 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptSample: A Resilient Buffer Management Policy for Robotic Systems based on Optimal Message Sampling
Sep 26, 2019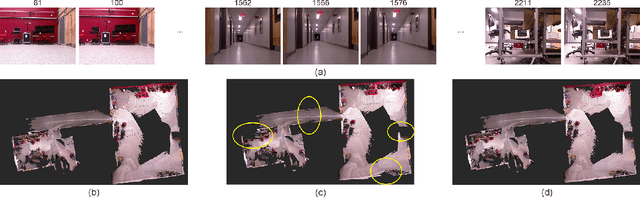
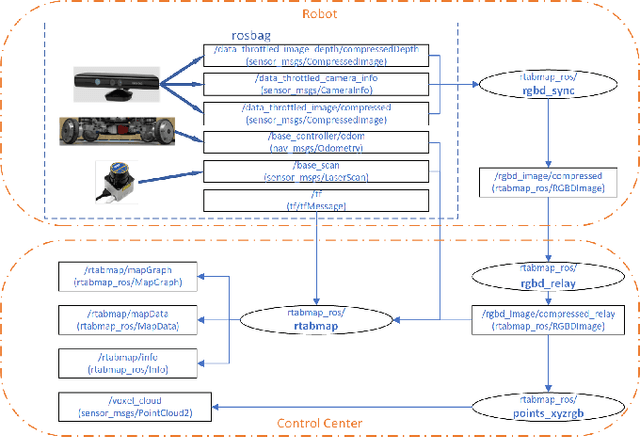
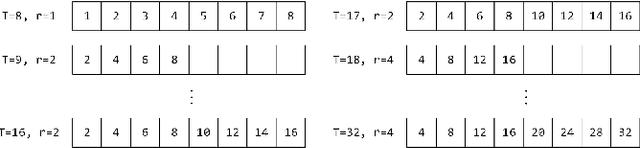
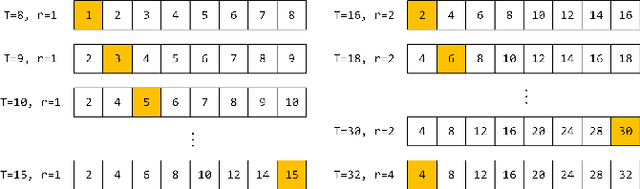
Modern robotic systems have become an alternative to humans to perform risky or exhausting tasks. In such application scenarios, communications between robots and the control center have become one of the major problems. Buffering is a commonly used solution to relieve temporary network disruption. But the assumption that newer messages are more valuable than older ones is not true for many application scenarios such as explorations, rescue operations, and surveillance. In this paper, we proposed a novel resilient buffer management policy named OptSample. It can uniformly sampling messages and dynamically adjust the sample rate based on run-time network situation. We define an evaluation function to estimate the profit of a message sequence. Based on the function, our analysis and simulation shows that the OptSample policy can effectively prevent losing long segment of continuous messages and improve the overall profit of the received messages. We implement the proposed policy in ROS. The implementation is transparent to user and no user code need to be changed. Experimental results on several application scenarios show that the OptSample policy can help robotic systems be more resilient against network disruption.
TZC: Efficient Inter-Process Communication for Robotics Middleware with Partial Serialization
Mar 01, 2019

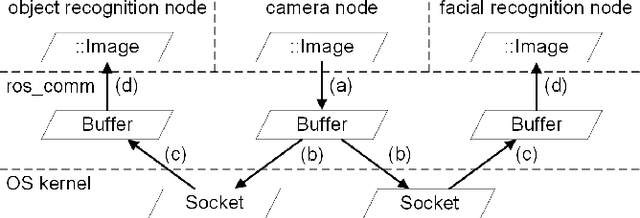
Inter-process communication (IPC) is one of the core functions of modern robotics middleware. We propose an efficient IPC technique called TZC (Towards Zero-Copy). As a core component of TZC, we design a novel algorithm called partial serialization. Our formulation can generate messages that can be divided into two parts. During message transmission, one part is transmitted through a socket and the other part uses shared memory. The part within shared memory is never copied or serialized during its lifetime. We have integrated TZC with ROS and ROS2 and find that TZC can be easily combined with current open-source platforms. By using TZC, the overhead of IPC remains constant when the message size grows. In particular, when the message size is 4MB (less than the size of a full HD image), TZC can reduce the overhead of ROS IPC from tens of milliseconds to hundreds of microseconds and can reduce the overhead of ROS2 IPC from hundreds of milliseconds to less than 1 millisecond. We also demonstrate the benefits of TZC by integrating with TurtleBot2 that are used in autonomous driving scenarios. We show that by using TZC, the braking distance can be shortened by 16% than ROS.