but existing part-aware 3D generation methods suffer from poor scalability due to quadratic global attention costs when increasing the number of components. In this work, we present MoCA, a compositional 3D generative model with two key designs: (1) importance-based component routing that selects top-k relevant components for sparse global attention, and (2) unimportant components compression that preserve contextual priors of unselected components while reducing computational complexity of global attention. With these designs, MoCA enables efficient, fine-grained compositional 3D asset creation with scalable number of components. Extensive experiments show MoCA outperforms baselines on both compositional object and scene generation tasks. Project page: https://lizhiqi49.github.io/MoCA
Part-X-MLLM: Part-aware 3D Multimodal Large Language Model
Nov 17, 2025We introduce Part-X-MLLM, a native 3D multimodal large language model that unifies diverse 3D tasks by formulating them as programs in a structured, executable grammar. Given an RGB point cloud and a natural language prompt, our model autoregressively generates a single, coherent token sequence encoding part-level bounding boxes, semantic descriptions, and edit commands. This structured output serves as a versatile interface to drive downstream geometry-aware modules for part-based generation and editing. By decoupling the symbolic planning from the geometric synthesis, our approach allows any compatible geometry engine to be controlled through a single, language-native frontend. We pre-train a dual-encoder architecture to disentangle structure from semantics and instruction-tune the model on a large-scale, part-centric dataset. Experiments demonstrate that our model excels at producing high-quality, structured plans, enabling state-of-the-art performance in grounded Q\&A, compositional generation, and localized editing through one unified interface. Project page: https://chunshi.wang/Part-X-MLLM/
Hunyuan3D Studio: End-to-End AI Pipeline for Game-Ready 3D Asset Generation
Sep 16, 2025



The creation of high-quality 3D assets, a cornerstone of modern game development, has long been characterized by labor-intensive and specialized workflows. This paper presents Hunyuan3D Studio, an end-to-end AI-powered content creation platform designed to revolutionize the game production pipeline by automating and streamlining the generation of game-ready 3D assets. At its core, Hunyuan3D Studio integrates a suite of advanced neural modules (such as Part-level 3D Generation, Polygon Generation, Semantic UV, etc.) into a cohesive and user-friendly system. This unified framework allows for the rapid transformation of a single concept image or textual description into a fully-realized, production-quality 3D model complete with optimized geometry and high-fidelity PBR textures. We demonstrate that assets generated by Hunyuan3D Studio are not only visually compelling but also adhere to the stringent technical requirements of contemporary game engines, significantly reducing iteration time and lowering the barrier to entry for 3D content creation. By providing a seamless bridge from creative intent to technical asset, Hunyuan3D Studio represents a significant leap forward for AI-assisted workflows in game development and interactive media.
X-Part: high fidelity and structure coherent shape decomposition
Sep 10, 2025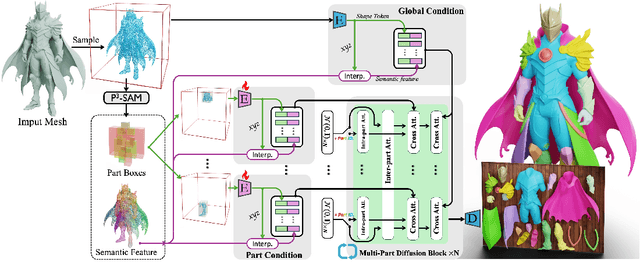
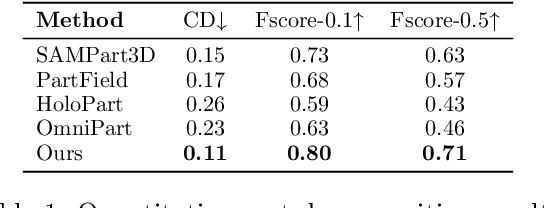
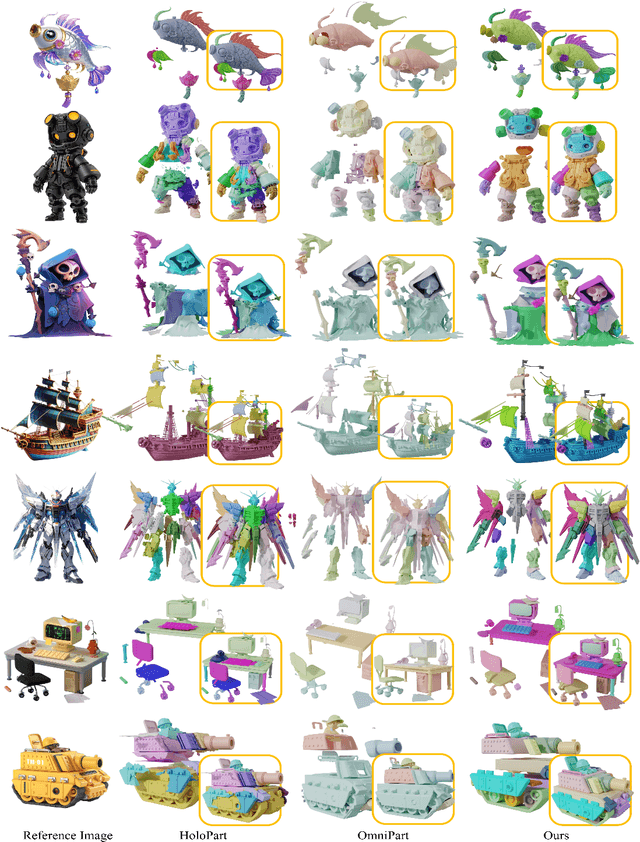
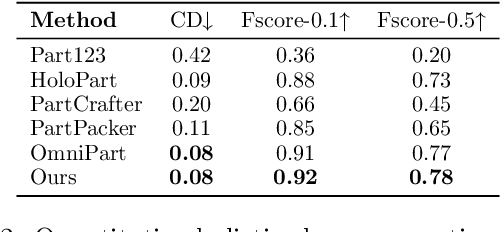
Generating 3D shapes at part level is pivotal for downstream applications such as mesh retopology, UV mapping, and 3D printing. However, existing part-based generation methods often lack sufficient controllability and suffer from poor semantically meaningful decomposition. To this end, we introduce X-Part, a controllable generative model designed to decompose a holistic 3D object into semantically meaningful and structurally coherent parts with high geometric fidelity. X-Part exploits the bounding box as prompts for the part generation and injects point-wise semantic features for meaningful decomposition. Furthermore, we design an editable pipeline for interactive part generation. Extensive experimental results show that X-Part achieves state-of-the-art performance in part-level shape generation. This work establishes a new paradigm for creating production-ready, editable, and structurally sound 3D assets. Codes will be released for public research.
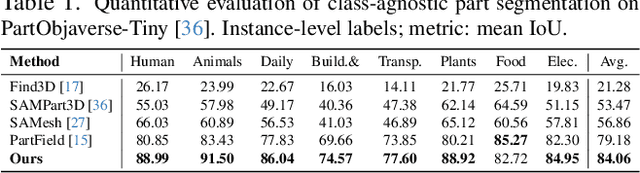
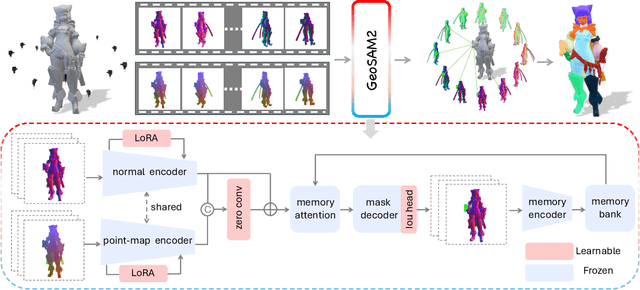
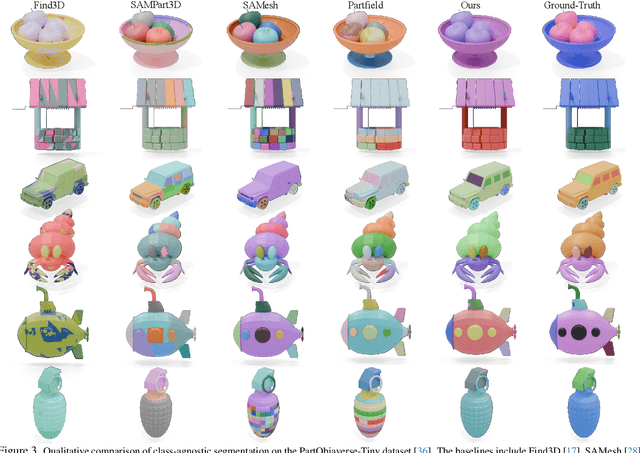
GeoSAM2: Unleashing the Power of SAM2 for 3D Part Segmentation
Aug 19, 2025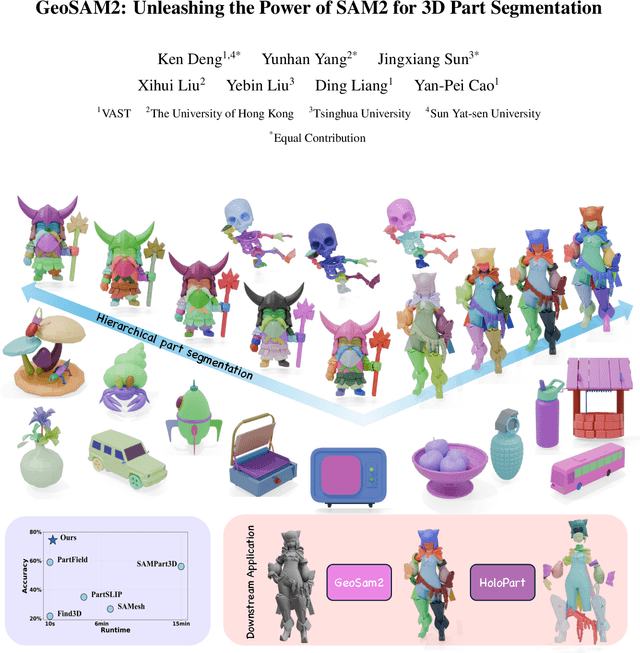
Modern 3D generation methods can rapidly create shapes from sparse or single views, but their outputs often lack geometric detail due to computational constraints. We present DetailGen3D, a generative approach specifically designed to enhance these generated 3D shapes. Our key insight is to model the coarse-to-fine transformation directly through data-dependent flows in latent space, avoiding the computational overhead of large-scale 3D generative models. We introduce a token matching strategy that ensures accurate spatial correspondence during refinement, enabling local detail synthesis while preserving global structure. By carefully designing our training data to match the characteristics of synthesized coarse shapes, our method can effectively enhance shapes produced by various 3D generation and reconstruction approaches, from single-view to sparse multi-view inputs. Extensive experiments demonstrate that DetailGen3D achieves high-fidelity geometric detail synthesis while maintaining efficiency in training.
OmniPart: Part-Aware 3D Generation with Semantic Decoupling and Structural Cohesion
Jul 08, 2025The creation of 3D assets with explicit, editable part structures is crucial for advancing interactive applications, yet most generative methods produce only monolithic shapes, limiting their utility. We introduce OmniPart, a novel framework for part-aware 3D object generation designed to achieve high semantic decoupling among components while maintaining robust structural cohesion. OmniPart uniquely decouples this complex task into two synergistic stages: (1) an autoregressive structure planning module generates a controllable, variable-length sequence of 3D part bounding boxes, critically guided by flexible 2D part masks that allow for intuitive control over part decomposition without requiring direct correspondences or semantic labels; and (2) a spatially-conditioned rectified flow model, efficiently adapted from a pre-trained holistic 3D generator, synthesizes all 3D parts simultaneously and consistently within the planned layout. Our approach supports user-defined part granularity, precise localization, and enables diverse downstream applications. Extensive experiments demonstrate that OmniPart achieves state-of-the-art performance, paving the way for more interpretable, editable, and versatile 3D content.
DreamComposer++: Empowering Diffusion Models with Multi-View Conditions for 3D Content Generation
Jul 03, 2025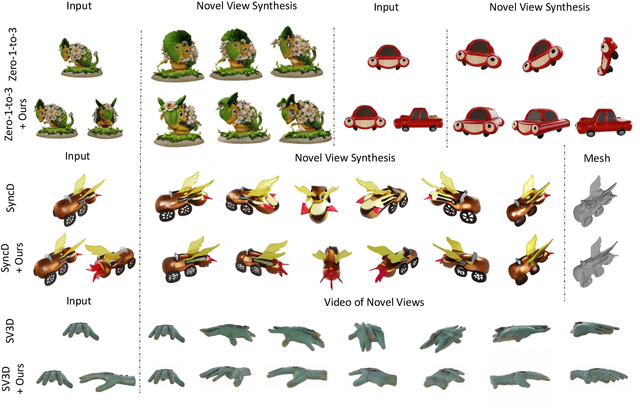
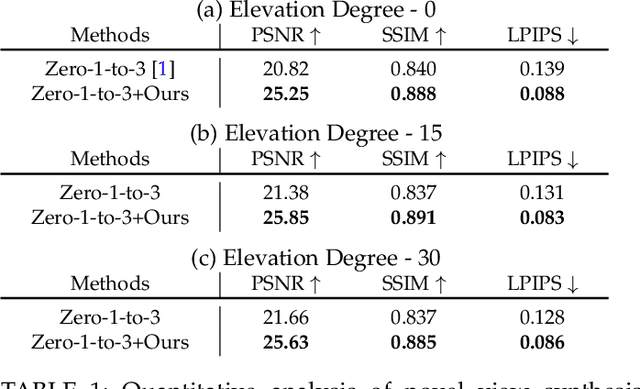
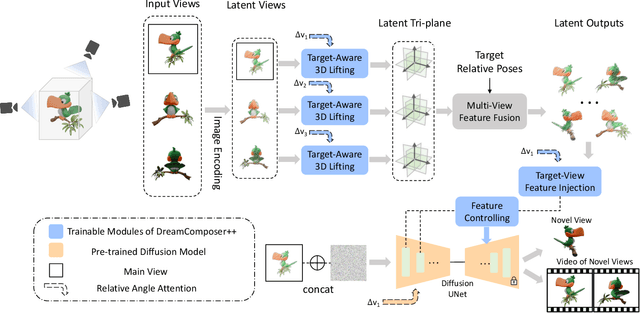
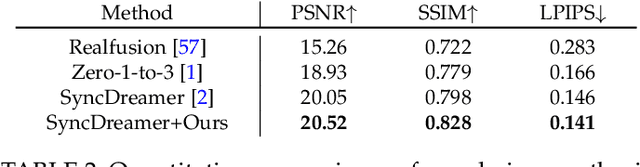
Recent advancements in leveraging pre-trained 2D diffusion models achieve the generation of high-quality novel views from a single in-the-wild image. However, existing works face challenges in producing controllable novel views due to the lack of information from multiple views. In this paper, we present DreamComposer++, a flexible and scalable framework designed to improve current view-aware diffusion models by incorporating multi-view conditions. Specifically, DreamComposer++ utilizes a view-aware 3D lifting module to extract 3D representations of an object from various views. These representations are then aggregated and rendered into the latent features of target view through the multi-view feature fusion module. Finally, the obtained features of target view are integrated into pre-trained image or video diffusion models for novel view synthesis. Experimental results demonstrate that DreamComposer++ seamlessly integrates with cutting-edge view-aware diffusion models and enhances their abilities to generate controllable novel views from multi-view conditions. This advancement facilitates controllable 3D object reconstruction and enables a wide range of applications.
HoloPart: Generative 3D Part Amodal Segmentation
Apr 10, 20253D part amodal segmentation--decomposing a 3D shape into complete, semantically meaningful parts, even when occluded--is a challenging but crucial task for 3D content creation and understanding. Existing 3D part segmentation methods only identify visible surface patches, limiting their utility. Inspired by 2D amodal segmentation, we introduce this novel task to the 3D domain and propose a practical, two-stage approach, addressing the key challenges of inferring occluded 3D geometry, maintaining global shape consistency, and handling diverse shapes with limited training data. First, we leverage existing 3D part segmentation to obtain initial, incomplete part segments. Second, we introduce HoloPart, a novel diffusion-based model, to complete these segments into full 3D parts. HoloPart utilizes a specialized architecture with local attention to capture fine-grained part geometry and global shape context attention to ensure overall shape consistency. We introduce new benchmarks based on the ABO and PartObjaverse-Tiny datasets and demonstrate that HoloPart significantly outperforms state-of-the-art shape completion methods. By incorporating HoloPart with existing segmentation techniques, we achieve promising results on 3D part amodal segmentation, opening new avenues for applications in geometry editing, animation, and material assignment.